变量施肥控制系统设计
2011-07-04 05:45:02怀宝付梁春英王熙李爱平张红霞
黑龙江八一农垦大学学报 2011年4期
怀宝付 ,梁春英 ,王熙 ,李爱平 ,张红霞
(1.黑龙江八一农垦大学信息技术学院,大庆 163319;2.黑龙江八一农垦大学工程学院)
现代农业的高速发展,除了依靠生物技术的进步和耕地面积、灌溉面积的扩大外,基本上是在化肥与农药等化学品和矿物能源的大量投入条件下获得的。但由此引起的水土流失、农产品和地下水污染、土壤生产力下降、水体富营养化等生态环境问题,已经引起了国际社会的广泛关注,并推动了农业可持续发展和精准农业理论的产生和发展。精准农业是现代信息技术,作物栽培管理技术,农业工程装备技术等一系列高新技术的基础上发展起来的一种重要的现代农业生产形式和管理模式,其核心思想是获取农田小区作物产量和影响作物生产的环境因素(如土壤结构、地形、气候、土壤肥力、病虫草害等)实际存在的空间和时间差异信息,分析影响小区产量差异的原因,采取技术上可行,经济上有效的调控措施,改变传统农业大面积、大样本平均投入的资源浪费作法,对做物栽培管理实施定位,按需变量投入。它包括精确变量播种,精确喷洒农药,精确变量灌溉,精确变量施肥,收获信息采集这几个环节。而精准农业的兴起对合理施肥提出了新的理论和技术要求。从化肥的使用来看,肥料利用率低不仅使生产成本偏高,而且造成地表水和地下水污染等环境问题。精确变量施肥的理论和技术将是解决这一问题的有效途径。
1 控制系统方案
选定液压马达作为驱动排肥机构的执行器,采用电磁液压比例阀作为液压马达控制部件,通过闭环控制器输出不同的电信号,来进行控制电磁液压比例阀阀门的开度大小调节液压马达的转速,实现对排肥机构(排肥器)转速的控制,以达到变量施肥的目的[1]。
变量施肥驱动控制装置是一个独立的变量施肥播种机的驱动与控制装置,把它与现有的播种施肥播种机相连接,实现颗粒化肥的变量控制。变量施肥驱动装置可安装在国产大豆施肥精密播种机上,由大型轮式拖拉机牵引进行大豆变量施肥播种作业。安装在拖拉机上DGPS确定播种机在田间的位置,将此位置信息通过RS-232串行接口传送到车载计算机中进行处理,车载计算机将播种机在田间的位置显示在计算机屏幕上,将变量施肥数据库中与田间位置对应的变量施肥数据查找出来,输出到变量闭环控制器中,变量闭环控制器控制电磁液压比例阀的开度,改变大豆精播机排器肥轴转速,达到改变播种机排肥量的目的。变量施肥控制装置组成原理如图1所示。

图1 变量施肥控制装置组成原理框图Fig.1 Diagram of variable rate fertilization control device components
液压马达的转速通过磁阻式转速传感器反馈到闭环控制器主控芯片中形成了闭环控制,另外,多普勒车速雷达传感器(或者通过DGPS测定拖拉机行驶速度)将获得的变量施肥播种机前进的速度信号,并将信号输入到闭环控制器中参与施肥量的调节。
2 电液比例阀控马达系统
我们通过图2可知,阀控马达闭环系统包括指令元件、比较元件、电液比例阀、比例放大器、液压马达和转速传感器等六部分[2]。各基本元件的作用如下:

