基于激光测距技术的桥式起重机定位系统设计
2011-06-21 08:37:58冷建伟李涛
电气传动 2011年7期
冷建伟,李涛
(天津理工大学 自动化学院,天津市复杂系统控制理论及应用重点实验室,天津 300384)
当前桥式起重机定位控制方面研究缺乏从本质上解决定位精度差效率低,运行过程不平稳等问题。为了解决这些问题,我们提出采用激光测距器和条码定位仪作为测距测速传感器,将变频器和PLC相结合,实现精确的绝对认址及闭环控制。该系统已成功应用在天津太钢有限公司罩式退火炉(40+10)t天车上,并取得显著的应用效果。
1 桥式起重机定位工作方式
桥式起重机作为一种现代化的大型搬运机械,是物料装配系统中一种重要的设备,其以方便快捷、省时省工、载重量大等优点,在钢铁、港口等行业生产中应用广泛且作用显著。桥式起重机从结构上主要由桥架、大车小车行走机构、起升装置、司机室等部分组成。本定位系统主要是指对起升装置的吊钩进行水平面定位,而吊钩水平运动的载体是大小车行走机构,因此对吊钩的定位转化为对大小车行走机构的定位。桥式起重机定位工作原理为:在生产车间内将起重机作业区域分为以x,y,z 3个坐标为方向的三维运行空间,如图1所示。
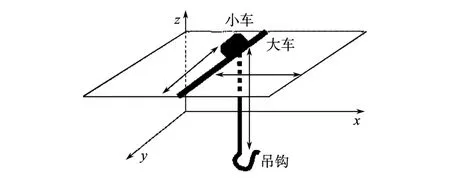
图1 定位系统示意图Fig.1 Schematic diag ram of positioning system
其中起重机的大车行走机构(下称大车)沿车间两侧上方墙壁铺设的钢轨作横向运行,设运行方向为x;小车行走机构(下称小车)在大车上运行,相对其作纵向运动,设运行方向为y;吊钩在垂直方向运动,设运行方向为z(本定位系统主要针对 x,y方向定位,故不对z方向定位进行阐述)。
为了精确快速地检测行走机构的实时运行位置,方便操作人员对起重机作业进行控制,由分别安装在起重机大车、小车上基于激光技术的测距传感器在x,y,z三维空间坐标上对起重机行走机构运行位置和吊钩高度进行精确测量,并将相应的信号传给上位机处理并显示吊钩的实时坐标以便操作人员监控。
2 桥式起重机定位系统设计
根据桥式起重机总体控制方案以及机械结构的控制要求,确定定位系统硬件结构的设计方案,系统电气控制的结构框图如图2所示。系统硬件电路由主控制器部分,传感器检测单元部分,变频器执行单元部分,以及外围扩展接口设备部分等组成。
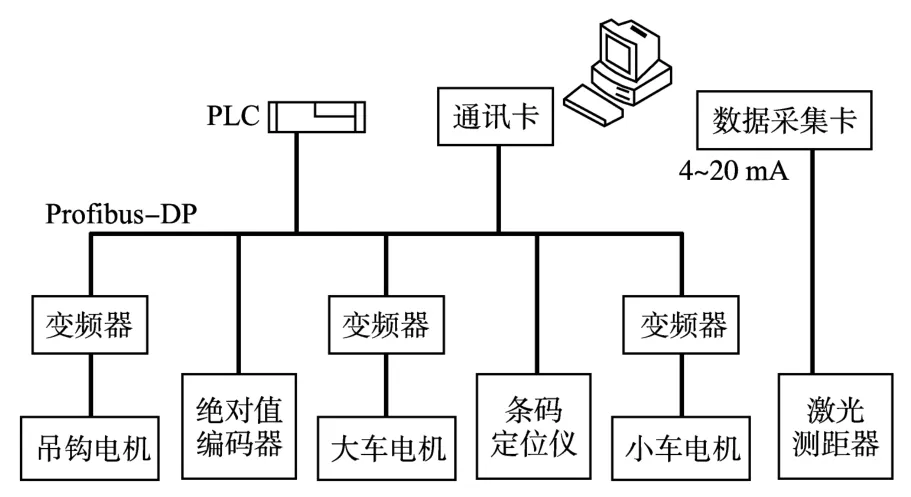
图2 桥式起重机定位系统结构图Fig.2 Structure diagram of overhead crane positioning system
2.1 定位系统
在本设计中为解决原有桥式起重机定位过程中所存在的定位不准确、效率低的问题使用基于激光技术的条码定位仪与激光测距器重新设计了定位系统的传感器检测单元。这种基于激光技术的测距方式,改变了原有的定位思路,是一种非接触测量方法,实现了在定位过程中的绝对认址。
激光测距器由电脉冲驱动产生激光束,激光束经过安装在大车一端的反射板反射,通过接收镜头返回接收元件,产生电脉冲再经过计算电脉冲的时间间隔(发射脉冲及接收脉冲),通过传感器的微处理器处理后,输出模拟量信号(4~20 mA或DC 0~10 V两种输出方式)。即得出相应的激光器距放射板的距离,也就是 x方向的坐标。在保证1 mm重复精度的情况下测距范围可从30 cm到300 m[1]。其工作原理如图3所示。
