运动规划在摆臂机构上的应用分析
2011-08-08 10:22庄文波王兵锋李恺丁彭刚
电子工业专用设备 2011年12期
庄文波,王兵锋,李恺,丁彭刚
(北京中电科电子装备有限公司,北京 101601)
半导体产品被广泛应用于医疗、交通、通信等领域。相应的,市场上对半导体封装设备的要求也日渐提高,这使得半导体设备制造商需要不断改进工艺来满足市场需求。
摆臂机构是一些半导体封装设备如固晶机、排片机上的重要组成部分。其运动的稳定性制约着整个设备的性能。由于其高速的特性,容易引起在吸固晶时产生振动,从而影响了设备的性能和产品的品质。如何有效地抑制其产生的振动成为提高设备性能的关键。
目前,多数情况是通过改变摆臂的材料及其结构来消除振动,这在一定程度上抑制了其在高速运动时引起的振动,但是其抑制程度有限,为了进一步抑制振动需对摆臂的运动进行规划。本文通过运用S形速度曲线规划和PID调节,对摆臂机构的两个伺服电机进行运动规划,根据摆臂机构的固有频率分析,对摆臂的吸固晶动作进行平滑处理,从而有效地抑制了摆臂机构的振动问题,提高了设备的性能和产品的品质。
1 摆臂机构原理及固有频率分析
1.1 摆臂机构工作原理
摆臂机构有两个伺服电机构成,分别带动摆臂进行θ向旋转和Z向上下运动,其结构如图1所示。θ向机构和Z向机构之间通过四联杆进行联接,固晶臂在做θ向旋转的同时,Z向机构可以做上下运动。他们之间通过一花键轴进行耦合。固晶臂θ向旋转到吸晶位置经过Z向运动从蓝膜上拾取芯片,然后运动到固晶位置经过Z向运动将芯片置于料架上。

图1 摆臂机构构成示意图
1.2 摆臂固有频率分析
摆臂机构的固晶臂在做高速θ向运动时,通过高速摄像仪发现在其拾放晶片时会产生一定的振动。从振动学知识上分析,固晶壁产生振动的原因:(1)外部激励频率与系统固有频率比较接近导致系统动刚度大幅度降低,从而导致振动发生;(2)系统的固有频率远大于外部激励频率,系统静刚度比较低从而导致振动现象的发生。而机械机构的抗振能力主要取决于它的固有频率和动刚度。因此,通过COSMOSWorks软件对固晶臂进行模态分析[1],得出其固有频率,在机械设计上进行改进提高其抗振能力。
通过高速摄像仪对摆臂机构的运动进行观察发现,调节机械结构在一定程度上提高了机构的抗振能力,但是还是存在一定的振动,对提高整机的效率有一定的影响。这需要在对机构的动作做相应的运动规划,进一步抑制机构的振动,提高整机设备的效率。
2 摆臂机构控制系统结构
整机系统由上位机和下位机构成,上位机采用工控机,下位机采用模拟量运动控制卡,摆臂驱动机构有两个伺服电机构成。控制结构如图2所示。

图2 运动控制系统图
整个摆臂机构的控制系统是一个半闭环的伺服控制系统。其原理是:工控机作为系统的界面管理和图像处理功能单元,负责整机的程序规划,并向控制卡传递指令完成具体的运动。伺服驱动器接受控制卡发出的模拟电压控制伺服电机驱动执行机构运动,伺服电机编码器将反馈值传回驱动器,控制卡根据从驱动器得到的编码器反馈值进行判断,通过反馈比较再传给驱动器,形成一个闭环系统。由于执行机构没有采用光栅尺进行位置反馈,所以整个系统不是一全闭环系统。为满足高速高精度的要求,整个摆臂机构的运动要求:
(1)整个行程为11 650个pulse;
(2)吸晶点到固晶点的运行时间T1≤70 ms;
(3)到位后固晶譬的振动稳定时间T2≤30 ms;
3 速度曲线的选择
常用的速度曲线模式有T形和S曲线形两种。T形运动速度响应快,但是存在加速度突变,容易引起机台振动。S形运动加速度连续变化,使速度变化平滑,运动更平稳。
3.1 T形速度曲线
梯形速度曲线模式下的速度变化过程如图3所示,一个典型的梯形速度曲线控制过程分为:初速阶段、匀加速阶段、匀速阶段、匀减速阶段、初速阶段5个阶段。

图3 梯形速度曲线
梯形运动速度响应快,但是存在加速度的突变,容易引起机构振动,因此不利于抑制摆臂末端的振动。
3.2 S形速度曲线
S形速度曲线模式下的速度变化过程如图4所示,一个典型的S形速度曲线大致分为:加加速、匀加速、减加速、匀速、加减速、匀减速、减减速7 个阶段[2]。