图2 电液比例阀控马达闭环控制系统框图Fig.2 Diagram of electrohydaulic proportional valve control motor closed-loop system
(1)转速传感器:它用来检测液压马达的转速,测出控制系统的转速反馈信号,用于满足控制系统比较的要求。测速时,当齿轮转动时,由于气隙处的磁力线发生变化,磁路中的磁阻也随之改变,从而可在传感器中产生变化的电信号,经处理变为脉冲信号,此外,由于磁阻传感器具有很强的方向性,传感器探头对齿轮的转动十分敏感,而对齿轮沿轴向的抖动不敏感。这对保证测速精度十分有利。
(2)指令元件:也称输入元件。指令信号可以程序设定或手动设定。在我们研究开发的电液控制系统中,指令元件是车载计算机,由车载计算机通过RS-232串行接口输出指令信号。
(3)比较元件:比较元件的作用是将给定输入信号和反馈信号进行比较,计算出偏差信号作为比例放大器的输入。在本控制系统中,比较元件采用单片计算机。
(4)比例放大器:电液比例阀电磁铁需要的控制电流较大,一般得几百毫安才能驱动,但是从比较元件输出的偏差控制电流较小,通过比例放大器对输入的信号进行加工、整形和放大,使之达到电液比例阀的控制要求。
(5)电液比例阀:它是控制系统中的关键元件。电液比例阀内部由电—机械转换器和液压放大元件两部分组成。电—机械转换器是电液控制接口元件,它把输入的电流信号转换成与电流成正比的力或位移。把电气控制信号放大到足以驱动系统负载。也可称之为整个系统的功率放大部分。
(6)液压马达:它是控制系统的执行元件,用于驱动负载。产生驱动作用力加在变量控制系统排肥器轴上,实现排肥器轴转速无级调节。
3 闭环控制器总体方案
本闭环系统研究采用自主研制的闭环控制器控制施肥轴的转速[3],以期达到变量控制施肥量的目的,因此自主研制的闭环控制器是研究的重点。上位计算机接收GPS定位数据,通过自行研制的变量施肥控制专用软件对位置数据进行处理,并对当前位置进行网格识别,读取数据库中的施肥量数据。然后将变量施肥数据通过计算机RS-232串行接口送到下位机(闭环控制器)中,将施肥数据由数字量转变为模拟量输出;通过放大驱动器将变量信号放大,以控制电磁液压比例阀的开度,控制液压油的流量,从而控制液压马达的转速;播种机施肥轴由液压马达驱动,实现变量控制施肥。变量施肥电控液压驱动控制系统原理框图如图3所示。
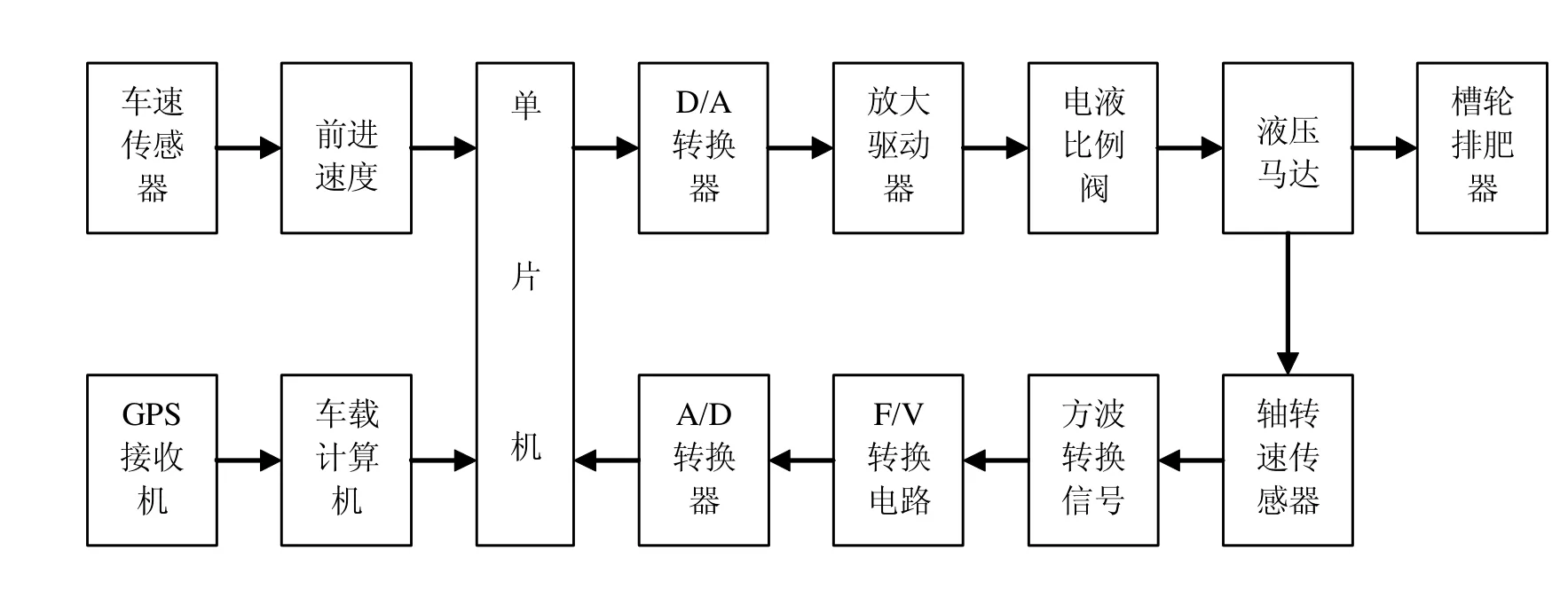
图3 变量施肥电液控制系统原理框图Fig.3 Diagram of electric-hydraulic control variable rate fertilization system
控制系统选用液压马达作为自动变量施肥的执行部分,因为液压马达的力矩大,大型拖拉机都是液压系统的拖拉机,不用额外增加设备。很多学者对于控制系统,经常选用步进电机作为自动变量施肥的执行部分,步进电机工作原理是每接收一个脉冲,步进电机就转过一个角度,在扭矩允许的范围内,不会因为扭矩的变化而失步,可以避免液压马达或直流电机驱动需要使用减速装置,也便于进行控制,对于控制机构的稳定性是有利的;但是引入步进电机,需要提供额外的电力供应,需要拖拉机又额外增加发电设备。
