基于比对的捷联惯性测量组合不拆弹标定方法
2011-08-27 07:58:16李海强
探测与控制学报 2011年6期
李海强
(北京自动化控制设备研究所,北京 100074)
0 引言
对于安装在战术导弹中的捷联惯性测量组合(简称SI MU),由于种种原因,惯性器件(包括陀螺和加速度计)的各项误差参数随着时间的推移会发生较大变化[1-3]。造成误差参数变化的因素有:
1)陀螺、加速度计内部磁性材料随环境和时间的变化,直接造成力矩器标度因数的变化。
2)惯性器件其结构材料本身的弹性后效、弹性滞后、材料蠕变以及加工过程中的残余应力等造成偏值随时间的变化。
3)安装惯性器件的结构件变形等。
4)与惯性器件配套的电路板用元器件零位或其他特性变化。
5)印制电路板、内部电缆绝缘性能下降。
以上原因会导致SI MU的精度降低,从而导致导弹性能降低,因此必须采取措施解决。一般来说解决的方法有两种:一是改进工艺及电路、部件的性能,即在设计和工艺上对影响SI MU精度的陀螺、加速度计、再平衡电路等采取相应的措施使其在寿命周期内的变化小到可以满足要求;二是对系统进行定期标定,进一步实施惯性器件的误差补偿。从目前的技术水平看,第一种方法成本较高,一方面还需投入进行研究,另一方面一般采取的措施会大大增加成本。所以通常采取第二种方法,对其进行重新标定。一般战术导弹装备数量较大,如果按研制、生产过程中的标定方法对SI MU进行拆弹标定,工作量大,成本高,不太现实,因此研究在其不从弹上拆下甚至不打开导弹包装箱的状态下,对其精度性能进行评估,以及对其误差进行标定和补偿的方法,具有重要的工程意义。本文提出了一种适用于中低精度SI MU在不拆弹条件下的标定方法。
1 背景
1.1 试验室标定方法
惯性器件通常的误差标定方法是在条件严格控制的试验室内进行,需要大型精密转台,通过位置试验和速率试验实现对SI MU的标定,常用的位置标定试验有六位置、八位置、十二位置法等,由精密转台提供转动位置,给每个陀螺和加速度计提供不同的重力加速度分量输入,在每个位置上采集陀螺和加速度计的输出值,以此可以标定加速度计和陀螺中与角速度无关的参数。陀螺中与角速度有关的参数标定一般进行速率试验,利用速率转台给陀螺提供精确的速率输入,采集陀螺的输出,标定出与角速度相关的参数[4-7]。
1.2 卡尔曼滤波
卡尔曼滤波方程为:

计算方法如下:
该方法被广泛应用于捷联惯性导航系统传递对准和系统级标定中,最常用的有10阶和12阶状态向量,包括3个方向速度、姿态、陀螺零位和加速度计零位。
2 标定方法
2.1 标定原理
本文提出一种在不拆弹条件下,采用一套高精度捷联惯性导航系统代替通常的精密转台作为基准,将其固连在待标定的导弹上,通过起伏路面形成一条能够激励所有误差的运动轨迹,导弹在运输车上沿事先规定的标定路径运行,或者在仓库发射车上将导弹竖起和翻转,测试设备同时采集两套系统输出的导航数据,以两套系统输出信息差值作为观测量,通过建立的39维大维数卡尔曼滤波对误差参数进行辨识,便能估计出误差参数。
本文主要针对中低精度机械陀螺和石英挠性加速度计进行标定,主要考虑那些贮存一段时间后容易发生变化的、对系统影响较大的误差模型进行分析。陀螺误差包括零位误差、与g值有关的一次项、安装误差和标度因数误差,加速度计误差包括零位误差、安装误差和标度因数误差。
2.2 标定路径
标定路径应充分激励惯性器件各项误差。这里给出一种完整的简单实用的路径可供参考。方案为:
1)车静止不动,同时采集两套系统输出信息。
2)静止一定时间后,将车沿导弹的航向角方向转动一圈,同时采集两套系统运动过程中输出信息。
3)车静止不动,对导弹进行竖起操作,竖起后静止一段时间,然后对导弹进行撤收操作,同时采集两套系统输出信息。
4)将车开往沿导弹滚动角方向倾斜的坡路上,然后静止,同时采集两套系统输出信息。
5)试验结束后可利用地面处理设备对数据进行离线处理。
以上标定试验按顺序进行,过程中两套系统不断电。也可加入GPS与基准惯导组合导航信息作为基准,能够提高标定精度。上述标定路径只是为了说明标定方法设置的,实际工作中也可以不按照该路径进行,而是根据实际情况确定最佳的检测位置或标定路径。
2.3 数据处理
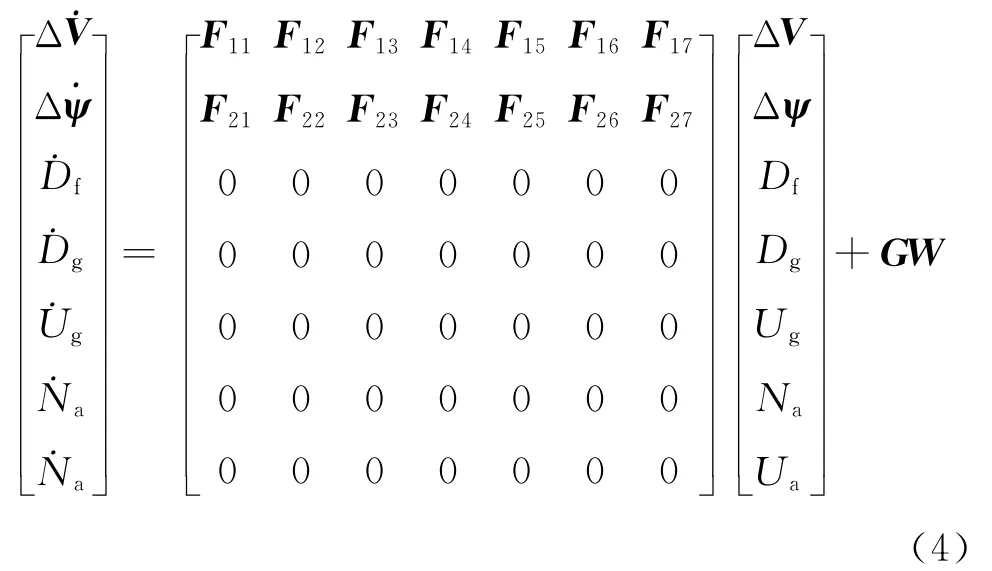
本文建立的大维数卡尔曼滤波状态方程状态向量为:

式(3)中,ΔV为3个方向速度误差;Δψ为3个方向姿态角误差;Df为陀螺零位漂移;Dg为陀螺质量不平衡误差参数,即与g的一次方有关的项;Ug为含陀螺标度因数误差和安装误差参数;Na为加速度计的常值偏差;Ua为含加速度计标度因数误差和安装误差参数。将各项系数展开,得到39阶状态方程,具体为:
式(4)中,

噪声矩阵为:

本文选用的是高精度捷联惯导系统作为基准,为了提高可观性,尽量增加测量信息,选用速度、姿态角、角速率、加速度联合匹配。量测方程为:

式(5)中,

将公式(1)所示的卡尔曼滤波模型离散化,设滤波周期为Δt=tk-tk-1,则系统离散化模型为:

式(6)中,φk,k-1为tk-1至tk时刻的一步转移矩阵,Wk和Vk互不相关;φk,k-1通常按公式(7)计算。

Qk按公式(8)计算。

根据公式(2)的算法进行滤波计算,滤波完成后,便能估计出陀螺和加速度计的各项误差系数。
由于卡尔曼滤波器维数过大,而且滤波时需要进行大量的矩阵解算,影响了实时计算速度,因此目前最好的方法是将测试数据存入磁盘进行事后处理,如果导航计算机硬件配置满足要求,也可将标定系统嵌入导航系统内部,进行实时标定和补偿。
3 试验验证
选取一套高精度激光捷联惯导系统作为基准,选取存放多年,误差较差的液浮SI MU为被测对象。采用双路同步数据采集卡来保证采集两套产品的数据同步。
由于试验条件有限,不能真正在导弹上面进行模拟,而是将基准惯导系统和待标定SI MU安装在同一支架上,忽略其变形和安装间隙,假设初始对准已经完成,通过摇摆台模拟导弹发射车的运动轨迹,按照
2.2 节中提出的标定路径进行标定。
标定前后待标定SI MU各项误差参数如表1所示。从表1可以看出,经补偿后陀螺和加速度计的零位、标度因数能够提高一个数量级,安装误差也有很大的提高。

