
模块化直流电源系统CAN网络的设计与实现
2011-07-02 10:46:14段善旭史晏君胡国珍
电工技术学报 2011年1期
李 锐 蔡 涛 段善旭 史晏君 胡国珍
(华中科技大学电气与电子工程学院 武汉 430074)
1 引言
模块化是开关电源的发展趋势,被公认为当今电源变换技术发展的重要方向之一。模块化电源具有控制灵活、扩容方便及高效冗余等优点。用户可以根据不同负荷的需求,通过串并联组合灵活配置电源系统的输出电压和功率,极大扩展了系统的工作范围和应用领域[1-4]。
模块化电源系统中,多个模块的协调控制以及系统的统一管理是十分重要的。相当多的商用产品采用 CAN总线通信方式实现多模块串联或并联控制,然而支持的模块数量通常较少,且控制上大多针对整个系统进行总体控制[5-7]。本文研制的系统通过 CAN网络可以实现对多个串并联模块的分组和统一控制,从而实现更为灵活的控制策略。CAN网络还实时监测各个模块的运行状态,采取合理的故障处理措施,提高系统运行的可靠性和稳定性。同时,由于模块化系统中模块数量较多,电磁环境显得更为复杂,为了保证系统正常运行,CAN网络的电磁兼容能力显得格外重要。已有较多文献介绍了CAN网络抗干扰的相关设计,所提的方法措施也有很多种。如前级加光耦隔离、配置匹配阻抗及总线上采用RC或者LC滤波等[8-9]。然而没有具体分析采取这些措施的原理、CAN总线通信错误的根本来源和具体的错误机制,也相对缺少具体参数选取的理论推导。本文以模块化直流电源系统为应用背景,从CAN总线的仲裁机制出发,分析CAN通信机制中位定时的概念,阐述了 CAN通信错误的根本来源,并以这种错误机制为指导,相对应的从匹配阻抗、滤波电容和总线拓扑等方面提出了抑制电磁干扰的一些设计原则,并给出了参数选取的计算公式。最后通过系统实验证明了本文所设计的CAN网络在模块化直流电源系统中可以稳定可靠的工作。
2 电源系统CAN网络结构及群控策略
2.1 系统结构
本文研究的模块化直流电源系统结构框图如图1所示。系统的下层结构是由m个模块串联为一组,然后n组并联组成,上层由上位机和监控屏组成。上下层之间通过 CAN网络互相联系,下层每个模块接受本地控制的同时,也受到来自上位机的调控。上位机通过 CAN网络实时收集各个模块的电压电流等状态信息,判断出系统目前所处的状态,由此给出相应的指令,对整个系统进行监测和管理。