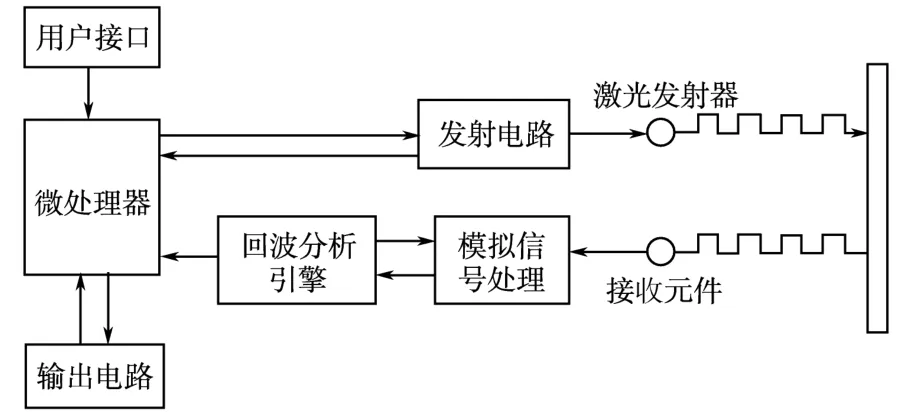
图3 激光测距器工作原理图Fig.3 Schematic diagram of laser ranging finder
条码定位仪是一种新型的条码阅读器,它集合了激光技术与旋转编码器的优点,通过读取行进路线上的条型码带确定准确位置,可有效地实现绝对认址甚至曲线定位。条码定位仪由两部分组成:激光条码读取头和条码带。工作原理是将条码读取头安装在大车上,条型码带全程安装在行走轨道中,当大车在轨道上行走时,安装在大车上的条码读取头实时地扫描3个条码,利用可见的红色激光从条码带可测定毫米级的位置值,附在条码带的信息就可以通过条码阅读器读出。最后通过内置的解码器把大车当前的位置信息输出至PLC[2]。
本定位系统所用的条码定位仪和激光测距器,都属激光测距方式,为非接触测量。应用该技术于本定位系统上具有如下优势:1)采用绝对认址方式,相对于目前广泛采用的编码器(属相对认址方式)可靠性和精确性更高;2)所得到的数字信号,精度高,且和上位机通信便捷,可以实时确定大车、小车的位置,易于实时监控;3)获得的位置信息模拟信号与起重机位置成线性关系,进行简单转换可得到起重机大车、小车当前运行的准确速度,便于调速和停准[1]。
2.2 控制系统
本定位系统控制部分设计方案在保留原桥式起重机控制系统结构和机械系统结构的基础上,采用以工控机(IPC)作为上位机,以可编程控制器(PLC)作为下位机的控制模式构成。采用双控制结构体系各部分功能如下。
2.2.1 下位PLC控制系统
由于PLC可靠性高、抗干扰能力强、循环周期短、指令集功能强大,并且采用模块化、无风扇结构,易于实现分布式的配置,因此适用于复杂环境和工况条件下的现场控制[3]。
下位机PLC主要作为I/O控制站负责对测距传感器的位置信号进行采集并利用各种数字量、模拟量模块完成实时数据采样、报警信号检测与输出,以及对变频器等执行机构进行控制。
2.2.2 上位工控机控制系统
工控机作为上位机能够进行复杂的算法运算和数据处理,具有良好的人机界面并能够保存大量数据,方便管理控制。所以选用工控机作为核心,对PLC以及现场检测执行设备监控管理并对过程数据进行处理。这样可以极大地提高控制系统的可靠性和灵活性,增加系统的监控和管理水平,便于用户的程序开发和应用。
工控机查询并读取PLC内部数据通道的数据信息,进行数据分析和处理,在人机界面实时显示起重机当前运行状态以及位置、高度信息等实时数据,并用数据库加以管理和记录。操作人员通过上位机监控界面向现场执行设备发出控制指令,控制行走机构准确运行到指定位置。在运行过程中工控机通过预先设定的控制策略并根据测距传感器反馈回来的信号处理后实时调整变频器的频率值,使机车先以较高的速度运行到接近目的地址的位置,然后平稳地减速到较低的速度运行,在到达目的地址时制动停准,实现起重机运行位置与速度的闭环控制。较好地满足了桥式起重机作业中高速运行、换速平稳、低速停准的速度控制和准确定位要求。克服天车变速时的速度曲线拐点所带来的运行不平稳等问题,使之更为圆滑,将天车的起步、停车以及变速能够更加平稳。
2.3 数据通信
