
基于两级Hough变换的机载雷达建航方法
2011-06-22 12:46段芳芳
火控雷达技术 2011年3期
段芳芳 王 伟 韩 星 张 明
(西安电子工程研究所 西安 710100)
1 引言
强地杂波环境下快速、准确的航迹起始是机载雷达数据处理的一个难点,并且由于载机的非直线运动、处理过程中的近似误差、大气扰动等一系列因素[2],导致机载雷达测得的目标方位角在运动补偿后仍存在误差,使得正确航迹起始的难度进一步加大。目前常用的航迹起始方法[3,5,6]有基于逻辑的航迹起始方法、Hough变换法以及多假设航迹起始法。基于逻辑的航迹起始方法在大量地物杂波的密集多目标情况下,对判断规则要求苛刻,易引发较高的虚警率或漏警率;Hough变换法在密集杂波环境下,通常需要多次的扫描才能较好地航迹起始,因此不利于航迹的快速起始;多假设航迹起始法在理论上是最优的,但是其算法复杂,占用资源大,限制了它在工程中的使用。本文针对机载雷达目标特点,从工程实现背景出发,提出一种基于运动状态的两级Hough变换法。通过仿真和试验数据分析,证明该方法在保证航迹快速起始的前提下,可以有效降低虚假航迹起始概率。
2 原理简介
2.1 基于运动状态的Hough变换法[1,4]
在强地杂波环境下,目标的运动状态信息比位置信息更能反映目标航迹的特征,所以如果用目标状态信息对备选航迹进行检验,不但会极大地提高正确航迹起始概率,而且会减少虚假航迹起始概率。在Hough变换中,如果选取位移——时间作为参量,则匀速运动目标的问题转变为直线检测,其斜率反映目标的运动状态。假设候选航迹l的N次扫描中得到的量测为{(ri,θi),i=1,2,…,N},其中ri为第i次斜距量测值,θi为第i次方位角量测值,对其进行坐标转换得到两维笛卡儿坐标系中的量测值{(xi,yi),i=1,2,…,N}。
对相邻的两次量测做如下变换:

其中
式中Nθ为参数θ的分割段数。
对于来源于同一航迹的量测,在短时间内由于其运动状态相同,所以总能找到θn=θ0(n=1,2,…,Nθ),使得 Δρi[θn]=0,此时:
式中,i=1,2,…,N-1;Δxi=xi+1-xi是两次量测的x坐标之差,Δti=ti+1-ti是两次量测的时间差,ξi为量测高斯白噪声。由式(3)可以看出,对于来源于同一目标的量测,在短时间内应具有相同的运动状态,即目标的速度vxi、加速度axi不变。因此由公式(3)得到的θn应保持不变。图1中的实线为目标的运动状态vx+axΔti和θn(θ0)的关系,可以看出在θn∈[-50°,50°]时,线性度较好。为了使提取的目标运动状态有良好的线性和对应关系,可以根据目标运动状态的先验信息,对Hough进行修正,修正Hough为:

其中k=(vmax+amaxT)/12为比例系数,vmax和amax分别为目标的最大速度和最大加速度,T为采样周期。图1中虚线为利用修正Hough得出的目标运动状态和 θn(θ0)关系图,其中
2.2 基于运动状态的两级Hough变换法
在实际使用中,按照2.1节的方法对xi和yi分别做Hough变换,由于方位角误差的存在,xi和yi都受到方位角的影响。该影响导致,如果航迹起始波门选择过小则大多数航迹都不能起始,而过大则会产生很多虚假航迹。针对该问题,本文提出两级Hough变换的概念,即在基于运动状态的Hough变换后单独再做一级斜距的Hough变换,原理如下。
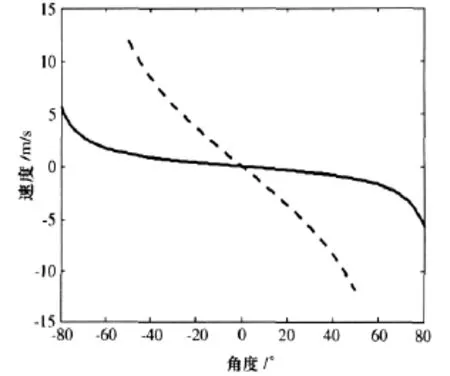
图1 运动状态和角度关系图
2.2.1 第一级Hough变换
先对xi和yi做基于运动状态的Hough变换。