图1 系统结构图Fig.1 The system structure
2.2 群控策略
从图1中可以看出,系统模块数较多且串并联结构复杂,为了保证系统稳定可靠的工作, CAN网络的监控功能显得十分重要。图2为上层控制流程图,图中采用有限状态机描述方式。从图2中可以发现,当模块数量很多时,整个系统的信息量是十分庞大的。系统若采用单播方式一方面会带来CAN总线负荷过重,从而使低优先级节点始终无法获得发送权;另一方面判断大量收发地址会带来较大计算负担,影响通信的实时性。鉴于此,本文设计的系统在 CAN通信中充分利用多播功能,缓解通信负荷过重的压力。
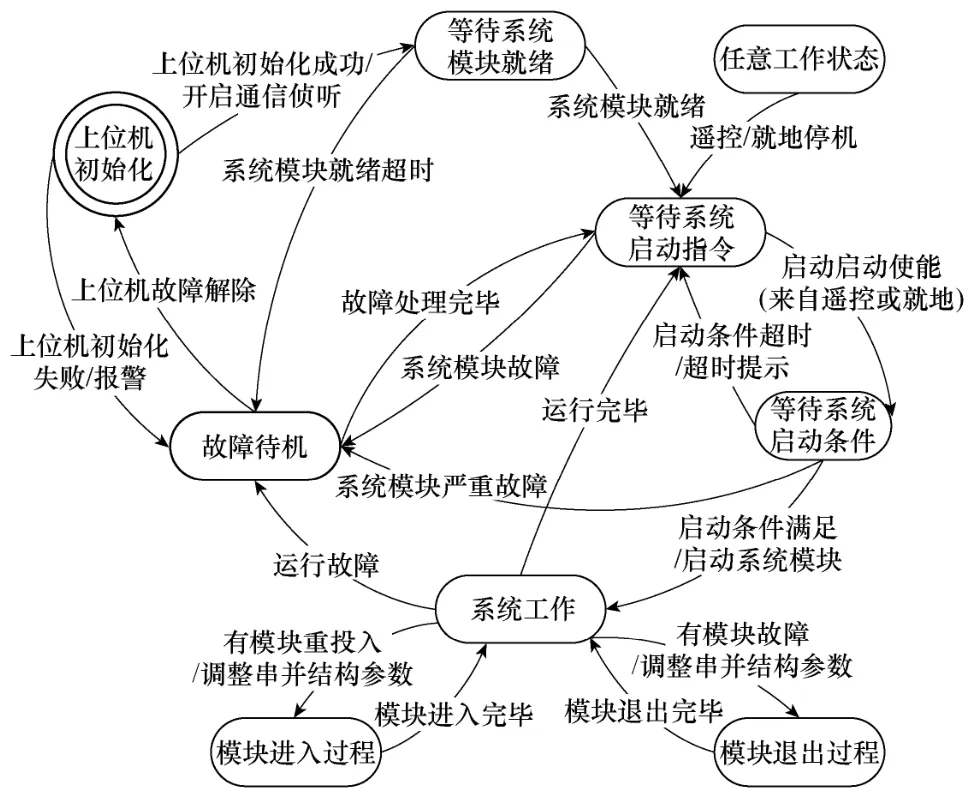
图2 系统控制流程图Fig.2 System control flow chart
本系统 CAN网络报文采用扩展帧格式,保证足够的冗余设计,可以满足系统的扩容要求。同时本系统通信协议中通过对标识符各位进行相应的定义,设置单播、组播和广播三种信号传输方式。单播是对单个模块进行控制,组播对同组所有模块进行控制,广播则是对系统全体模块发送命令。每个CAN节点同时配置有3个接收缓冲器,分别响应单播、组播和广播的信息。表1显示了标识符各位含义的说明。
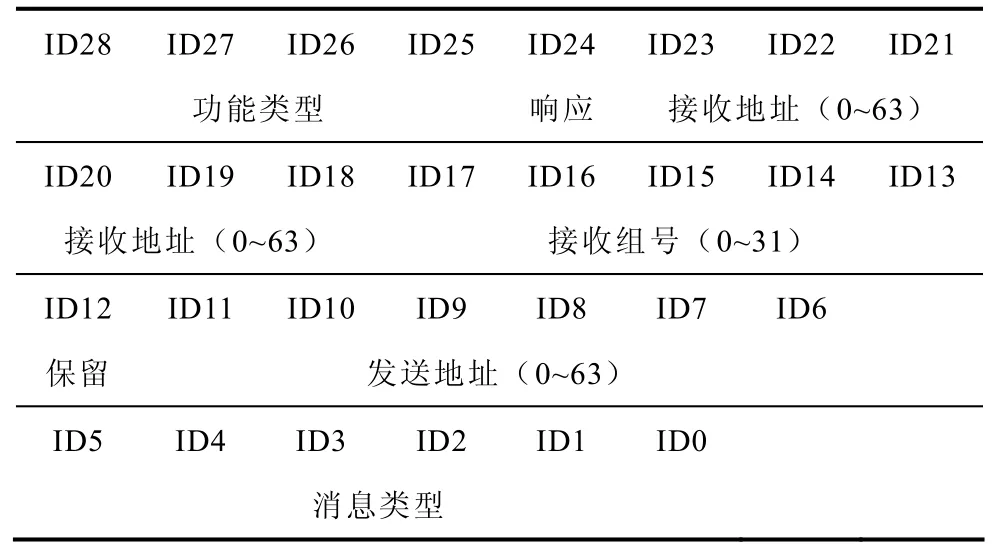
表1 CAN报文标识符定义Tab.1 CAN message identifier definition
系统在每次开机前,可通过手动拨码或上位机分配来给每一个模块分配一个ID号,这个ID号中包含了每一个模块的地址和组号等信息,这样每一个模块和组都可以通过单独的寻址找到。上位机的一些重要的全局命令信息等可以通过广播发送,一些范围查询和命令信息等可以通过组播寻找相应的多组模块,一些特殊的信息如单个模块的故障报警信号可以通过单播发送。通过这3种通信方式,可以十分灵活的配置模块的组合,实现了从单台模块到整个系统的全范围控制。
3 复杂电磁环境下CAN网络设计
3.1 CAN总线通信错误机制分析
CAN总线由CANH和CANL两条平行传输线组成,图3为输出CANH和CANL线上电平和对应的位值,输出信号为差分信号,分为隐性电平和显性电平两种。需要注意的是,隐性电平范围是-1~0.5 V,显性电平范围是0.9~5V。
