
基于图像处理的超声探头声场测量
2011-07-07 06:52李雄兵胡宏伟倪培君童林军
图学学报 2011年4期
李雄兵, 胡宏伟, 倪培君, 童林军
(1. 中南大学CAD/CAM研究所,湖南 长沙 410075;2. 长沙理工大学汽车与机械工程学院,湖南 长沙 410114;3. 中国兵器科学研究院宁波分院,浙江 宁波 315103)
超声无损检测技术是检测材料内部缺陷的一种重要手段[1],而超声探头是超声波发射和回波接收器件,作为整个检测系统的重要组成部分,当检测设备和工艺确定后,探头的选择便成为确保检测质量的最主要因素,探头的性能要求直接制约着整个检测系统的性能[2]。
探头的声场特性是探头向周围介质辐射声能的分布情况,该特性直接影响到超声探伤的结果。现有的超声探头的声场特性测量方法比较多,其中水听器法和球靶法是最为常用的两种测定方法[3]。水听器法的精度及实时性较好,技术也比较成熟。但它必须尽可能是线性、宽带和无方向性的,且水听器的特性会影响测量结果[4]。本文是利用探头扫描球靶反射体,通过C扫描图像将探头声场可视化,在此基础提取其声场特性。
1 探头声场的特性参数
超声声场的空间分布是由超声检测探头的辐射特性及空间传播特性决定的。对均匀传播空间,辐射声场的空间分布与探头的辐射频率、辐射孔径及辐射结构有关。探头一旦确定,它的声场空间分布也就确定了。如图1所示,表征探头的声场特性的主要有三个参数[5]:近场长度N、孔径大小d和声束半扩散角ψ。近场长度为声源距离最后一个声压最大值处的大小;孔径大小是晶片辐射的有效直径,由横过探头中心部分低于平均回波响应-6dB所测得的声压尺寸;声束半扩散角指在远离近远场过渡区的声束偏离中心线的角度。

图1 超声探头声场特性参数
2 声场数据可视化
本文采用的声场测量系统如图2所示,首先调节探头和球靶处于共轴状态,并将两者水程距置于标准测试距离,使该处的反射声压为最大值;调节探头沿轴线向球靶移动直到给定距离,按探头的标称频率及晶片直径,计算轴向和横向扫查长度、扫查间距,并按照所需声场精度设定扫查间距,采用弓字形扫查,并实时采集超声A波数据,自动识别球靶的表面波提取其峰值,采用调色板及可视化技术将声场数据进行可视化,获得超声C扫描图像。

图2 球靶法声场测量的系统组成
超声C扫描成像就是把球靶回波的峰值转化成相应的颜色,用不同的颜色填充扫描点位邻域来描述其声场特性。超声C扫描图像中最小四边形的组成单元定义为图元,其数学表示为其中i和 j分别表示扫描点的行号和列号,x, y, z为图元位置信息为四边形图元中左上角顶点的三维坐标值,v为球靶回波的峰值。如图3所示,声场的C扫描图像中的图元与矩阵中的各元素一一对应,矩阵就成了C扫描图像在计算机程序中的表现形式,对图像的处理也可以变成对这个矩阵进行各种运算操作。
3 图像处理及特征提取
本文给出一种从 C扫描图像识别声场特征的方法,其工作流程如图4所示,先对C扫描图像进行预处理,消除C扫描图像中的锯齿后将其二值化,使声场从背景中分离开来;接着利用基于边界元的算法提取声场的边缘;最后计算声场的特性参数值,并将测量结果用于指导超声无损检测。

