点对点的模糊控制在机器鱼路径优化上的研究
2011-06-21 08:37:58肖权孔峰陶金
电气传动 2011年7期
肖权,孔峰,陶金
(广西工学院 电子信息与控制工程系,广西 柳州 545006)
1 引言
鱼类是自然界出现较早的动物之一,经过鱼类自身漫长的进化和长期优胜劣汰的自然选择,鱼类已经逐步成为海洋的“主人”。鱼类生活的环境也造就了鱼类很出色的水下运动能力。鱼类高效的运动能力、良好的机动性等优点是人类水下仿生设备模拟的目标。在国内,机器鱼的研究成为水下仿生设备研究的热点之一。
当前,机器鱼主要的研究是让机器鱼在环境因素不确定的非线性、动态变化环境中按照人为意愿能有效地完成事先给定的任务。这一任务实现前提是机器鱼能精确地运动到指定位置实现点对点的控制,点对点控制效果决定了机器鱼的控制效果。机器鱼点对点(PTP)控制算法是喻俊志、陈尔奎等人提出来的,该算法的策略是消除机器鱼在起始方向,位置与目标点之间的方向误差和距离误差[1]。由于机器鱼所处环境因素的不确定性,无法用数学模型描述机器鱼的运动过程。同时,在机器鱼游动过程中,水的干扰对机器鱼点对点控制有较大的影响,导致机器鱼点对点控制效果不理想。
针对点对点的控制在机器鱼游过的路径受到水干扰波动较大的不足之处,本文引入点对点(PTP)的模糊控制算法,不需要建立数学模型,根据实验数据设计模糊控制器。实验结果表明,点到点(PTP)的模糊控制算法能优化机器鱼的游动路径,提高点对点的控制效果。
2 机器鱼简介
本文选用北京大学自主研发的三关节仿鲹科机器鱼为研究对象。该机器鱼的鱼体长为40 cm,体重约0.8 kg。机器鱼动力系统是其尾部提供的,其尾部由铝制骨架架构的3个直流伺服电动机与橡皮套封装的尾鳍构成的,鱼尾为新月型尾鳍,该类型机器鱼具有体积小、质量小、关节灵活性、稳定性与同构性等优点。机器鱼的通信模块与控制单元位于机器鱼的头,主要负责机器鱼与计算机控制平台之间信息相互交换。机器鱼有15个速度档、15个方向档,速度档值越大,机器鱼的运动速度越快。机器鱼方向档分为两个部分,0~6档表示机器鱼向左转,7档表示机器鱼直游,8~14档表示机器鱼向右转。在机器鱼的控制平台作用下,机器鱼可以在二维空间的水池中模拟鱼体波曲线方程[2-3]。在实验控制平台的作用下,机器鱼借助CCD摄像头获取水池中的信息。