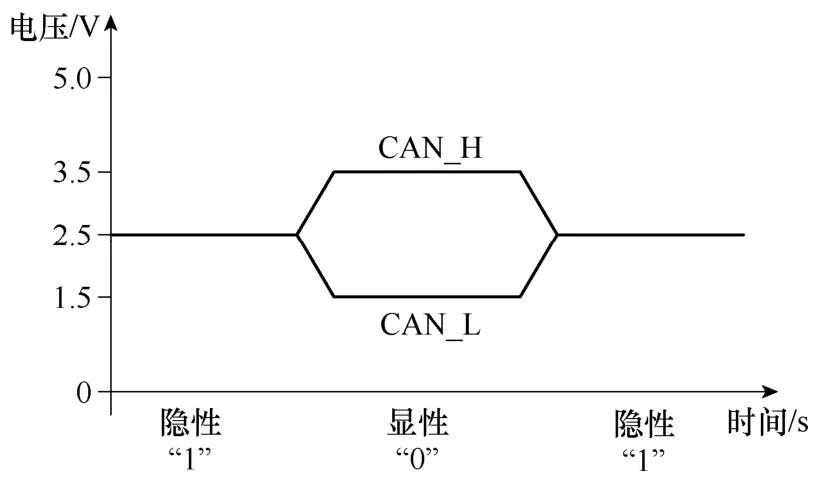
图3 CAN总线电平和对应逻辑Fig.3 CAN-bus level and corresponding logic
基于这种差分输出的特性,CAN总线采用了一种“载波检测,多主掌控/冲突避免(CSMA/CA)”的通信仲裁方式。各节点在向总线发送帧的同时会对总线的电平进行监测,当总线电平与发送电平一致时,节点继续发送帧的下一位,否则节点退出发送,而载波检测的结果与每一位的采样点直接相关。如图4所示,一位的时间分为四个片段:同步段、传播段、相位缓冲段1和相位缓冲段 2,采样点在相位缓冲段1的末尾。通信时若发生相位错误,可以调整延时段长度来改变采样点的位置,弥补产生相位错误时的误差[10]。然而当延时、干扰或者其他原因导致相位错误很大,以致超出采样点的调整范围,或者采样点处波形畸变程度过大时,数据便产生了一个错误,这个是CAN通信错误的根源。
3.2 匹配电阻、滤波电路和总线拓扑设计原则
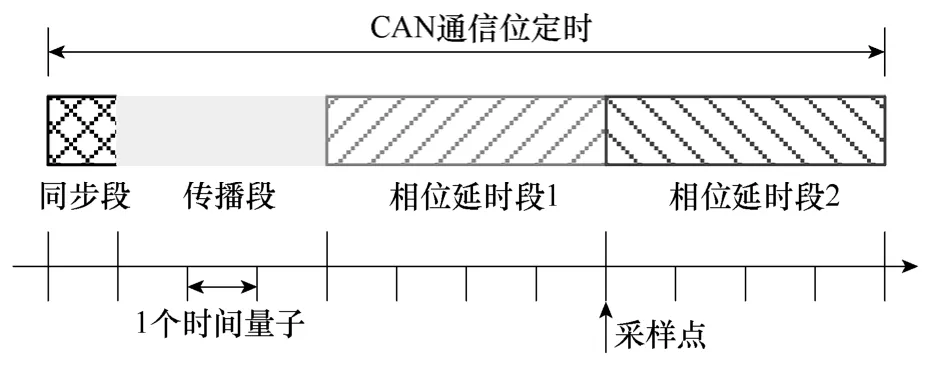
图4 CAN总线位定时Fig.4 CAN-bus bit time
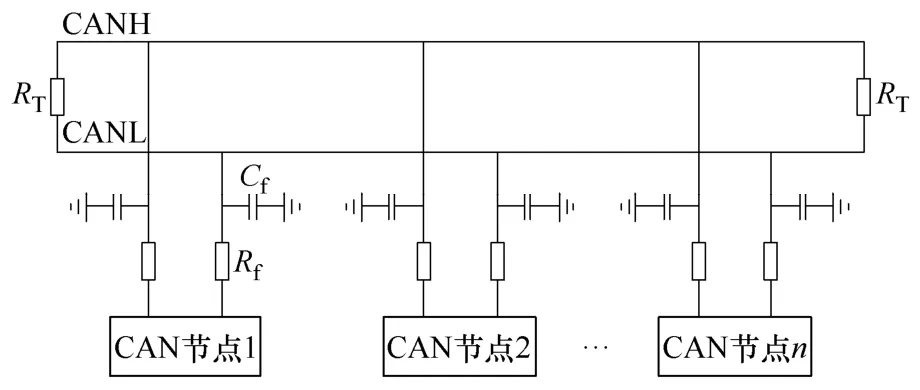
图5 CAN网络结构Fig.5 CAN-bus structure
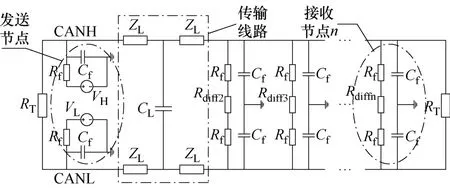
图6 CAN网络等效电路模型Fig.6 CAN-bus equivalent circuit
CAN网络结构如图5所示,采用总线拓扑,主要由 CAN网络节点、滤波装置、传输线路和终端阻抗组成。CAN网络等效电路模型如图6所示,图中RT为终端电阻,Rdiffx为节点的差分电阻,Rf和Cf是滤波电阻电容,VH、VL分别是发送节点CANH和CANL输出电平,ZL、CL是线路的分布参数。网络中节点分为发送节点和接收节点,一般发送节点只有一个,其余为接收节点;均匀传输线的分布参数主要有单位长度上的电阻电感以及两线之间的电容,因此可以用如图5所示的H型等效电路来描述。终端电阻RT有两个作用:一是匹配传输线的特征阻抗防止信号反射,二是作为 CAN驱动芯片的负载支撑总线电平。另外对于电磁干扰较为严重的场合,通信节点的输出部分还要加上一些滤波措施,如RC滤波、共模扼流圈等。
