
独立光伏发电系统统一能量控制策略
2011-07-02 10:46:14袁建华高厚磊季笑庆王云波
电工技术学报 2011年1期
袁建华 高 峰 高厚磊 刘 博 季笑庆 王云波
(1.山东大学电气工程学院 济南 250061 2.烟台供电公司 烟台 2640014)
1 引言
独立光伏发电系统使用蓄电池或可调负载来存放和调节电能,蓄电池或可调负载容量与日平均负载及自给天数、放电深度有很大关系[1-2]。此类应用中,为了维持发电与用电平衡,保证系统正常工作,PV较频繁地在MPPT模式[3-5]及稳压模式、限流模式之间切换,各模式下控制方法不同,需要能量管理控制器指导模式转换并对各模式分别进行控制,因此系统整体控制策略较复杂。
文献[6-9]介绍了独立光伏发电系统的结构、设计及控制。其中,文献[6]对独立光伏发电系统使用的蓄电池类型以及如何有效控制其充放电进行了论述;文献[7-9]设计了 PV经直流变换电路接入的独立光伏发电系统,基于蓄电池充、放电状态,对其实施过充、过放保护来使用能量管理控制器对 PV各种模式进行控制及转换。上述应用中,蓄电池过充、过放保护以及 PV各工作模式彼此独立,缺乏能够综合 PV输出控制、蓄电池控制和能量管理控制三方面的统一能量控制策略的研究。
本文对 PV经直流变换(DC-DC)电路接入的独立光伏发电系统各种状态下发电和用电特性进行深入分析,提出一种集 PV后级负载(含蓄电池充、放电,下同)功率获取与 PV输出功率控制于一体的统一能量控制策略,实现系统能量平滑流动,简化了控制算法,可在低成本微控制器中实现。
2 独立光伏系统拓扑及工作原理
2.1 系统拓扑结构
图1为独立光伏发电系统拓扑,系统由光伏电池、DC/DC电路、蓄电池和本地负载以及供电开关S组成,各部分依靠统一能量控制器协调工作。光伏电池经 DC-DC电路接入直流母线,蓄电池通过简单限流电路挂接在母线上。

图1 统一控制策略下独立光伏发电系统拓扑图Fig.1 Topological illustration of stand-alone PV generation system under the unified control strategy
系统由母线为本地负载提供电能:直流负载直接或通过 DC-DC电路经母线获取电能,少量交流负载经逆变电路从母线获取电能。负载种类及大小不固定,但较长时期内整体功率消耗一定,为了分析简单,使用可变电阻替代本地负载。
2.2 工作原理