3 模糊控制器的设计
3.1 模糊控制器变量的确定
模糊集合理论是模糊控制的基础,模糊推理系统由4个重要部件组成:知识库、推理机制、模糊器与反模糊器[4]。本文采用二维模糊控制器,将t时刻,机器鱼鱼头与目标点的夹角θi作为输入偏差E;在t+1时刻,机器鱼鱼头与目标点的夹角θi+1与t时刻的机器鱼鱼头与目标点的夹角θi之差αi作为偏差变化率EC,将实际机器鱼的鱼头坐标与目标点的夹角γ作为输出量,通过摄像头可以得到目标点的坐标、机器的方向及其鱼头坐标等环境信息。机器鱼的模糊控制器结构图见图1。
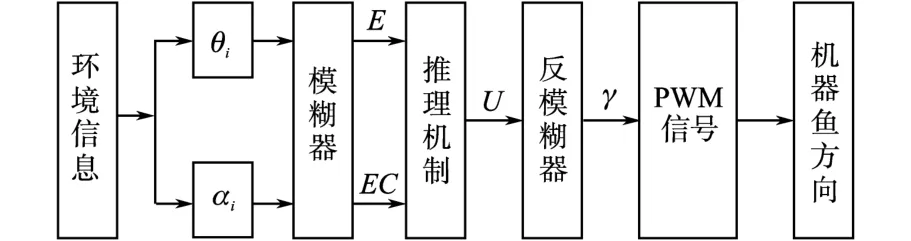
图1 机器鱼的模糊控制器结构图Fig.1 The structure of biomimetic robot-fish fuzzy controller
3.2 论域与隶属函数的确定
根据模糊控制器中设置的变量,在机器鱼全局视觉坐标系中,以目标点为参考对象,规定机器鱼鱼头向左偏为负方向,向右偏为正方向[5];实际角度 E的范围定义为[-90°,90°],偏差变化率EC的范围为[-45°,45°],控制量U 的范围为[-90°,90°]。偏差 E、偏差变化率EC 与控制量U均选择13级,论域为[-6,6],语言变量均分为7档,负大(NB),负中(NM),负小(NS),几乎为零(Z),正小(PS),正中 (PM),正大(PB)[6]。用[1,2,3,4,5,6,7]表示偏差E、偏差变化率EC与控制量U的模糊控制语言变量档:“1”代表PB,“2”表示 PM,“3”表示 PS,“4”表示 Z,“5”表示 NS,“6”表示 NM,“7”表示 NB 。偏差 E 、偏差变化率EC与控制量U的隶属度函数都选择用三角形函数。输入偏差E的隶属度函数见图2。

图2 输入偏差E的隶属度函数Fig.2 T he membership function of input deviation E
3.3 模糊控制规则库与控制量表查询