通信过程中,当网络终端阻抗与传输线特征阻抗不匹配时,就会发生信号的反射。当发生反射时,传输线上信号是入射波和反射波的叠加,引起信号波形的畸变,对通信带来不利的影响。系统 CAN网络传输线特征阻抗约为120Ω,因此在总线首末两段各并联一个 120 Ω的匹配阻抗,首端节点作为发送节点,改变 CAN网络末端匹配阻抗的个数可以看到信号反射的不同波形。图7所示为不同匹配阻抗下系统 CAN网络信号的波形,测试点为末端节点。可以看到当总的匹配阻抗减小时,输出显性电平的幅值下降,这与驱动芯片的带载能力相关。并且阻抗不匹配时,信号反射现象变的更加明显。
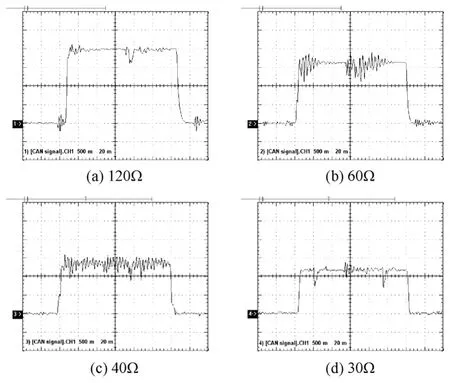
图7 末端不同匹配阻抗下CAN总线上信号波形Fig.7 The signal of the CAN-bus at different end matching impedance
反射波与入射波之间的关系可以用反射系数来描述:

式中,ρ为反射系数;ZC为传输线的特征阻抗;Z2为终端阻抗。根据图6所示电路模型,由于本系统CAN驱动芯片采用的是 Philips公司生产的PCA82C250芯片,节点差分电阻Rdiff最小为20 kΩ(远大于RT),因此可以忽略Rdiff的影响。以图7b为例计算,其末端阻抗为60Ω,按式(1)计算可以得到反射系数为-1/3。从图中可以看到在隐性电平转化为显性电平时发生了信号反射,此时入射信号的幅值为1.8 V,计算得到反射信号为-0.6 V,实际这个信号向下波动幅值约0.55 V,与理论计算基本吻合。网络首端反射系数近似为零,基本没有反射波。
实验说明当匹配阻抗与特征阻抗差异越大时,信号反射越严重,波形畸变程度越高,甚至于超出了显性电平或隐性电平的范围,这时容易导致CAN通信错误。匹配阻抗总体值越小,显性电平幅值越小,抗干扰的能力也越差。因此匹配阻抗应等于传输线特征阻抗防止信号反射,同时匹配阻抗最好只在网络首末两端各加一个,使传输线上显性电平尽可能高,增加抗干扰能力。