PV为系统提供长期能量来源,蓄电池可协同PV为负载供电,增加系统供电可靠性,同时稳定母线电压,为负载提供较高质量的供电,限流电路只起到限制最大充、放电电流作用,电流小于限制值时自由通过。
图1中Ppv、PL、Pb分别为PV、负载及蓄电池实际功率。长期来看蓄电池对系统不仅不输入能量,反而需要消耗部分能量来完成电能调节作用,因此分析时看作可调负载,充电时Pb为正,放电时为负。为叙述方便,记负载消耗功率PL及蓄电池充电或放电功率之和为Po,即Po=PL+Pb,显然Po≥0。
3 独立光伏发电系统统一能量控制策略
3.1 光伏电池输出特性
PV电流Ipv与电压Upv的关系由式(1)给出[10]

式中,Ir为光生电流,其大小受光照强度 S影响;I0为饱和电流;n为比例因子;q、k分别为电荷常数和玻耳兹曼常数;T为绝对温度。
依据式(1)绘制出PV在光照不同、结温相同(光照相同、结温不同本文控制策略同样适用)情况下的P-U特性曲线,如图2所示。
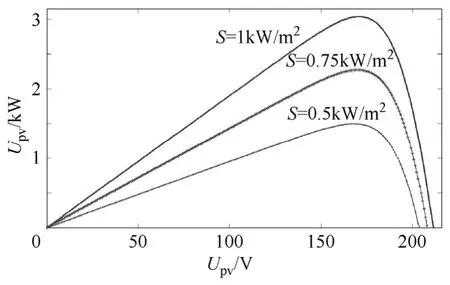
图2 光伏电池P-U曲线Fig.2 The P-U curves of PV
由图2可见,光照强度S对PV功率影响极大,其变化将导致PV输出具有间歇性和波动性[10]。
3.2 直流母线电压与负载功率关系
本文论述的光伏发电系统应用中蓄电池经简单限流电路接入母线,一般情况下母线电压即为蓄电池端电压。为防止蓄电池过充和过放,对母线电压范围必须加以限制,设定母线额定电压 UN为蓄电池浮充电压,最低电压为蓄电池过放电压。
本地负载类型整体上呈阻性,当不考虑负载投切暂态过程,负载和蓄电池获取功率随母线电压成单调增长关系,理想供电状态下其在 UN处获取 Po最大值Po_max,此时负载功率PL最大,蓄电池充电功率也最大。
3.3 系统发、用电功率差与母线电压变化关系
将母线看作一个节点,不考虑损耗,当其电压稳定时,发电和用电是平衡的,即经极短时间Δt(t1→t2),流入、流出电能应相等
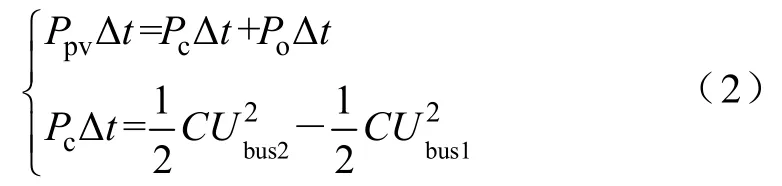
式中,Pc为母线电容交换功率,充电为正,放电为负;Ubus1为母线t1时刻电压;Ubus2为t2时刻电压。
即有

由式(3)可知,Ppv<Po时,Ubus2<Ubus1,母线电压下降;Ppv>Po时,Ubus2>Ubus1,母线电压上升;Ppv=Po时,Ubus2=Ubus1,母线电压维持不变。即理想条件下,系统稳定时Po与Ppv大小应相等。
3.4 统一能量控制策略下PV功率控制