选用稍大的波门δx和δy做粗筛选,去掉一部分航迹。即如果航迹满足和,则认为该航迹可能为可靠航迹,如果不满足,则该航迹为虚假航迹,直接从备选航迹中删除。
2.2.2 第二级Hough变换
由于在大于1km处,斜距ri与时间ti基本成线性关系,因此可以对斜距 ri做基于运动状态的Hough变换,用精细的波门δr做限制,得到最终的要起始的航迹。
3 实现步骤
基于运动状态的两级Hough变换法的实现步骤如下:
a.为第一个雷达扫描帧接收到的每一个量测建航,作为备选航迹;
b.对于每一个备选航迹,如果超过一个以上的量测位于相关波门内,则利用简化的全局最近邻法则,找到此备选航迹的点;如果没有量测位于确认区域内,则此备选航迹进行一步外推;
c.当备选航迹有三个量测时,利用基于运动状态的两级Hough变换进行起始判定;
d.如上过程持续到第n个雷达扫描帧(一般n选为5~7),如果备选航迹都能满足起始条件,且也满足n个雷达扫描帧中有m次观测,即符合m/n起始规则,则该航迹成功起始。
4 仿真试验
机载雷达监视区域为斜距2~20km,方位-45°~+45°。设虚警在整个监视区域内服从均匀分布,在目标跟踪门内虚警出现概率服从泊松分布,虚警概率密度为λ=4×10-4/m2。雷达扫描帧周期为1s。m/n逻辑法中 m=3,n=5,Hough变换中波门为 δx=δy=10°,δr=5°。模拟目标为 2 架飞机和 3辆车。2架飞机的飞行速度分别为v1=150m/s和v2=180m/s,起始位置分别为[r1,θ1]=[2500m,-5°]和[r2,θ2]=[3500m,1°]。3 辆车的行驶速度分别为 v3=50m/s,v4=80m/s,v5=70m/s,起始位置分别为[r3,θ3]=[10000m,0°],[r4,θ4]=[5000m,12°],[r5,θ5]=[3000m,5°]。
引入评价指标:
其中N为Monte-Carlo仿真试验次数,fi为在第i次仿真中起始的虚假航迹数;ni为在第i次仿真中起始的航迹总数。
其中lit代表第i次仿真试验中目标航迹t是否被正确起始。
表1为m/n逻辑法、基于运动状态的Hough变换法和本文提出的基于运动状态的两级Hough变换航迹起始方法的仿真结果比较。

表1 三种航迹起始方法仿真结果对比
从三种航迹起始方法的仿真结果可以看出,本文提出的方法在正确航迹起始概率和起始时间两项指标与m/n逻辑法和基于运动状态的Hough变换法相当,而虚假航迹起始概率明显降低。
5 试验结果
在某型号机载雷达航迹起始的试验中,进行6次试验,每次试验约300个雷达扫描帧的数据,试验中有两架飞机作为合作目标,飞机的下方是一条四车道的公路,路上车辆为非合作目标。试验结果见表2,其中作为合作目标的两架飞机的航迹起始概率均为100%。
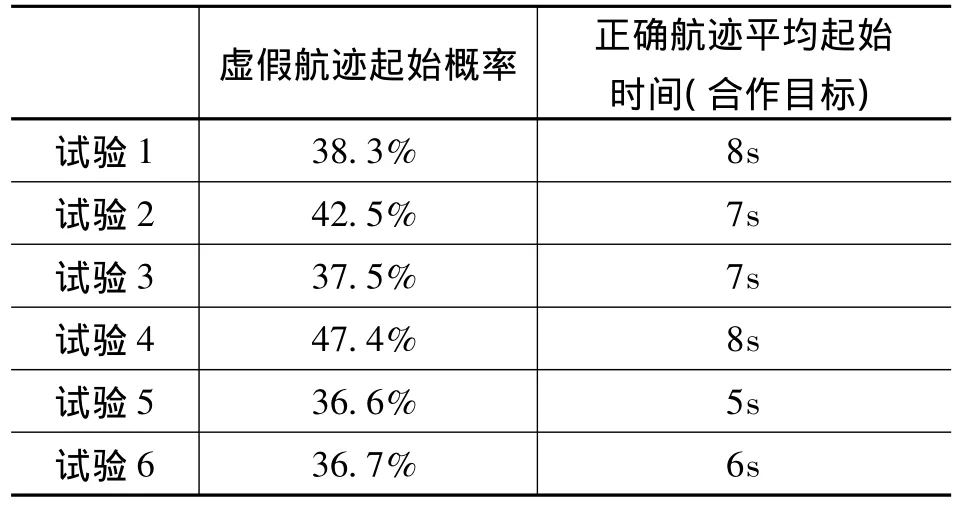
表2 试验结果
从试验结果可以看出,本文提出的方法在实际使用中虚假航迹起始概率较低,航迹起始时间满足系统要求,该方法有效可行。
6 结论
本文针对机载雷达下视目标的特点,提出了一种基于运动状态的两级Hough变换航迹起始方法。经过Monte-Carlo仿真分析和试验数据证明,该方法在保证航迹快速起始的前提下有效降低了虚假航迹起始概率。
[1]Hu Z.J.,Leung H.Statistical performance analysis of track initiation techniques[J].IEEE Trans.on AES(S0018-9251),1997,45(2):445-456.
[2]George Stimson.机载雷达导论[M].吴汉平等译.北京:电子工业出版社,2005.
[3]朱自谦.并行联合概率航迹起始逻辑[J].电子学报,2007,35(12):2421-2424.
[4]汤琦,黄建国,杨旭东.航迹起始算法及性能仿真[J].系统仿真学报,2007,19(11):149-152.
[5]朱洪艳,韩崇昭,韩红,左东广.航迹起始算法研究[J].航空学报,2004,25(3):284-288.
[6]王国宏,苏峰,毛士艺,何友.杂波环境下基于Hough变换和逻辑的快速航迹起始算法[J].系统仿真学报,2002,14(7):874-876.
猜你喜欢
科学与信息化(2021年30期)2021-12-24
雷达与对抗(2020年2期)2020-12-25
火控雷达技术(2020年2期)2020-10-16
青年歌声(2019年12期)2019-12-17
西部论丛(2018年8期)2018-09-03
北京航空航天大学学报(2017年7期)2017-11-24
雷达学报(2017年6期)2017-03-26
北京航空航天大学学报(2016年6期)2016-11-16
舰船科学技术(2015年8期)2015-02-27
现代电子技术(2014年13期)2014-07-09