根据输入误差E的隶属函数与误差变化率EC的隶属函数的参数,用Max-Min推理法进行推理在Matlab中得到的控制量查询表与模糊控制规则库如表1、表2、表3、表4所示。
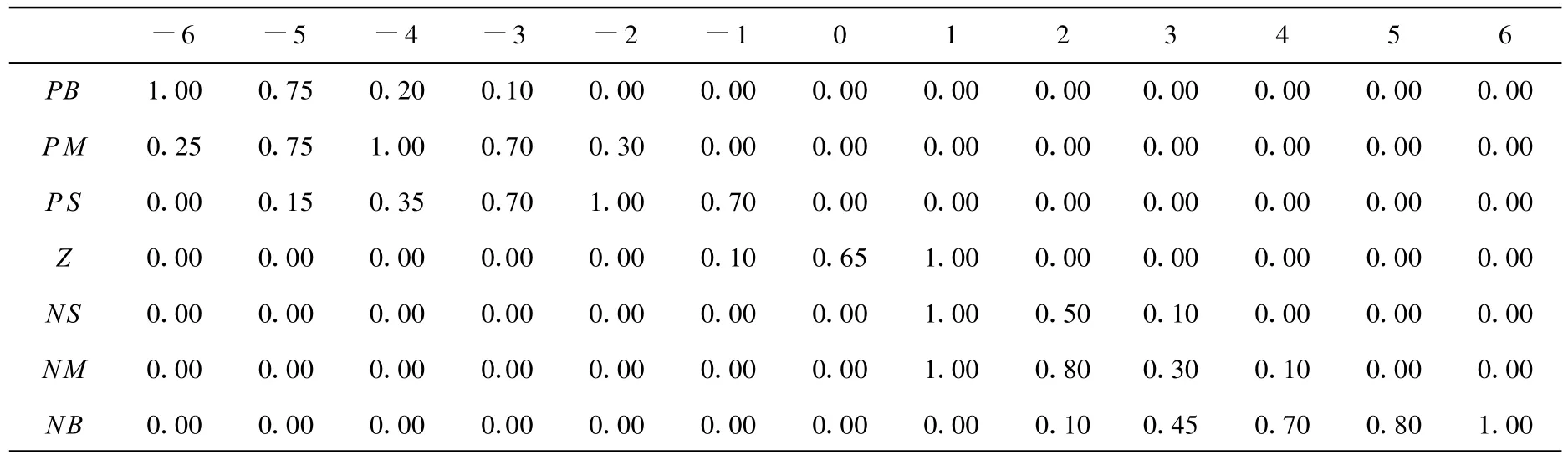
表1 输入偏差E的隶属函数赋值表Tab.1 The membership function assignment of input deviation E
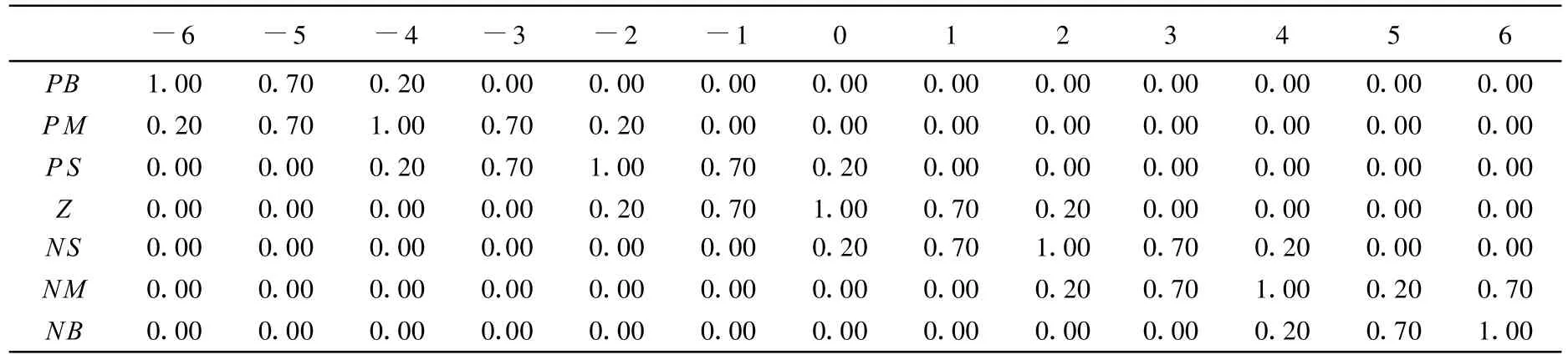
表2 偏差变化率EC的隶属函数赋值表Tab.2 T he membership function assignment of deviation change rate EC
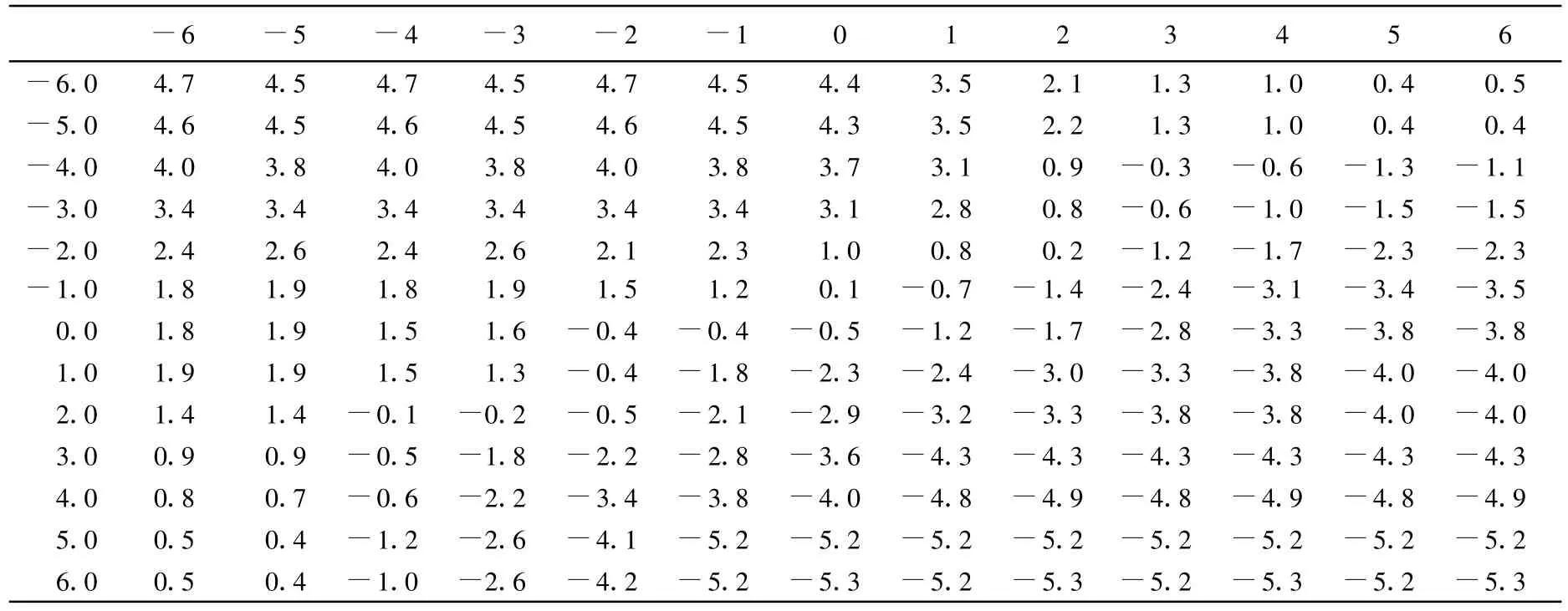
表3 控制量查询表Tab.3 The control inquires
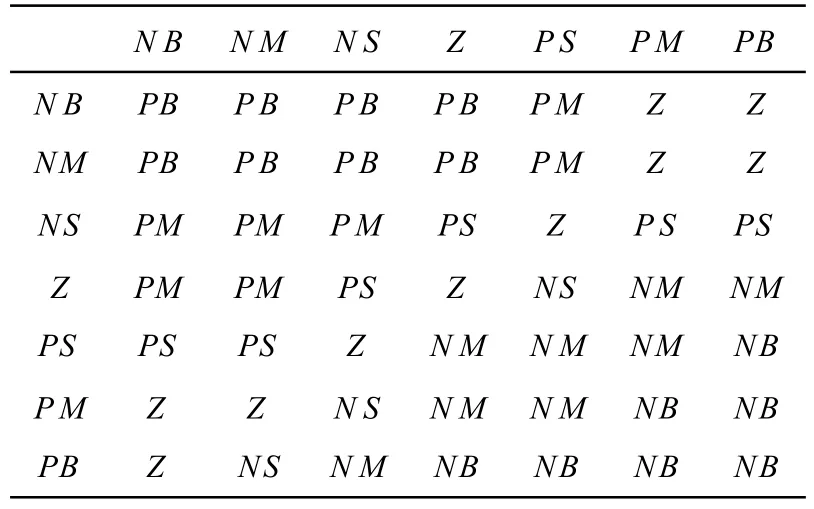
表4 模糊控制规则库Tab.4 T he fuzzy control rules
4 程序步骤
在机器鱼的控制平台中定义的二维坐标原点位于水池左上角(如图3所示),通过全局视觉得到水池中的机器鱼与目标点的动态信息。在实验过程中,以目标点为参考对象,规定机器鱼向左偏为负方向,向右偏为正方向,机器鱼在游动的速度值选为“12”档,机器鱼到目标点后停止。机器鱼鱼头与目标点的程序过程分2种情况。
4.1 鱼头与目标点夹角为[-90°,90°]时
Step1:若机器鱼在目标点的左侧(如图3所示),通过全局视觉得到在t时刻水池中机器鱼鱼头坐标F(xFA,yFA)与目标点的坐标G(xG A,yG A),目标点与x轴的夹角为βi,机器鱼鱼头与目标点的夹角为θi,根据三角函数关系得到:

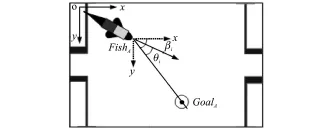
图3 t时刻水池中的信息Fig.3 The information of time t in the pool
在t+1时刻,在机器鱼的游动过程中,水波干扰使得机器鱼鱼头坐标与目标点坐标发生变化(如图4所示),此时机器鱼的鱼头坐标为F(xFB,yFB)与目标点的坐标为G(xGB,yGB),目标点与x轴的夹角为βi+1,机器鱼鱼头与目标点的夹角为θi+1,根据三角函数关系得到:

若机器鱼在目标点的右侧,按式(1)、式(2)求解θi与θi+1过程与机器鱼在目标点左侧相似。
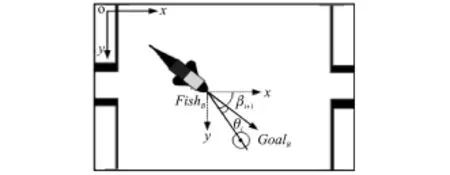
图4 t+1时刻水池中的信息Fig.4 The info rmation of time t+1 in the pool
Step2:根据Step1可求得的输入的偏差变量θi与偏差变化率αi=θi+1-θi。
Step3:将Step2的数据分别进行处理,在Matlab中生成模糊控制规则库与模糊控制查询表,将实际机器鱼鱼头坐标与目标点的夹角γ作为机器鱼的方向。
Step4:将Matlab生成的规则库用C语言进行描述,并在机器鱼的控制平台进行程序调试与实验验证。
4.2 鱼头与目标点夹角小于-90°或大于90°时
机器鱼在所处的位置以舒适圆[6]为转弯半径;当机器鱼鱼头与目标点的夹角小于-90°时,机器鱼以舒适圆为转弯半径向右转,反之,以舒适圆为转弯半径向左转;当在全局坐标系中得到机器鱼鱼头与目标点的夹角为[-90°,90°]时,再按前文机器鱼鱼头与目标点的夹角为[-90°,90°]的步骤Step1、Step2、Step3、Step4 进行程序设计。
5 实验结果
5.1 实验条件
在机器鱼控制平台对点对点的模糊控制算法进行验证,实验的水池为2 m×3 m,在验证实验中,用2组实验进行对比:第一组用点对点控制算法记为A组;第2组用点对点的模糊控制算法记为B组。为了让2组实验有较强的可比性,在验证实验过程中,采用的点到点模糊算法是两个定点之间的模糊算法,用球门柱固定的红色球为实验过程中的终点,起点位置为机器鱼鱼头所在点(如图5所示),在两组实验过程中的初始条件:机器鱼的起点与终点位置相同;机器鱼鱼头坐标与目标点之间的夹角赋初值为γ=0;为了尽可能的减小水环境对机器鱼的干扰,选取机器鱼游动的速度为“12”档;B组算法与A组算法唯一的不同之处是B组算法运用了模糊控制算法。
5.2 实验输出图像及分析
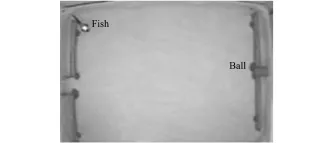