母线电压变化能调节、优化系统后级负载功率,其变化趋势亦反映出 PV功率与后级负载功率的相对关系。在独立光伏发电系统中,负载功率是系统能量流动的自变量,PV功率必须紧随负载功率的变化而变化,是因变量。
统一能量控制策略下系统的控制,就体现出负载功率是自变量而 PV输出功率是其因变量的基本思想:系统启动时Ubus逐渐上升并靠近UN,负载总功率缓慢增加;同时在负载功率逐渐优化的基础上基于能量平衡原理,对 PV进行负载追踪控制:若PV功率不足以维持 Ubus再次上升时,则 Ubus会在UN(含)下的这个电压处小幅振荡;若Ubus一直上升到超过UN时,控制器会通过减少PV功率来减少剩余能量,直至Ubus稳定在UN。
根据P-U特性曲线上Ppv最大值Ppv_max与理想供电条件下负载总功率 Po最大值 Po_max的相对关系,对统一能量控制策略分两种情况进行说明:
(1)Ppv_max>Po_max:Po_max穿越 P-U 曲线,并交于 A、B两点,M是 PV最大功率点,A、M、B将P-U曲线分成4段,如图3上图所示。
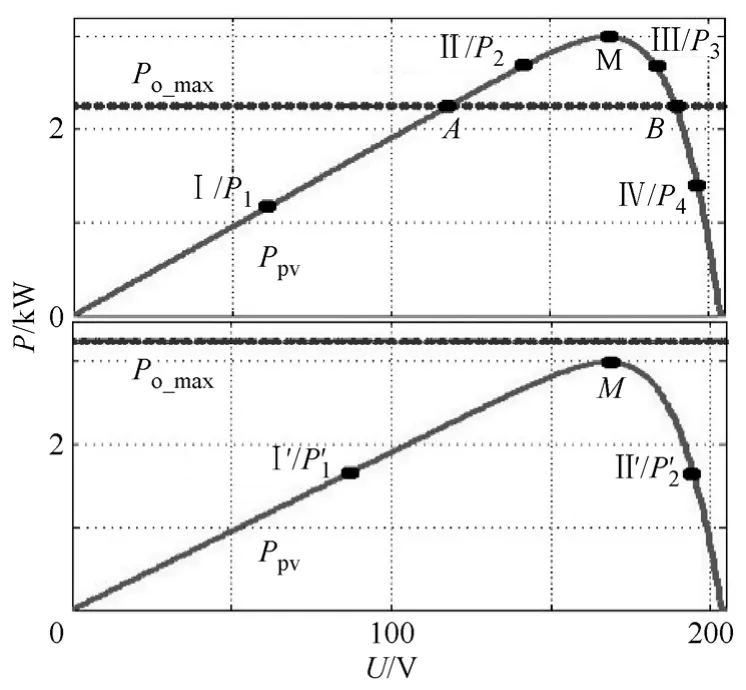
图3 统一控制策略下PV输出功率控制Fig.3 The output power control of PV under the unified control strategy
由前述系统稳定时Po与Ppv大小应相等可知,PV工作在点A、B能确保系统稳定以及提供最优负载功率Po_max,因此A点或B点是控制PV的目标工作点,即 P1→A←P2,P3→B←P4。
对P-U曲线各段(工作点)状态及追踪方向分析如表 1。ΔU=Upv(n+1)-Upvn,即 n+1时刻 PV 电压采样值减去n时刻采样值,减少为“-”,增加为“+”,变量ΔP=Ppv(n+1)-Ppvn、ΔI=Ipv(n+1)-Ipvn规定与ΔU 相同,ΔUbus=Ubusn-UN,即 n时刻母线电压 Ubus与额定电压UN的差,其变化关系可由式(3)判断,记ΔE=ΔPΔIΔUbus。

表1 Ppv_max>Po_max时PV功率追踪控制分析Tab.1 Analysis of the output power tracking of PV under Ppv_max>Po_max condition
(2)Ppv_max≤Po_max:此时Po_max高于或与P-U曲线交于最大功率点M。M点将P-U曲线分成两段,如图3下图所示。对P-U曲线各段状态及追踪方向分析如表2所示(符号标示及变化量定义同上)。