闭环控制器主要由稳压电源电路、单片机系统、复位监控电路、设置参数存储电路、LED数码管显示驱动、4位LED显示数码管电路、频率电压(V/F)转换电路、A/D转换电路、串口RS-232通信转换电路,D/A转换电路,电磁比例阀放大驱动电路等部分电路组成。闭环控制器硬件电路组成框图如图4所示。闭环控制器接收车载计算机控制指令和反馈信号并进行比较,根据比较结果对电液比例阀的开度进行控制,从而控制排肥轴转速。
4 变量施肥闭环控制程序设计
在软件设计时根据系统的功能要求,确定控制系统的数学模型,将软件分成若干个相对独立的功能模块,并根据各模块间的相互关系确定软件的总体结构[4]。在此基础上,画出流程图,根据流程图,采用编辑软件编写源程序,生成目标代码,调试后烧录进单片机。
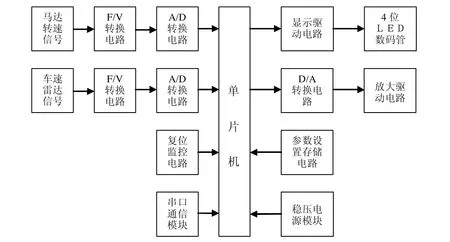
图4 闭环控制器的硬件电路组成框图Fig.4 Diagram of closed-loop controller hardware circuit

图5 主程序流程图Fig.5 Flow chart of main program
变量施肥闭环自动控制系统程序的总体流程如图5所示。变量施肥闭环控制程序主要包括控制系统主程序、串口通信子程序、数据处理子程序、LED数码管显示驱动子程序、参数设置读写子程序、输出控制子程序等。将各个子程序模块组合到一起,得到系统主程序流程图,如图5所示。
5 结论
本文研究开发了以单片计算机为核心的变量施肥闭环控制器,为了验证理论分析的正确性以及变量施肥控制系统性能,开展了电液驱动式变量施肥控制系统的实验室试验,验证了电液驱动式变量施肥机控制系统方案的可行性和稳定性,并对大豆变量施肥播种机进行了标定试验和田间试验。试验结果表明,研制的大豆变量施肥播种机控制系统技术先进、性能可靠、操作方便、具有较高的控制精度、可以在不同作业方式下进行田间作业,满足了控制系统的设计要求。
[1]王熙.精准农业大豆变量施肥控制技术研究[D].大庆:黑龙江八一农垦大学,2010.
[2]梁春英,衣淑娟,王熙,等.变量施肥控制系统PID控制策略[J].农业机械学报,2010,41(7):157-162.
[3]于英杰,张书慧,齐江涛,等.基于传感器的变量施肥机定位方法[J].农业机械学报,2009,40(10):165-168.
[4]陈立平,黄文倩,孟志军,等.基于CAN总线的变量施肥控制器设计[J].农业机械学报,2008,39(8):101-105.
猜你喜欢
北京航空航天大学学报(2022年6期)2022-07-02 01:59:46
北京航空航天大学学报(2022年5期)2022-06-06 09:27:18
化工管理(2021年7期)2021-05-13 00:46:16
装备制造技术(2020年3期)2020-12-25 05:22:38
今日农业(2020年22期)2020-12-14 16:45:58
测控技术(2018年1期)2018-11-25 09:43:30
电子制作(2018年11期)2018-08-04 03:25:58
雷锋(2016年4期)2016-05-30 02:09:48
专用汽车(2016年4期)2016-03-01 04:14:27
学习月刊(2015年10期)2015-07-09 03:35:12