
基于FPGA的脉冲雷达成像研究与实现
2011-06-22 12:46李宏波
火控雷达技术 2011年3期
李宏波 李 浩 张 可
(电子科技大学 成都 611731)
1 引言
航海雷达是航海导航系统中不可缺少的一部分。显示器作为雷达信息的直接反应,显示效果的好坏往往直接影响着雷达效果和船只安全。
现代雷达显示器一般采用光栅扫描(直角坐标)的LCD显示器,而雷达回波信号一般是极坐标形式。要精确实时的对雷达视频信号进行显示,最重要的就是将极坐标在高速采样中精确而又快速的映射到直角坐标。对于有些远距离目标,船用雷达受限于分辨率,回波比较少(一个像素点),体现在LCD上时容易被操作人员所忽视。所以对雷达目标图像进行必要的展宽是十分必要的。
2 目标展宽
在雷达系统中,由于目标各区域对电磁波反射效果的不一致,雷达成像时在图像上会体现为目标存在细微的空心、裂纹现象。器上形成较明显的图像。基于此有必要而对于距离较远的目标,雷达受限于分辨率,得到的反射回波脉冲较少,难以在显示对雷达回波图像进行一定的展宽。
2.1 目标展宽原理
在图像处理中多采用数学形态滤波来对图像进行膨胀和腐蚀,这里可以将形态滤波引入雷达图像处理以实现对雷达目标的展宽。形态学滤波的基本定义有腐蚀和膨胀两种:
其中A是待处理图像矩阵,B为滤波矩阵,是用来处理图像的矩阵算子。B对A腐蚀所产生的图像是这样的点(x,y)的集合:如果B的原点位移到点(x,y),则B将完全包含于A中。腐蚀在数学形态学中的作用是消除物体边界点,使边界向内部收缩,把小于结构元素的物体去除。选取不同大小的结构元素,可以去除不同大小的物体。
即B对A膨胀产生的图像是由这样的点(x,y)组合的集合:如果B的原点位移到(x,y),则其与A的交集非空。膨胀在数学形态学中的作用是对物体边界点进行扩充,使边界向外部扩张。膨胀可有效填补图像分割后物体中的空洞。
为了取得理想的处理效果,常见的运算可能是膨胀和腐蚀的组合运算,包括:
开运算:A·B=(AΘB)⊕B
闭运算:A ◦B=(A⊕B)ΘB
2.2 雷达目标展宽
脉冲雷达的回波为极坐标,而显示是以直角坐标的形式。这里需要注意的是对雷达目标的展宽是基于极坐标还是直角坐标的问题。选择的依据包括:实现难易程度、形成的滤波矩阵内所有元素的相关性。因为雷达回波是极坐标,所以一个目标的反射回波只会存在于相邻的极坐标(r,θ)中,即同一个目标反射回来的若干个有效极坐标中(r1,θ1)、(r2,θ2)、(r3,θ3)…中 r,θ 的值都是相邻的,如果目标展宽是基于极坐标则保证了待滤波矩阵中元素的相关性。而且基于极坐标进行目标展宽时,雷达的一次回波形成待滤波矩阵A的一行元素,方便实现。
滤波矩阵B可以根据实际需求构造不同的滤波矩阵。如要实现雷达目标3*3范围的膨胀,则需要构造一个全‘1’的3*3矩阵B。
3 坐标转换
常见雷达回波信号为极坐标形式,坐标位置通过(r,θ)来表示。显示器显示信号为直角坐标通过(x,y)来表示。极坐标转换为直角坐标的基本关系:

3.1 坐标变换的问题
极坐标到直角坐标的转换过程实际上是映射的关系。在固定大小的平面内,直角坐标点的个数是固定的,而极坐标则根据角度与半径的不同存在很大差异,因此这种映射不是一一对应的关系,从而导致了重点和漏点。
3.1.1 重点
在雷达扫描线数量确定的情况下,距扫描中心较近的位置存在多个极坐标映射到一个直角坐标的情况即重点。可以通过以下两种方法进行处理:
a.在计算的时候对映射到一个直角坐标点的若干个极坐标进行选择,只选择一个极坐标的映射是有效的,其它的映射为无效。这样保证了坐标映射的唯一性,但是抛弃了较多雷达目标回波信息。
b.不进行选择,在坐标变换过程中,后得到的直角坐标直接覆盖旧的直角坐标。这种方法易于实现,并且在一定程度上保证了目标信息的完整性。
3.1.2 漏点
在距扫描中心较远位置的直角坐标存在没有极坐标向它映射的情况。这就导致屏幕上的某些点是永远达不到的漏点,如图1所示。