表1 补偿前后陀螺和加速度计各项误差参数Tab.1 All error parameter of gyro and accelerometer before and after compensation
补偿后,在试验室转台上选取4个位置对SI MU进行了测试,每个位置采集陀螺和加速度计的输出数据,扣除地球角速率和重力加速度分量便得到SI MU输出误差,结果如表2所示。

表2 补偿验证Tab.2 Verification ofcompensation
4位置验证试验表明:陀螺综合误差小于6.0(°)/h,加速度计综合误差小于1 000μg,满足中低精度SIMU的使用要求,说明本文所提出的不开箱标定方案可行有效,标定路径符合工程应用要求,是切实可行的一种方案。
4 结论
本文提出了一种基于比对的捷联惯性测量组合不拆弹标定方法。该方法将高精度捷联惯性导航系统固连在待标定弹上,作为基准,采用类似传递对准的方法,利用大维数卡尔曼滤波对陀螺和加速度计的各项误差进行估计。试验结果表明,该方法能大大提高惯性器件的输出精度,无需转台等大型测试设备,方法简单,易于实现,具有较高的理论意义和工程使用价值。
[1]Mohinder S G,Vinson D H,Randy S M.Application of Kalman Filtering to the calibration and alignment of inertial navigation systems[J].IEEE Transactions on Automatic Control,1991,36(1):4-12.
[2]冯志刚,邹颖.整弹不开箱的惯导系统射前小姿态标定方法[J].中国惯性技术学报,2009,17(1):33-36.FENG Zhigang,ZOU Ying.Method of small gesture calibration for inertial measurement units without opening box prelaunch[J].Journal of Chinese Inertial Technology,2009,17(1):33-36.
[3]Cho S Y,Park C G.Calibration of a redundant IMU[C]//AIAA guidance,navigation,and control conference and exhibit.Providence,Rhode Island:AIAA,2004:2 004-5 123.
[4]袁保伦,饶谷音.一种新的激光陀螺惯性组合标定方法[J].中国惯性技术学报,2007,15(1):31-34.YUAN Baolun,RAO Guyin.A new calibration technique for RLG I MU[J].Journal of Chinese Inertial Technology,2007,15(1):31-34.
[5]卿立,李海强.一种中低精度捷联惯导系统的不开箱标定方法研究[J].中国惯性技术学报,2004,12(4):81-84.QING Li,LI Haiqiang.Method of calibrating strapdown inertial measurement unit of middle and low accuracy without opening box[J].Journal of Chinese Inertial Technology,2004,12(4):81-84.
[6]徐兵华,杨孟兴.激光陀螺捷联惯性导航系统的误差系数标定研究[J].导弹与航天运载技术,2008,7(4):23-25.XU Binghua,YANG Mengxing.Calibration of error parameters in laser gyro strapdown inertial navigation system[J].Missiles and Space Vehicles,2008,7(4):23-25.
[7]秦永元.惯性导航[M].北京:科学出版社,2005:231-262.
猜你喜欢
中国特种设备安全(2021年5期)2021-11-06 05:09:08
现代机械(2021年3期)2021-07-12 00:47:42
客车技术与研究(2019年5期)2019-10-24 02:22:44
北京航空航天大学学报(2017年5期)2017-11-23 05:53:18
中国惯性技术学报(2017年1期)2017-06-09 08:15:14
北京航空航天大学学报(2017年12期)2017-04-23 08:31:50
光学精密工程(2016年5期)2016-11-07 09:06:41
火控雷达技术(2016年1期)2016-02-06 02:18:01
弹箭与制导学报(2015年1期)2015-03-11 15:32:08
电子设计工程(2015年3期)2015-02-27 12:03:53