图4 声场图像的处理流程
3.1 预处理及二值化
由于机械回程间隙和超声信号采集滞后等,使成像图元和实际测试的声场位置不重合。如果探头按照弓字形路径进行扫描,采集的信号会有滞后,因此有必要对声场的C扫描图像进行预处理,消除其锯齿现象。
为了提取声场的各特征参数,先得把声场从C扫描图像的背景中分离开来。为此,给出声场阈值v0,对于图像中信号值为v的图元,其二值化后的信号值V,有
阈值的大小是确定声场的依据,它与被检球靶的大小及材质、探头的选取、探伤仪器的参数设置等因素紧密相关。在实际应用中一般按照超声标准试块与半波法进行试验确定合适的阈值。
3.2 图像的边缘检测
轮廓跟踪算法基于声场边界的特征,即探头声场图像经过二值化处理后,声场边界图元与相邻的外侧图元的标记值是不同的。先找出声场的第一个边界图元作为初始点,设定右方位初始跟踪方向,再对初始边界图元周围的8个图元,从初始跟踪方向开始按逆时针顺序依次判断是否是边界图元,找到后将该图元设为当前边界点,然后修改跟踪方向并对其周围图元继续进行判断[6]。边界跟踪算法原理如图5所示,灰色区域为声场,提取算法描述如下:
Step 1 选取图像最左上方图元作为边界提取初始点,跟踪初始方向设定为右方。
Step 2 从初始图元开始沿初始跟踪方向判别该方向图元是否为灰色,图中该方向图元为灰色,将跟踪到的图元作为新的初始点。
Step 3 在原来的跟踪方向沿逆时针旋转90°作为新的跟踪方向,然后判别该方向上的图元是否为灰色,不是灰色则顺时针旋转45°,沿新的方向继续判别,直到找到灰色图元为止。然后将跟踪方向逆时针旋转90°作为新的方向。
Step 4 这样重复上面的过程,直到回到最开始的初始图元处,图像边缘提取结束。
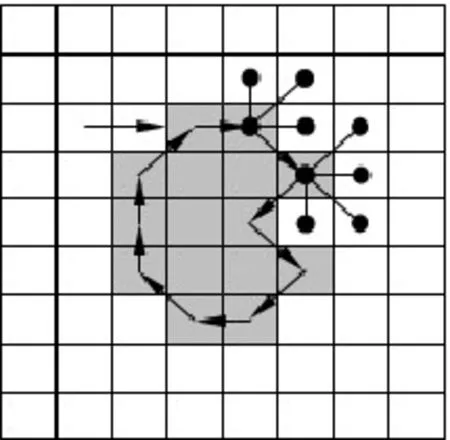
图5 边界跟踪算法示意图
3.3 测量结果的应用
探头声场的测量结果可直接用于指导超声无损探伤:以实测的孔径大小作为有效直径来代替晶片直径进行 AVG当量分析,将有助于提高检测精度。探头扫查速度与孔径大小也存在一定关系,探头的孔径大小愈大,重复频率越高,扫查速度可相应提高。水声程的调整因根据实测的近场长度,并保证工件的二次表面回波落在一次底面回波之后,使缺陷大致处于近场距离附近会有助于提高检测灵敏度。因此,应根据实测半扩散角大小,对反射回波信号根据缺陷深度进行灵敏度补偿,提高缺陷的检测精度。
4 实验及分析
作者以GE公司生产的Benchmark系列探头为例进行试验(标称频率为5MHz、晶片直径为0.5′平探头),按照平面扫查路径规划扫描点,径向扫描点间距为 0.2mm,轴向扫描点间距为0.3mm,扫描面积为500mm×20mm,扫查起始点距离球靶20mm,声场的C扫描图像如图6所示。
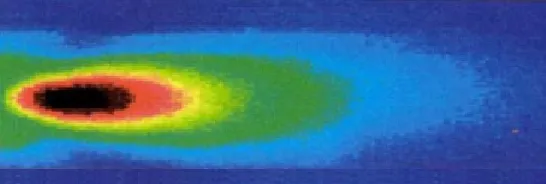
图 6 某探头的声场C扫描图像
采用上述方法对超声 C扫描图像依次进行预处理及二值化、边缘检测,在此基础上提取声场的各参数,该探头声场参数的实测值、理论计算值及其误差如表1所示。孔径大小和半扩散角的实测值与理论值差距较小,近场长度理论值尽管与实测值相差较多,这主要是由于理论近场长度计算是根据单个频率计算所得,而实际测量的近场长度是脉冲波即多个频率在该轴线上的叠加,还与耦合剂等其它因素有关。
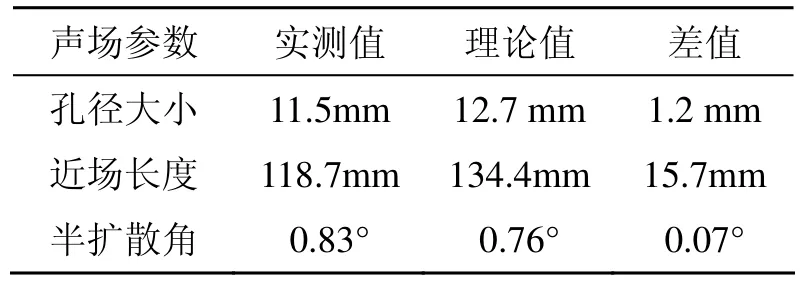
表1 声场参数理论值与实测值的比较
5 结 论
本文首先建立超声探伤的声场特征参数体系,采用球靶法对其声场进行C扫描成像,然后通过声图像处理方法提取各特征参数,最后根据实际检测的声场参数来指导超声无损检测。实验验证表明用该方法测量超声探头声场具有精度较高,稳定性好,且容易实现,可直接用于指导超声检测。
[1]Haase W, Maurer A. Latest development s on industrial ultrasonic testing of aircraft components[C]//Proceedings of the World Conference on Non-Destructive Testing. Montreal, Canada, 2004:225-236.
[2]李家伟, 陈积懋. 无损检测手册[M]. 北京: 机械工业出版社, 2002. 28-30.
[3]ASTM E 1065-99, Standard Guide for Evaluating Characteristics of Ultrasonic Search Units [S].
[4]陈恒庆. 超声波声场测定法及其标准[J]. 冶金标准化与质量, 2003, 41(1): 1-4.
[5]竺科仪. 水浸超声探头频率、声场特性的分析及测定研究[D]. 杭州: 浙江大学, 2006.
[6]李 凌, 周晓军, 李雄兵. 超声 C 扫描图像的缺陷边缘提取及特征参数构建[J]. 中国机械工程, 2007,18(15): 1822-1824.
猜你喜欢
设备管理与维修(2021年17期)2021-11-02
蚌埠医学院学报(2020年4期)2020-12-12
科学与财富(2020年27期)2020-11-10
海洋信息技术与应用(2020年1期)2020-06-11
铁道通信信号(2020年12期)2020-03-29
中国特种设备安全(2019年1期)2019-03-13
家庭影院技术(2018年11期)2019-01-21
无损检测(2016年8期)2016-08-30
山东工业技术(2015年20期)2015-10-13
科技视界(2014年4期)2014-12-26