表2 Ppv_max≤Po_max时PV最优功率追踪分析Tab.2 The analysis of the output power tracking of PV under Ppv_max≤Po_max condition
此时系统需求功率大于或等于最大供给功率,PV工作在点M能确保系统获取最大输入能量,这也是蓄电池容量配置充裕的光伏发电系统可采用MPPT单一工作模式的原因。此种情况下,M点是控制PV的目标工作点,即P1→M←P2。
当ΔE为“+”时,ΔI为“-”,即应减少PV电流参考值;当ΔE为“-”时,Δi为“+”,即增加电流参考值,算法流程图如图4a所示。
4 统一能量控制下PV最优工作点追踪
接入 PV的 DC/DC电路主要有三大类:Buck电路、Boost电路以及升降压电路。
实际应用中,PV最大功率点电压与DC/DC电路已做匹配优化,但当 PV远离最大功率点并往左侧A点滑落时,电压下降明显,如图3所示。此时采用 Buck电路接入时,可能因电压过低而导致电路不能正常工作。此外,功率一定时,PV输入电压高意味着输入电流小,可减少线路损耗。综合可知B点是系统最优工作点。
Ppv_max>Po_max时,PV两个基本功率A和B点中B点是最优工作点,图3上图各分段点最优工作点追踪方向为:P1→P2→P3→B←P4;Ppv_max≤Po_max时PV仅有一个最优功率点M,不再需要进行工作点比较寻优,但必须符合统一能量控制算法规则。
选用表 1、表 2中ΔP、ΔUbus和ΔI构建统一能量控制下PV最优工作点追踪算法如下。
最优工作点算法:当ΔP·ΔI为“-”时,Δi为“-”,减少PV电流参考值,使PV功率Ppv增加,一直越过最大功率点M到达ΔP·ΔI为“+”区域;再分两种情况①当ΔUbus为“+”时,Δi为“-”,即减少电流参考值;②当ΔUbus为“-”时,Δi为“+”,即增加电流参考值,算法流程图如图4b所示。
5 仿真验证
在 Matlab S函数中依据式(1)计算不同光照及电压下输出电流Ipv,控制可控电流源输出P-U特性[11]如图2所示。PV仿真模型经Buck-Boost电路接入直流母线(额定电压110V),选用Simulink通用铅酸蓄电池模型[12]直接接入母线,其端电压表示为
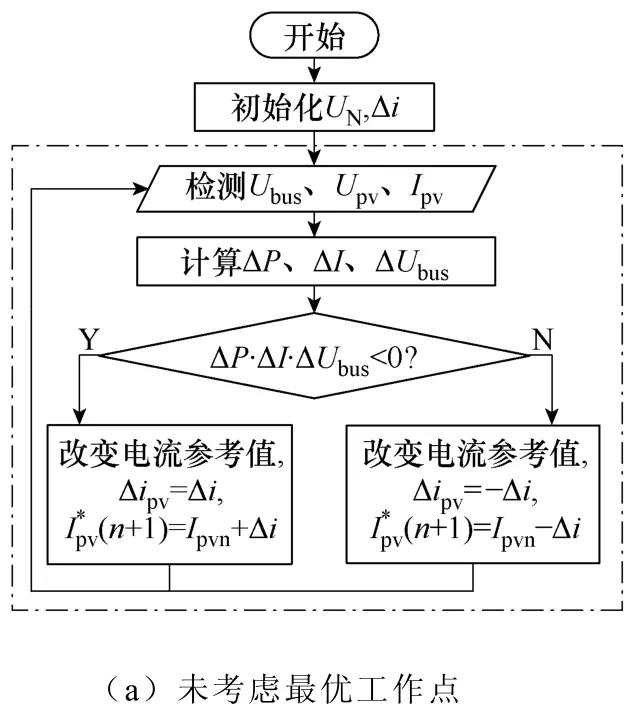
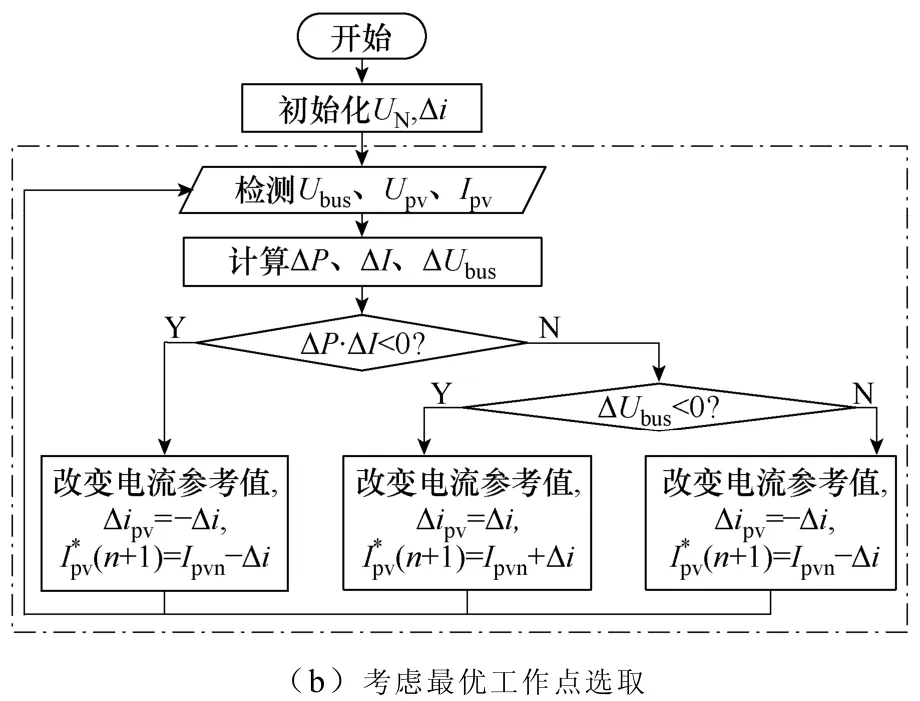
