全路况林火巡护车辆巡护追踪系统设计
2011-06-21 06:12:46范东溟于建国
森林工程 2011年5期
范东溟,于建国
(东北林业大学交通学院,哈尔滨150040)
森林火灾是世界上破坏性和毁灭性最大、救助极为困难的自然灾害之一。根据我国林区实际情况,应当大力发展轻型、机动性和越野性能好的地面巡护车辆。
林火巡护车辆是一种质量小、操纵灵活的跨骑式骑乘的非道路机动车。该车辆具有底盘高、轮胎厚而宽大、灵活轻便、机动性好、通过性强等优点,可行驶于极其恶劣的交通环境,它在普通全路况车上安装消防设备,可以在林区巡护、及时发现火灾后的早期扑救等方面发挥更大的作用[1]。
原始森林中一旦发生火灾,巡护车辆却因在深山密林中没有参照物,无法判定火灾所处准确位置,从而影响讯息对外的传输,使灭火队员无法迅速到达火场组织扑救,延误灭火时间,造成损失。林火巡护车辆所处的特殊的作业环境要求该车辆的位置具有被追踪的功能。运用GPS全球卫星定位系统和无线通讯网络,使指挥中心随时掌握巡护车辆的巡视路线及所处方位,车辆及时传出讯息,使灭火队员其能够迅速到达火场,组织扑灭森林火灾,达到快速灭火、减少损失的目的[2-3]。为此,本论文对全路况林火巡护车辆用追踪系统进行设计。
1 全地形林火巡护扑救车简介
全地形林火巡护扑救车功率强大,是可以在各种地形 (如沙地、草地、森林、乡道等)驾驶的全路况车辆。该车最高速度可达50km/h,最小离地间隙240mm,其结构紧凑,质量较轻,操纵性能也很强;轴距1 240mm,最小转弯半径3 175mm,车重270kg;采用单缸油冷四冲程发动机,发动机输出功率14.5kW(6 500r/min),最大扭矩20N·m(5 000r/min),最大承载量可达210kg;驱动方式为二、四轮驱动转换。该车车轮均采用无内胎专用轮胎,抓地能力特强,贴地性极好,这种车辆能够基本上满足在林区快速机动行驶的要求[4]。
车辆配置的灭火装置主要有:前部的便携式风力灭火机、水龙带、干粉灭火器、灭火弹和后部的水灭火系统等。灭火装置结构合理、装拆方便、灭火效率高,是在保证不破坏原车结构和不改变原车行驶性能的前提下进行设计安装的,卸下灭火装置后可恢复原车的功能。该车配置的灭火装置如图1所示[5-6]。
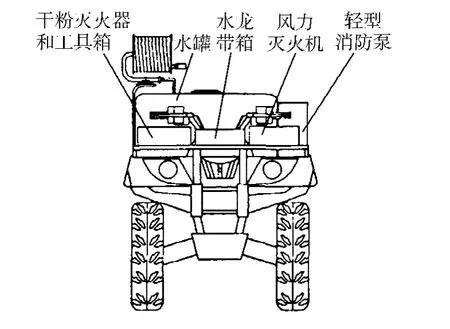
图1 林火巡护车辆及灭火装置结构示意图Fig.1 Schematic of fire extinguishing device of ATV
2 追踪系统原理
追踪系统的设计利用GPS卫星定位终端对远程目标——林火巡护车辆进行准确定位、实时追踪。可通过互联网随时查询目标位置,并实时跟踪目标移动方向和得到其行驶速度等信息。其追踪原理如图2所示。
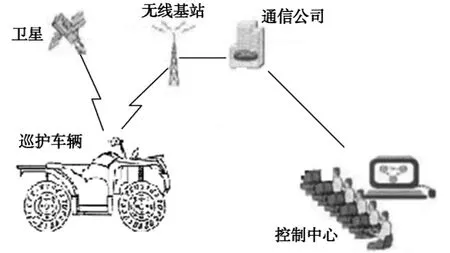
图2 林火巡护车辆追踪定位系统原理Fig.2 The tracing system theory of ATV
3 车载终端子系统CheckIn接口的设计
移动终端子系统通过访问服务器端提供的http方式的web API的方式来CheckIn当前的经纬度,高度、速度和方向 (以及可能的填写的wheriam和whatiamdoing)等信息。因为通过公众网络访问,移动终端的身份验证和数据安全性至关重要。
3.1 API访问End Point