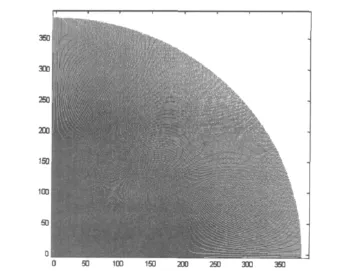
图1 直接坐标变换漏点图
图中白色部分为漏点。决定漏点的因素有两个:雷达扫描一周产生扫描线的条数(角度量化数n)、雷达扫描半径(r)。在r最大的位置,漏点是最多的。如果在r最大的位置两条扫描线的间隔小于直角坐标的最小间隔即满足式(2)可以认为在当前角度量化和扫描半径下没有漏点。

基于式(2)可采用增加角度量化数的方法来防止漏点。
3.2 坐标转换方法比较
在实际应用中,常用的坐标转换方法有如下几种。
直接计算法:根据变换的基本原理,预先存储了可能用到的sinθ,cosθ的值。每一点的坐标只需要计算乘法则可以得到变换后的直角坐标。这个方法在实际中往往采用硬件电路来实现。涉及的计算量较大且只能单独计算坐标变换,当角度量化数与扫描半径不满足式(2)时不能避免漏点的存在。优点是此方法所用存储空间很小。
计数法:因为直角坐标都是整数,且在方位角一定的时候,当前点与上一点坐标(x,y)的变化量只有0、1两个值,根据这一特点,可以将各点相对前一点的进位信息进行储存。这种方法在使用少量存储空间的情况下大大提高了计算速率。缺点同直接计算法一样都不能处理坐标变换中漏点的问题。
查表法:查表法存储了每一个极坐标(r,θ)对应的直角坐标(x,y)。对极坐标变换时直接使用(r,θ)对存储空间进行寻址。这种方法的每一个直角坐标点都在之前进行了精确的计算从而避免了误差,而且变换过程只需要寻址时间,保证了变换的速度。但是所用存储空间较大并且不能避免漏点问题。
3.3 优化查表法
3.3.1 优化查表法原理
优化查表法的核心思想是一次寻址根据实际情况得到一个或多个直角坐标的值。
在角度量化数n和扫描半径r确定的情况下,极坐标(r,θ)是固定的,根据式(1)可知直角坐标(x,y)也就确定了。完全可以预先知道显示器上的哪些坐标是重点或漏点。
传统查找表的内容为的二维数组,每一个数组通过(r,θ)的编码寻址。但是无法避免漏点情况。为了去掉漏点,可以将该点临近的点的目标灰度值赋值给它。如图2左所示。‘0’表示有0个极坐标映射到此直角坐标,‘1’表示有1个极坐标映射到此直角坐标。
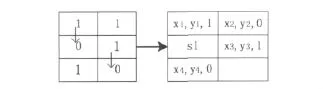
图2 优化查表法补漏点示意图
在实际应用中需要在存储空间内定义一个三维数组(x,y,add)来满足查表需求。其中(x,y)为极坐标点按公式(1)变换而成的极坐标,其中add为反映该直角坐标点需要补点的情况。如图2所示。当极坐标寻址到(x1,y1,1)时,首先得到(x1,y1),再通过附加信息‘1’得到漏点位置s1的坐标(x1,y1+1),两点的雷达目标灰度值同。根据附加信息的不同,可以完成临近多个位置的补漏点。
3.3.2 利用对称性减少存储量
现代雷达的角度量化数和数据采样量都是很大的。这就表示坐标变换所需要的查找表所用存储空间也很大,以角度量化数为2048、扫描半径为384计算。查找表的大小至少为15Mbit。根据直角坐标系的对称性和极坐标角度的均匀分布,可以大幅减少查找表的存储量。从图3可知,只需要在查找表中存储0~45°范围内极坐标对应的直角坐标,就可以根据直角坐标系的特点通过简单的运算得到其它角度的直角坐标值。而需要的存储空间只是原来的八分之一。

图3 坐标变换的对称性
4 雷达成像的FPGA实现
现场可编程逻辑门阵列(FPGA)作为一种半定制集成电路,因为它开发周期较短、并行、高速的特点而广泛的应用于各种系统设计中。为了便于说明形态算法在FPGA上的实现方案,本文以4×4算子B处理384×N的雷达回波数据矩阵A为例进行硬件设计实现。对应的坐标变换参数为:角度量化数2048,扫描半径384。
雷达成像的FPGA实现RTL图如图4所示,其中主要功能模块包括滤波矩阵产生、形态滤波、读LUT和坐标变换控制一共四个部分。