模块化直流电源系统中每一个模块都是一个干扰源,开关器件的动作会带来强烈的电磁干扰。干扰会造成通信错误,随着模块数增多,干扰会变得更加严重,甚至使 CAN节点直接关闭。为了解决上述问题,可以在通信节点加入 RC滤波电路滤除高频干扰。然而滤波电容的加入增加了信号延时,滤波电阻的加入会导致总线上显性电平的衰减,因此滤波参数的选择十分重要。
根据图 6模型,设首端节点输出差分电压为Vdiff1=VH-VL,末端节点接收到的电压幅值为Vdiffn,网络中共有n个节点,那么Vdiffn计算公式如下

从式(2)可以看出,随着 Rf的增加、线路的延长和节点数的增多,会导致末端节点电平衰减更为严重。因此Rf的取值一般很小。设RL值为3.2Ω(长500 m的屏蔽双绞线),Rdiffn最小值为20kΩ,设节点数共有100个,RT按照120Ω计算。输出Vdiff1最小值为1.5 V,而Vdiffn最小值为0.9 V才会被辨认为显性电平,又由于Rdiffn远大于Rf,公式中后一项可近似为 1,那么按照式(2)计算可以得到 Rf最大不能超过7Ω,随着节点数增多和线路增长,这个值要进一步减小。本系统中Rf值选取5.1Ω。
Cf的选取要考虑延时的影响,由于RC回路电容充放电时间可以按照式(3)来进行计算

式中,V1为终止电压;V0为初始电压;Vt为时刻 t的电容电压。按照上述条件考虑节点数和线路参数,从图6中可以看出首端到末端经过了三级RC滤波,由此可以估算出末端接收节点电容充电时间tslopen
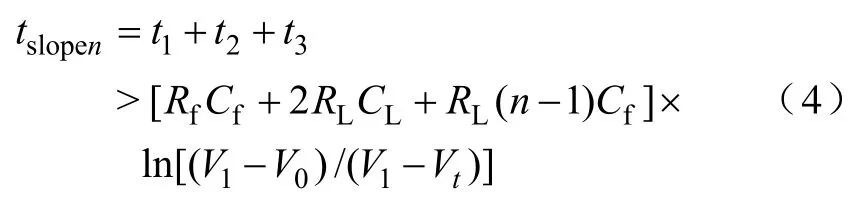
此时 V1为 3.5V,V0为 2.5V,考虑到 CANH和CANL完全对称,那么 Vt为 2.95V,再根据前面所述同步跳转宽度的补偿范围为 4tq,那么 Cf的取值至少要满足tslopen<4tq,按照250 Kbit/s的通信波特率带入式(3)后,计算可以得到Cf应小于4.6nF,系统实际选取30pF的滤波电容。从式(4)中可以看到延时的大小与线路长度和节点数有关:线路越长节点数越多则延时越大。这样通信的波特率就受到了限制。滤波电容越大,正常通信所要求的tq也越大,那么波特率就越低。
通信网络中总线拓扑的影响也非常重要。本系统采用的是总线型拓扑,构建总线拓扑时需要非常注意实际的走线布局,各节点连接到总线上的引线应该尽可能短,最好是直接串接在总线上。因为引线过长,信号传输到各个节点与总线的交汇点时,会将分支的节点也看作是一个“终端”,而这个“终端”上没有匹配电阻而被视作开路,这就造成比较严重地信号反射。