图4 统一控制策略下PV控制流程图Fig.4 Flowchart of PV control under the unified control strategy

式中,E0为电压常量;C为极化电压;Q为蓄电池容量;A为电压指数;B为容量指数。
由于仿真时间受限,设定蓄电池组已充到110V(浮充电压)。负载使用可调电阻替代,其额定功率PN阶跃变化来模拟负载投切。仿真步长1e-5,时间6s。PN及光照引起的Ppv_max变化如图5所示。

图5 Ppv_max及PN设定曲线Fig.5 Setting curve of Ppv_max and PN
直流变换电路采用Buck-Boost电路,其控制方法如文中所述,采用带 PV最优工作点追踪的统一能量控制策略来给定PV电流参考值,算法如图4b所示。
图6为统一能量控制策略下PV电压Upv及功率 Ppv、母线电压 Ubus以及蓄电池充放电电流 ib波形,对比图 5分析发现负载消耗功率 PN低于PV最大功率Ppv_max时,PV输出功率为负载额定功率,蓄电池不放电;而当PN大于或等于PV最大功率Ppv_max时,PV输出最大功率Ppv_max,不足部分由蓄电池放电补充。另外图 6中各种波形在每次光照阶跃变化以及负载投切时,均有短暂暂态过程,随后迅速进入稳态。
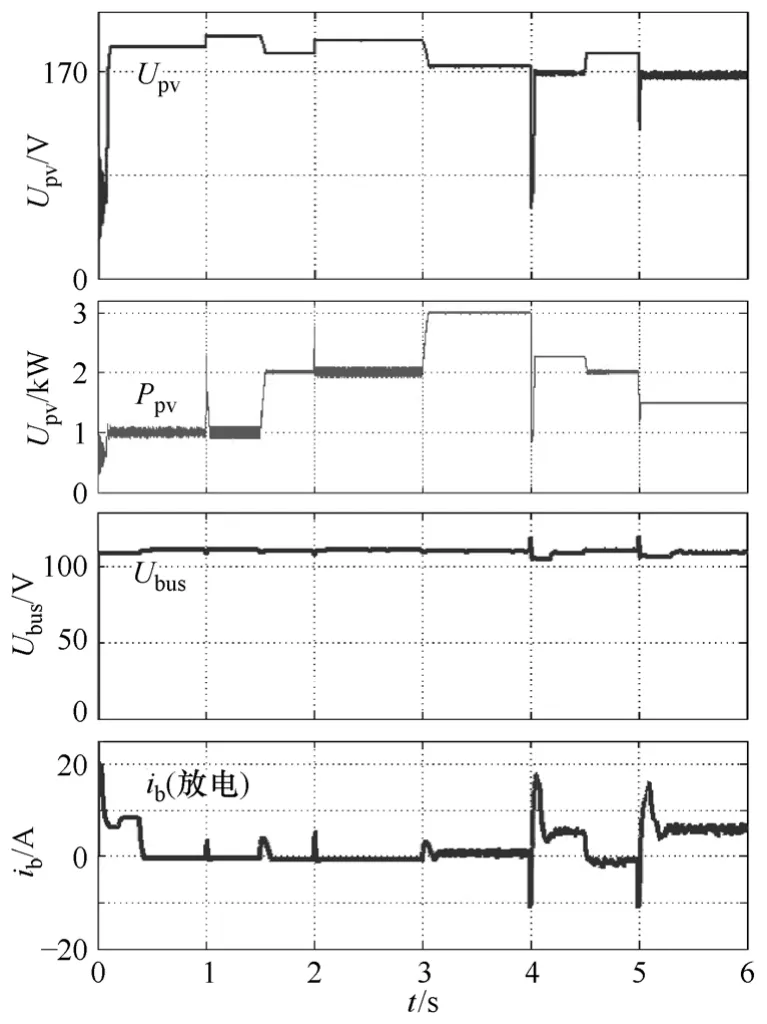
图6 统一能量控制策略下PV电压及功率、母线电压及蓄电池充放电流波形Fig.6 Waveforms of PV voltage and output power, bus voltage and battery current under the unified energy control strategy
同时对比图2发现,稳定的 Upv均处于最大功率点电压(含 170V)右侧,能确保 Buck-Boost电路高效、可靠工作。
6 结论
本文提出了在独立光伏发电系统中采用带 PV最优工作点追踪功能的统一能量控制策略,即对负载获取功率、蓄电池充放电和 PV输出功率进行统一控制,不使用传统控制模式切换技术,简化了算法,易于实现。
[1]Coppez G, Chowdhury S, Chowdhury S P. The importance of energy storage in renewable power generation: a review[C]. Universities Power Engineering Conference, New Zealand, 2010: 1-5.