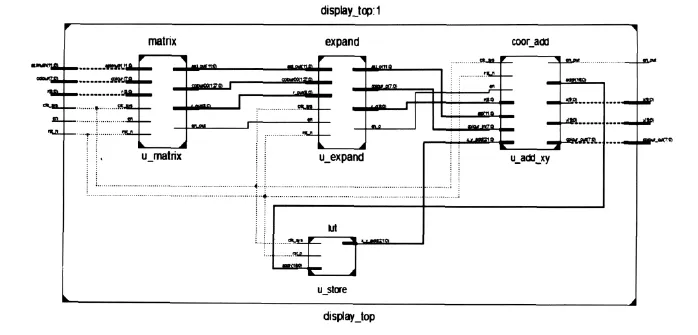
图4 总体设计RTL图
雷达回波数据的每一条扫描线数据都相隔一定的时间,并且每次接收到的数据仅为一条扫描线,即是待处理矩阵A的一行数据。要形成矩阵必须集合4条扫描线形成可以进行滤波的矩阵。这里需要定义4个存储空间来缓存雷达的4次回波数据,定义16个寄存器来寄存待处理矩阵得16个元素。随着数据流的输入,它们都是即时更新的。
形态滤波与信号处理中的其它滤波运算不同的是它没有复杂的乘加运算,只有比较、选择两种运算。随着待运算矩阵A的实时更新,只需要将它与矩阵B进行比较并选择A中满足条件的元素作为输出。对本设计所做的目标展宽来说,B为全‘1’矩阵,只要A中任意一个元素为目标,则输出点为目标。
坐标变换程序状态图如图5,包括读取查找表存储区域中相应直角坐标和同时对漏点进行补充。每读取缓存中的一组坐标、灰度数据,得到的输出根据缓存坐标的不同可能得到一个或两个输出坐标即补漏点过程,当输出两个坐标时,这两个直角坐标的灰度都为当前从缓存中取出的灰度值。
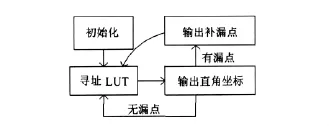
图5 坐标变换状态图
5 结果验证
验证雷达扫描半径为384,角度量化数为2048,查找表的存储采用DDR3。采用FPGA芯片为Spartan6-XC6SLX45。其中查找表的建立采用MATLAB实现,查找表寻址范围为0~45°,每一个极坐标对应22bit。其中20bit用来表示x和y,2bit用来表示补漏点信息。所用存储空间为1.93Mbit。坐标变换的效果图如图6所示。可见在雷达图像显示区域内没有漏点存在,提出的优化查找表方法实现了快速准确的坐标转换。
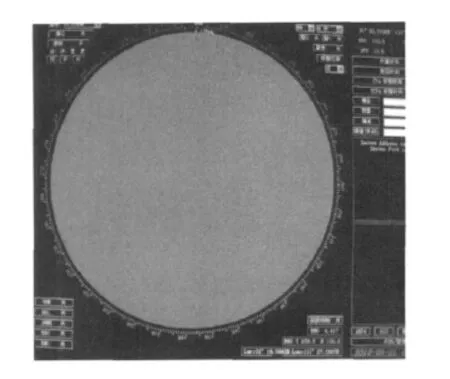
图6 坐标变换验证
目标展宽效果图如图7所示。左图为未进行目标展宽的雷达图像,右图为经过本文方法处理过后的雷达图像。对比两幅雷达成像图,可以看见经过处理过后的雷达图像修补了原图中的细小裂缝,雷达小目标得到了明显放大。

图7 目标展宽效果对比
6 结束语
本文重点研究了脉冲雷达成像中的坐标变换算法,在分析已有方法的基础上提出了改进算法。利用FPGA平台对目标展宽和坐标转换两算法进行了实现。在使用少量FPGA资源的情况下实现了算法的高速、实时运算。
[1]周雪峰,柳晓鸣,索继东.雷达模拟显示系统坐标转换的算法与软件实现[C].中国航海学会通信导航专业委员会学术年会,2007:40-45.
[2]范多亮.雷达显示终端中的死点分析[J].信息化研究,2010,36(3):13-15.
[3]宋博文.基于FPGA实现雷达信号处理和图像显示的算法研究[D].大连海事大学,2007.
[4]李荣忠,毕德仓,尹祺巍,刘智深.基于查找表的激光雷达图像快速绘制算法[J].地理空间信息,2009,07(05):54-56.
[5]吴时兰,钱盛友.基于广义形态滤波的图像去噪方法研究[J].通信技术2010,12(43):138-140.
[6]王海虹,曾妮等.基于小波变换和数学形态学的激光成像雷达图像边缘检测[J].中国激光,2008,35(6):903-906.
[7]刘翠海,王文清,袁满.一种支持雷达P显仿真的实时坐标变换策略[J]系统仿真学报,2002,14,(09):1136-1138.
猜你喜欢
城镇供水(2022年4期)2022-08-20
科技视界(2022年9期)2022-04-09
智能计算机与应用(2021年6期)2021-12-17
综艺报(2020年21期)2020-11-30
航空维修与工程(2020年7期)2020-09-18
电脑爱好者(2019年17期)2019-10-30
试题与研究·教学论坛(2017年32期)2018-01-25
中学生数理化·高二版(2016年5期)2016-05-14