4 实验结果
为验证本文方法的有效性,进行系统实验验证,本文实验平台是由八个模块串并联组成的直流电源系统。CAN网络两个终端各并联一个120 Ω终端电阻,各个节点直接串联在总线上,针对系统启动前后以及是否加入滤波电路进行对比实验。图8所示为系统启动前 CAN网络上信号波形,启动前由于各个模块开关器件没有动作,电磁干扰较小,滤波电路是否加入对此时通信信号的波形影响不是很大,CAN通信过程正常。图9显示的是系统正常工作时加入滤波电路前后 CAN网络上信号波形,可以看到加入滤波电路前信号上干扰十分明显,此时CAN通信频繁出错。加入滤波电路后干扰尖峰和信号反射得到了很好的抑制,信号在传输过程中没有
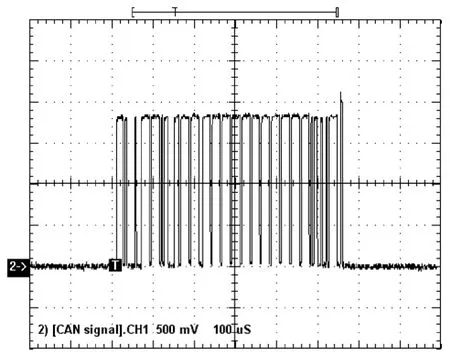
图8 系统启动前CAN总线信号Fig.8 CAN-bus signals before the system starts
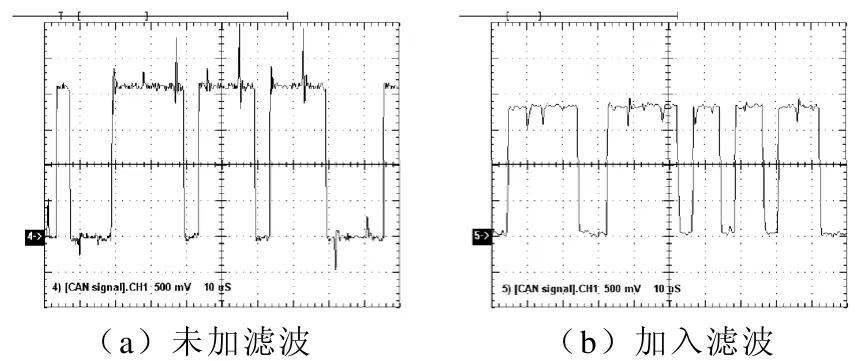
图9 系统工作时的CAN总线信号Fig.9 CAN-bus signals when the system working
出现丢失或校验错误等情况。系统工作过程良好,输出电压精度为2%,电流精度为3%,达到了预期的效果。
5 结论
模块化直流电源系统对于提高系统的冗余性和适应范围具有十分重要的作用。本文利用 CAN的多播功能,制定了适应单播、组播和广播的通信协议,通过上层 CAN网络的远程控制和各个模块的本体控制的相互结合,实现了对系统灵活的分组控制。另外针对多模块串并联系统中 CAN网络容易受到电磁干扰的问题,本文以 CAN总线仲裁机制和位定时概念为基础,详细分析了 CAN通信错误机制的根源,并具体分析计算了信号反射和滤波参数的影响,给出了 CAN网络设计上的一些原则,实验证明这些措施是行之有效的。
[1]Manias S N, Kostakis G. Modular DC-DC convertor for high-output voltage applications[J]. IEEE Proceedings of Electric Power Applications, 1993, 140(2):97 -102.