EndPoint定义了终端子系统用来访问的链接地址。终端子系统需要记录该地址,将该地址作为CheckIn数据的API。在正式发布的时候,需要更改该地址为正式的线上服务器上CheckIn API地址,该地址不需要在终端子系统上人工输入,而是以配置文件的形式保存在终端子系统里。
3.2 数据包组成及结构
每次提交的数据包中应该有以下信息phone_number, checkinmode, latitude, longitude, altitude,speed,bearing,iwhat,iwhere,secret,key。
其中,secret和key两个参数用于验证终端子系统的身份。secret是一个随机产生的数字,利用这个随机产生的数字和分配给该终端的私钥来加密生成key。服务器端通过secret和私钥来重新计算key。如果服务器端计算出来的key与客户端计算得到的key相一致则通过验证,否则验证失败。
这些数据在组成数据包的时候根据url访问过程中GET方式提供参数的方式来提供数据包,其中的汉字字符的编码使用UTF8编码方式,对于数据中的特殊字符 (比如%,&符号等)使用标准的URL Encode方式。
3.3 终端子系统Secret的产生
终端子系统checkin的过程中,为了进行身份验证和安全性,需要终端子系统生成一个Secret随机数字串。为了保证在每次checkin时这个secret都是不重复的,这个secret的产生是根据当前的系统时间加上一个8位随机数来组成。
利用secret和终端子系统存储的私钥private_key,可以在终端子系统计算出一个公钥 (key)。公钥根据secret和private_key使用MD5算法计算得到:

3.4 服务器端验证方法
服务器端根据同样的方法计算出key,如果跟终端子系统发送过来的key一致,则验证通过,否则验证失败。
3.5 数据加密解密算法
需要加密的数据包括:经度、纬度。加密方法如下:
以纬度为例,表示定位数据的纬度值。数值范围0至162000000,表示0度到90度的范围,单位:1/500s,转换方法如下:
第一步:把GPS模块输出的经纬度值转化成以分为单位的小数;
第二步:把转化后的小数乘以30000
3.6 返回错误代码定义
CheckIN之后如果成功则返回0,否则返回错误代码。移动终端和服务器端会共享一份错误代码表。
车载终端子系统如图3所示,由林火巡护车辆蓄电池驱动。
4 服务器Web应用层的开发设计
Web应用采用主流的php编程语言开发,其中还大量使用了交互式网页应用技术ajax技术和jQuey技术。数据库则采用和php兼容性较好的Mysql服务器。设计开发的系统可部署在当今主流的服务器和应用平台上,具有很强的可移植性。
图3 车载终端子系统Fig.3 The terminal subsystem of ATV
4.1 地图技术
地图展示方面用目前最成熟的Google Map API 3来完成,Google地图目前是一个比较稳定的地图技术,开放的API使程序员更容易整合,不停的技术改革使Google地图更具人性化,大量的接口使地图的改进更容易、高效。同时,Google Map采用Ajax同步加载地图图片方法,缩短加载地图的时间。并且Google Map API 3还增加移动设备设计的功能,速度更快,更适用,使系统在后期扩展到终端子系统应用更方便。
该系统通过网页方式嵌入Google地图,经过Google地图提供API接口的整合,使地图中能呈现自定义的车辆图标、位置信息、行驶路线、实时跟踪、历史线路播放等功能,同时也包含Google地图自带的地图放大、水平垂直移动地图等功能。