在本定位系统中,工控机、PLC、输入输出模块、传感器、变频器、光电开关等电气设备之间数据传输采用基于PROFIBUS-DP的现场总线技术。PROFIBUS-DP现场总线技术不依赖设备制造厂家,利用其开放性可以方便快捷地进行自动化系统中控制设备与传动装置以及分布式I/O的通信,各种自动化设备均可通过同样的接口交换信息,可以取代4~20 mA模拟量信号传输。PROFIBUS-DP现场总线通信速率为19.2 kb/s~12 Mb/s,通讯数据包为244字节,因此其传输速度快、数据量大以及可扩展性等优点极大地满足了现场需要[4- 5]。
在本定位系统的数据传输中,一方面上位机的控制命令和调度命令必须准确无误地下发到下位机,下位机的数据采集终端必须要将采集到的各种在线数据准确、迅速地送到PLC和工控机,例如条码定位仪扫描条码测定位置值,通过内置的解码器把大车当前的位置信息由PROFIBUSDP总线输出至PLC。另一方面,由于起重机出厂时其各项运行参数均保存在下位机PLC中,为了进行上位计算机和下位控制器通讯,采用PROFIBUS-DP现场总线实现数据交换,以备系统数据分析、处理与显示。完成这两个方面功能的关键在于数据通讯,本设计采用PROFIBUS现场总线技术实现了多个设备之间的数据共享和协调控制。如图4所示。
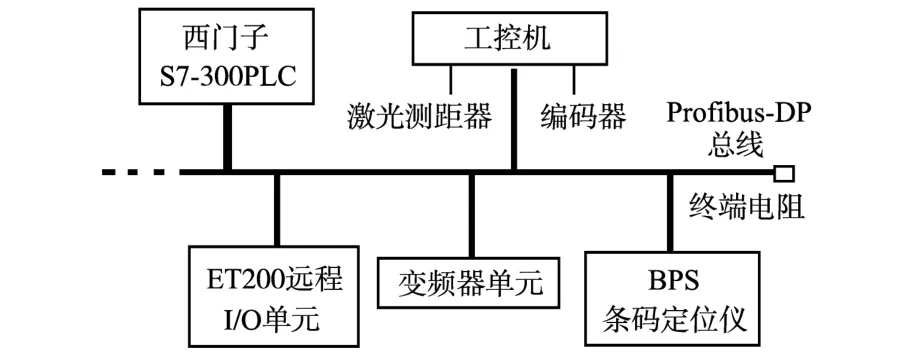
图4 PROFIBUS-DP总线连接图Fig.4 Connection diagram of PROFIBUS-DP bus
3 结论
文中对桥式起重机定位控制系统进行研究,采用基于激光测距技术的测距传感器,与变频器和PLC相结合实现精确的绝对认址及闭环控制。运行表明,本定位系统明显提高对生产工具和原料的定位精度,从传统的±20 cm提高到±3 cm以内,同时达到桥式起重机更为高效平稳运行的目的。完成同样的工作量只需原有时间的三分之一,这样显著提高了运行效率。
[1]王勇军,周奇才.自动化仓库堆垛机高速运行控制技术[J].起重运输机械,2003(1):27-29.
[2]李小平.基于BPS的堆垛机速度控制与认址方法研究[J].起重运输机械,2008(12):13-15.
[3]廖常初.S7-300/400 PLC应用技术[M].北京:机械工业出版社,2007.
[4]刘锴.深入浅出西门子S7-300PLC[M].北京:北京航空航天大学出版社,2004.
[5]崔坚,李佳.西门子工业网络通信指南[M].北京:机械工业出版社,2006.
猜你喜欢
农业装备与车辆工程(2021年8期)2021-08-28 09:49:16
南方农机(2021年1期)2021-01-20 11:41:46
港口装卸(2020年3期)2020-06-30 10:37:54
测控技术(2018年6期)2018-11-25 09:50:24
通信电源技术(2018年5期)2018-08-23 01:16:04
制导与引信(2017年3期)2017-11-02 05:17:00
电子世界(2017年15期)2017-08-30 00:17:22
消费导刊(2017年21期)2017-01-28 11:05:29
福建质量管理(2016年9期)2016-12-09 02:41:01
中国机械(2014年15期)2014-04-29 03:44:58