图5 机器鱼与球的位置Fig.5 T he position of biomimetic robot-fish and goal
在实验过程中截取A,B组中机器鱼游动过程的实时图像分别为A1,A2,A3,A4、B1,B2,B3,B4(如图6所示),根据A,B两组实验中机器鱼游过的路径曲线,在A4与B4中分别对A,B组机器鱼游过的路径曲线进行描述;图6A4,图6B4中虚直线为机器鱼起点到终点间的连线,曲线是机器鱼游过的路径,机器鱼从起点游到终点的最优路径曲线是起点到终点的虚直线,但在机器鱼游动过程中,水的干扰使机器鱼鱼头游动的方向偏执(即γ≠0),从而使机器鱼点到点的控制效果不好。
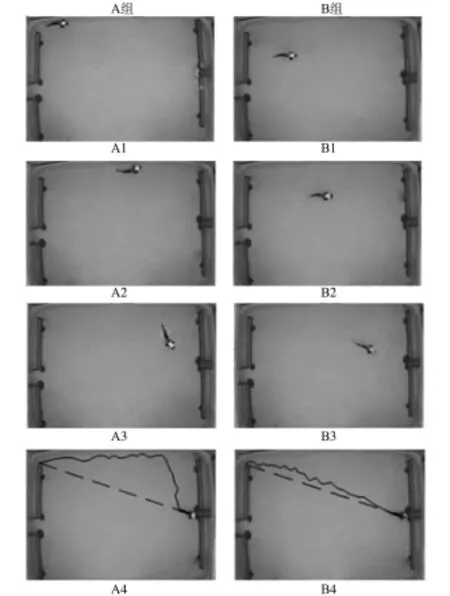
图6 实验过程图像Fig.6 The experiment process images
从A,B组中各截取的4张实时图片可知,与起点到终点间的最优路径曲线相比较,在A组中,图像A1至图像A4所示机器鱼游过的路径曲线与起点到终点间的最优路径曲线相比较波动的幅值较大;在B组中,与起点到终点间的最优路径曲线相比较,图像B1至图像B4所示机器鱼游过的路径曲线与起点到终点间的最优路径曲线波动的幅值较小(相对于组的波动幅值)。由此可见,点到点的模糊控制可以优化机器鱼游过的路径,提高机器鱼点到点的控制效果。
6 结论
通过点对点的模糊控制算法相结合设计模糊控制器,实现了机器鱼的点对点的模糊控制。与机器鱼点对点控制算法相比较,采用点对点的模糊控制算法在优化机器鱼游过的路径上具有有效性与可行性,提高机器鱼点对点的控制效果;给机器鱼的协作、避障控制研究奠定了基础。
[1]喻俊志,陈尔奎,王硕,等.仿生机器鱼基本运动控制算法的研究[C]∥北京:中国自动化学会,2002:152-157.
[2]Lighthill M J.Note on the Swimming of Slender Fish[J].Fluid Mech.,1960,9:305-317.