4.2 设计方案
为了提高系统的响应速度,在视图部分中首先会把.php文件转换成.htm文件格式并且放入缓存文件夹中,用户在向某个.php发送请求时,服务器首先会查找系统中是否存在该.php文件对应的缓存的.htm文件,同时验证该文件是否需要改变,如果无需改变则直接从缓存文件中读取.htm文件数据。这样减少了程序对.php脚本解析的处理时间。
在数据库操作层面上,根据O/R模型映射原理,把数据库的结构存储转换成对象存储。通过一个类封装对数据库的操作方法,包括最基本的数据查找、更新和删除等。使数据库操作更方便,开发更简单。追踪系统界面与单车追踪轨迹分别如图4和图5所示。

图4 追踪系统界面Fig.4 The interface of tracing system
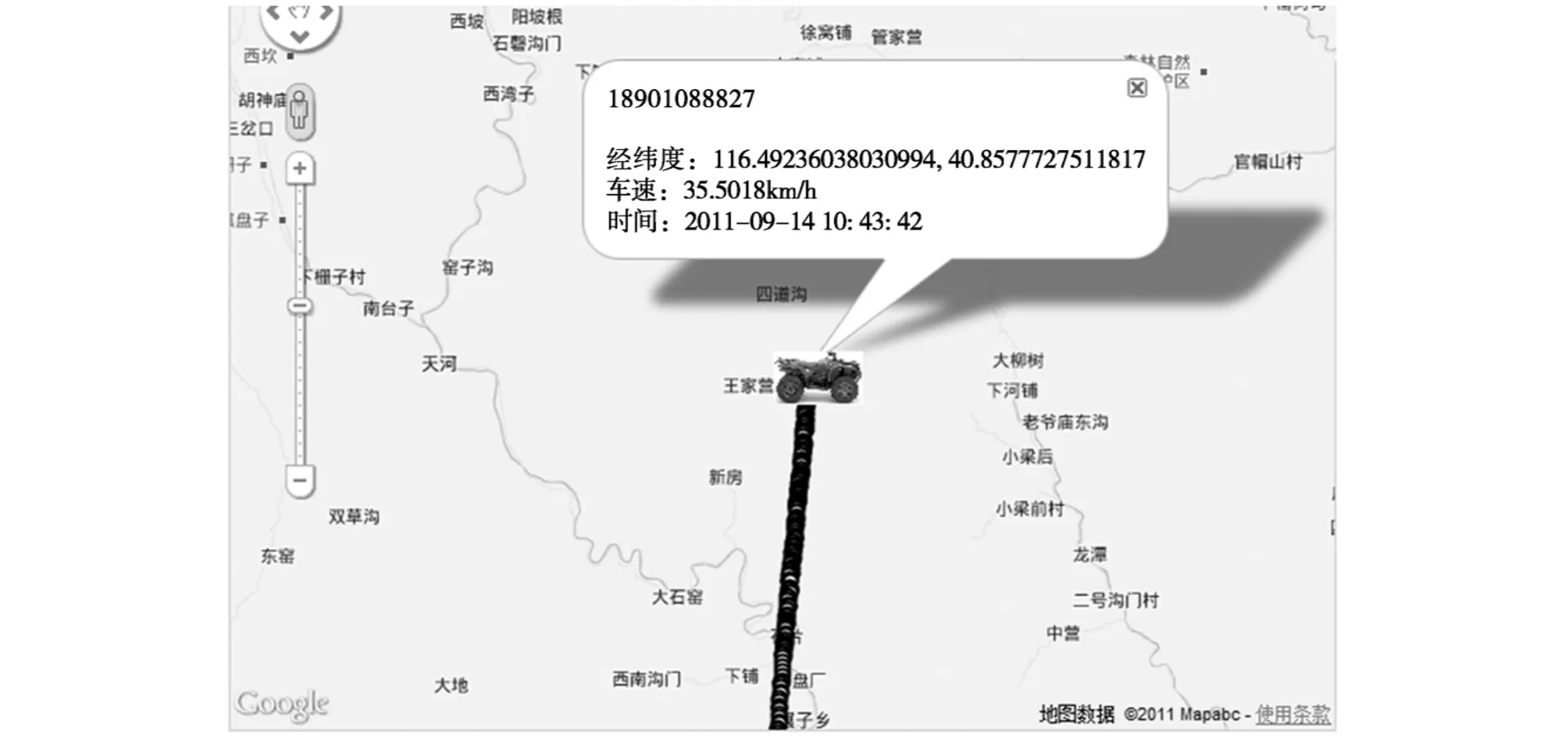
图5 单车追踪轨迹Fig.5 The tracing track of sole ATV
5 结论
把卫星定位系统与网络相结合,采用主流的php编程语言开发Web应用层,通过网页方式嵌入Google地图,经过Google地图提供API接口的整合,设计开发了用于林火巡护车辆的追踪定位系统,使地图中能呈现自定义的车辆图标、位置信息等,系统还具有追踪记录显示、单车记录回放等功能,并且增加了模拟数据生成器应用,通过发送模拟请求可以动态的看到车辆的行驶情况。
采用追踪系统的全地形林火巡护救车辆,通过指挥部终端的互联网监控,实现了对其巡护路线的实时追踪和控制,对于林火早期的发现,信息的即时传送,火灾的迅速扑灭,能够起到显著的作用,特别适合我国林区使用。
[1]阎春利,于建国.林火巡护车辆横向动力学特性分析[J].东北林业大学学报,2009(8):57-58.
[2]南春丽,顾樱华,李令举.汽车无线电导向行驶系统[J].汽车电气,2004(6):1-3.
[3]陈 劭.林火扑救优效组合技术研究[D].北京:北京林业大学,2007.
[4]于建国,宫俊凤.全地形林火地面巡护扑救车辆越障性研究[J].林业机械与木工设备,2008(5):13 -14.
[5]马永财,于建国.全地形林火地面巡护与扑救设备的研究[J].林业机械与木工设备,2008(9):21-22.
[6]郑加柱,赵 刚,陈 健.GPSRTK平面坐标转换过程分析[J].森林工程,2010,26(6):39 -42.
[7]阎春利,于建国.林火巡护与扑救车辆操纵稳定性研究[J].林业科技,2009,34(4):42 -44.
[8]巴兴强,于建国.林火巡护与扑救车辆悬架系统运动特性仿真[J].林业科技,2009,34(2):31 -34.
猜你喜欢
江苏安全生产(2022年11期)2023-01-11 06:29:40
舰船科学技术(2022年21期)2022-12-12 08:06:44
山西林业(2021年2期)2021-07-21 07:29:28
铁道通信信号(2020年3期)2020-09-21 09:13:00
中国新闻周刊(2020年6期)2020-03-08 14:20:46
铁道通信信号(2018年8期)2018-11-10 05:15:44
成功(2018年10期)2018-03-26 02:56:14
网络安全和信息化(2015年7期)2015-12-03 06:35:30
铁路通信信号工程技术(2014年1期)2014-02-28 16:55:27
电子设计工程(2012年23期)2012-07-13 06:30:00