[2]Ayyanar R, Giri R, Mohan N. Active input-voltage and load-current sharing in input-series and output-parallel connected modular DC-DC converters using dynamic input-voltage reference scheme[J].IEEE Transactions on Power Electronics, 2004, 19(6):1462-1473.
[3]Chen Wu, Ruan Xinbo, Yan Hong, et al. DC-DC conversion systems consisting of multiple converter modules: stability, control, and experimental verifications[J]. IEEE Transactions on Power Electronics, 2009, 24(6): 1463-1474.
[4]Palma L, Enjeti P N. A modular fuel cell, modular DC-DC converter concept for high performance and enhanced reliability[J]. IEEE Transactions on Power Electronics, 2009, 24(6): 1437-1443.
[5]王晓寰, 张纯江, 顾和荣, 等. 现场总线控制的单相逆变电源并联系统[J]. 电工技术学报, 2007,22(10): 109-112.Wang Xiaohuan, Zhang Chunjiang, Gu Herong, et al.Control of paralleled single phase inverters based on CAN bus [J]. Transactions of China Electrotechnical Society, 2007, 22(10): 109-112.
[6]罗玉涛, 张智明, 赵克刚. 一种集散式动力电池组动态均衡管理系统[J]. 电工技术学报, 2008, 23(8):131-136.Luo Yutao, Zhang Zhiming, Zhao Kegang. A novel distributed equilibrium and management system of dynamic battery Pack[J]. Transactions of China Electrotechnical Society, 2008, 23(8): 131-136.
[7]王晋, 周理兵, 马志云, 等. 多相永磁无刷直流电动机系统设计与协调控制 [J]. 电工技术学报, 2008,23(1): 53-59.Wang Jin, Zhou Libing, Ma Zhiyun, et al. System design and coordinated control of a multiphase permanent magnet brushless DC motor [J].Transactions of China Electrotechnical Society, 2008,23(1): 53-59.
[8]宫学庚, 梁枫, 马宇坤, 等. 基于 CAN总线的电动客车用分布式电池管理模块[J]. 电源技术, 2009,33(10): 899-902.Gong Xuegeng, Liang Feng, Ma Yukun, et al.Distributed battery management module based on CAN bus for electric bus [J]. Transactions of China Power Sources, 2009, 33(10): 899-902.
[9]丁峰. 汽车 CAN总线研究分析与干扰防范[J]. 微计算机应用, 2007, 28(5): 497-501.Ding Feng. Channel analysis and precaution of interferences exist in CAN-bus[J]. Microcomputer Applications, 2007, 28(5): 497-501.
[10]Florian H, Armin B, Robert B G. The configuration of the CAN bit timing[C]. The 6th International CAN Conference, Turin(Italy), 2005.
猜你喜欢
海洋信息技术与应用(2022年1期)2022-06-05 07:38:22
现代装饰(2020年5期)2020-05-30 13:01:56
中国核电(2017年2期)2017-08-11 08:00:56
流程工业(2017年4期)2017-06-21 06:29:50
电测与仪表(2016年22期)2016-04-12 00:19:58
西部广播电视(2015年5期)2016-01-16 03:45:07
电子工业专用设备(2015年4期)2015-05-26 09:10:33
电测与仪表(2015年2期)2015-04-09 11:28:58
电测与仪表(2014年7期)2014-04-04 12:09:32
电波科学学报(2011年4期)2011-05-29 01:20:15