[2]Shayani R A, Oliveira, M A G. Global performance measurement of a stand-alone photovoltaic system[C].Transmission and Distribution Conference and Exposition, Latin America, 2006: 1-6.
[3]张超, 何湘宁. 非对称模糊 PID控制在光伏发电MPPT中的应用[J]. 电工技术学报, 2005, 20(10):72-75.Zhang Chao, He Xiangning. The application of asymmetric PID control in MPPT of PV generation[J].Transactions of China Electrotechnical Society, 2005,20(10): 72-75.
[4]傅诚, 陈鸣, 沈玉樑, 等. 基于输出参数的光伏电池最大功率点控制[J]. 电工技术学报, 2007, 22(2):148-152.Fu Cheng, Chen Ming, Shen Yuliang, et al. A control method of maximum power point based on output parameters[J]. Transactions of China Electrotechnical Society, 2007, 22(2): 148-152.
[5]杨水涛, 张帆, 丁新平, 等. 基于输入—输出参数的光伏电池最大功率控制的比较[J]. 电工技术学报,2009, 24(6): 95-102.Yang Shuitao, Zhang Fan, Ding Xinping, et al.Comprehensive research on the photovoltaic maximum power point tracking based on input parameters or output parameters[J]. Transactions of China Electrotechnical Society, 2009, 24(6): 95-102.
[6]任柱, 陈渊睿, 张淼. 独立光伏系统中蓄电池充电控制策略[J]. 控制理论与应用, 2008, 25(2): 361-363.Ren Zhu, Chen Yuanrui, Zhang Miao. Battery charge control strategy in stand-alone photovoltaic system[J].Control Theory & Applications, 2008, 25(2): 361-363.
[7]Weichen L, Yuzhen Z, Wuhua L, et al. A smart and simple PV charger for portable applications[C].Applied Power Electronics Conference and Exposition, America, 2010: 2080-2084.
[8]吴理博, 赵争鸣, 刘建政, 等. 独立光伏照明系统中的能量管理控制[J]. 中国电机工程学报, 2005,25(22): 68-72.Wu Libo, Zhao Zhengming, Liu Jianzheng, et al. A novel energy management and control for stand-alone photovoltaic lighting system[J]. Proceedings of the CSEE, 2005, 25(22): 68-72.
[9]廖志凌, 阮新波. 一种独立光伏发电系统双向变换器的控制策略[J]. 电工技术学报, 2008, 23(1):97-103.Liao Zhiling, Ruan Xinbo. Control strategy for bi-directional DC-DC converter of a novel standalone photovoltaic power system[J]. Transactions of China Electrotechnical Society, 2008, 23(1): 97-103.
[10]Thammasiriroj W, Nuchkrua T, Ruayariyasub S.Sliding mode control for stabilizing DC-link of DC-DC converter in photovoltaic systems[C]. Power Electronics for Distributed Generation Systems, Hefei,2010: 347-351.
[11]Villalva M, Gazoli J, Filho E. Comprehensive approach to modeling and simulation of photovoltaic arrays[J]. Transactions on Power Electronics, 2009,24(5): 1198-1208.
[12]Saiju R, Heier S. Performance analysis of lead acid battery model for hybrid power system[C].Transmission and Distribution Conference and Exposition, America, 2008: 1-6.
猜你喜欢
能源工程(2020年6期)2021-01-26 00:55:22
山东冶金(2019年3期)2019-07-10 00:54:04
消费导刊(2018年10期)2018-08-20 02:57:02
汽车维修与保养(2017年1期)2017-05-15 02:40:16
汽车维修与保养(2016年1期)2016-09-07 08:33:04
通信电源技术(2016年1期)2016-04-16 04:57:26
汽车维修与保养(2016年12期)2016-03-14 06:37:10
汽车维修与保养(2016年11期)2016-02-21 08:04:06
电测与仪表(2015年4期)2015-04-12 00:43:06
电测与仪表(2015年5期)2015-04-09 11:30:46