[3]Barrett D,Grosenasugh M,T riantafyllou M.The Optimal Control of a Flexible Hull Robotic Undersea Vehicle Propelled by an Ocillating Foil[J].P roc.1996 IEEE A UV Sy mp.New York:IEEE Press.,1996:1-9.
[4]张国良,曾静,柯熙政,等.模糊控制及其 MA TLAB应用[M].西安:西安交通大学出版社,2002.
[5]谢超平,孔峰,陶金.基于模糊控制的仿生机器鱼转向控制研究[J].机器人技术与应用,2009(4):26-27.
[6]陈尔奎,喻俊志,王硕,等.仿生机器鱼运动方向的模糊控制研究[J].高技术通讯,2004,14(2):63-67.
[7]Zhang Dandan,Fang Yimin,Xie Guangming,et al.A Coordination Method for Multiple Biomimetic Robotic Fish Boxpushing[C]∥Proceedings of the IEEE International Conference on Mechatronics&Automation Niagara Falls,Canada July,2005:941-945.
[8]北京大学.机器人水球比赛项目推介书[M].北京:北京大学,2009.
猜你喜欢
趣味(数学)(2022年5期)2022-07-29 03:24:16
今日农业(2021年6期)2021-06-09 08:05:06
中学生数理化·七年级数学人教版(2020年12期)2021-01-18 06:57:42
语数外学习·高中版上旬(2020年8期)2020-09-10 07:22:44
电子制作(2018年19期)2018-11-14 02:37:08
西南石油大学学报(自然科学版)(2018年4期)2018-08-02 05:42:38
小学生作文(中高年级适用)(2017年9期)2017-10-13 08:20:52
广西电力(2016年5期)2016-07-10 09:16:44
中国学术期刊文摘(2016年2期)2016-02-13 16:01:41
爆笑show(2015年5期)2015-07-09 17:45:02