图4 S形速度曲线
S形速度曲线模式下,加速度与时间、速度与时间、位移与时间以及加加速度与时间的函数关系式分别如式(1)、(2)、(3)、(4)所示。




式中Ts——加加速时间;
Ta——加速时间;
To——加速运动时间+匀速运动时间;
L——运动的路程;
Jmax——运动过程中最大加加速度;
Amax——运动过程中最大加速度;
V1——t1时间末端的速度;
V2——t2时间末端的速度;
V3——t3时间末端的速度
S形速度曲线模式解决了梯形速度曲线模式下的加速度突变问题,使速度变化平缓,有利于抑制机构的振动,因此我们选用S形速度曲线模式。
4 基于PID智能控制算法的运动规划
在目前的运动控制过程中,PID控制是最为常用的控制算法。PID控制是按偏差的比例(P)、积分(I)、微分(D)组合而成的一种基于误差的控制规律[3]。比例增益为系统提供刚性,它的大小决定系统响应的快速性;积分增益可以消除系统的稳态误差;微分增益是为系统提供稳定性的阻尼项,能改善系统的动态特性,阻止偏差的变化,有利于减小超调量,缩短调节时间,允许加大比例增益,使得系统的稳定误差减小,提高控制精度。典型的PID控制如图5所示。
PID控制算法的动态方程为:

传递函数为:

其中在式(5)、(6)中:
u(t)——控制系统输入
e(t)——控制系统输出
kp——比例增益
Ti——积分时间
Td——微分时间
PID控制器中有3个可以调整的参数,即:kp、Ti和 Td。
提高比例系数kp可提高系统响应性,但kp如果过大会引起超调导致系统不稳定,如果kp值过小又会造成系统响应过慢,调节时间过长。加大积分系数有利于减少系统静差,但是过大会造成超调引起振荡,过小又对系统消除静差不利。增加微分作用有利于加快系统响应,增加稳定性,但过大会使响应过程提前制动从而延长调节时间,反之则会使调节过程滞后,响应变慢。因此PID调节中的3个参数需要分别设置成一个合适的值,才能使系统控制达到最优。在控制环节中,我们遵循先比例再积分后微分的原则。为满足在高速的情况下同时减少机械的振动,在速度规划上采用高加速低减速的S形速度曲线。
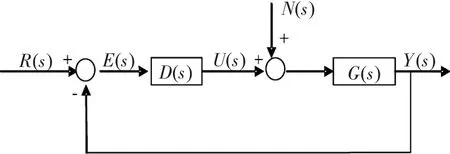
图5 典型控制系统图
摆臂机构中采用富士β电机(100 W),通过反复实验,对固晶臂的各项参数进行调试,固晶臂在吸晶与固晶之间的动作参数如表1所示。

表1 运控参数表
通过调节曲线设置,调节适当的PID参数,调整出比较理想的曲线如图6和图7所示。
通过实验对比,得出摆臂机构固晶臂的动作时间及调整时间如表2所示。
从表2中可以看出,T形速度曲线模式下,由于存在加速度突变的原因,引起振动量比较大,导致调节时间过长。而S形速度曲线模式下,速度比较平滑,振动量小,调节时间比较短。

图6 S形规划-跟踪速度曲线

图7 T形规划-跟踪速度曲线

表2 测量结果
5 结 论
由测试结果可以得出,在摆臂机构的运动过程中,采用模拟量PID控制及S形速度曲线规划,可以有效地抑制固晶臂在吸固晶时产生的振动,弥补了单靠机械自身抑制振动的不足。提高了设备的精度和产品的品质。从而验证了运动规划在摆臂机构上的重要性。
[1] 郎平,郭东.COSMOS在LED粘片机芯片拾取臂振动分析中的应用[J].电子工业专用设备,2011(5):22-23.
[2] 李晓辉,邬义杰,冷洪滨.S曲线加减速控制新方法的研究[J].2007,(10):50-52
[3] 陶永华主编.新型PID控制及其应用[M].北京:机械工业出版社,2002.
猜你喜欢
大电机技术(2022年5期)2022-11-17
当代水产(2022年6期)2022-06-29
大电机技术(2021年2期)2021-07-21
天天爱科学(2020年6期)2020-09-10
疯狂英语·新读写(2020年3期)2020-06-06
汽车观察(2018年12期)2018-12-26
金桥(2018年4期)2018-09-26
劳动保护(2018年8期)2018-09-12
船海工程(2015年4期)2016-01-05
现代机械(2015年1期)2015-01-15