
SS8、SS9机车电机电流不平衡故障分析
2011-06-19 06:30吴传鸽上海铁路局上海机务段
上海铁道增刊 2011年1期
吴传鸽 上海铁路局上海机务段
SS8、SS9机车作为当前铁路主要干线特快、快速客运列车牵引的主力机型,目前上海机务段共支配SS8机车41台,SS9机车29台。2010年共预报运行中电机电流不平衡116台次,涉及机车32台。机车运行中发生电机电流不平衡,将直接降低机车牵引力,甚至造成跳主断而失去牵引力。作为机车运用中的惯性故障,对运行中电机电流不平衡故障原因的准确判断和及时处理就显得尤为重要。
1 问题调查
通过对2010年发生的116件电机电流不平衡故障原因进行统计、分析,发现故障原因主要集中在传感器故障、微机控制柜故障、整流装置故障、轮径设置问题及其他,具体见表1。
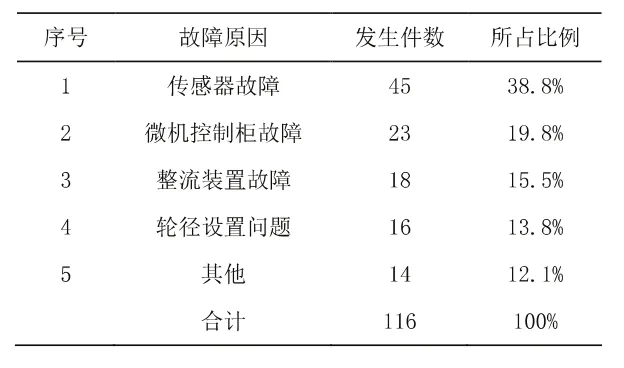
表1 电流不平衡故障统计表
2 控制原理分析
2.1 微机控制原理
SS9机车微机控制诊断系统采用TPW8A型微机控制柜和TFT彩色液晶显示诊断装置构成,能够实现机车牵引/制动、列车供电、自动过分相等控制功能,同时提供防空转(滑行)保护,故障监控、记录,故障处理提示功能,并且具有完善的高低压自检功能。控制原理见图1。
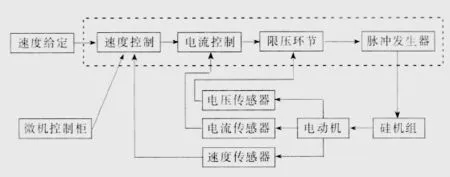
图1 微机控制原理图
SS9机车机车特性的控制方法采用速度与电流的双闭环控制,电压的限制环节作为辅助控制。图1中,虚线框内部分为电子控制部分,由微机柜来完成。首先司控器给出指定速度与通过速度传感器检测出的机车实际速度比较,得出当前所需的电机电流值。该值送入电流控制部分作为控制指定值,与机车的实际电机电流值相比较得出整流桥的整流输出电压控制值。脉冲的形成与放大环节由脉冲发生器负责执行,进而控制整个机车的主回路工作状态。限制环节只在电机电压达到限制值时,对整流输出电压进行抑制。机车在微机控制下,通过速度、电流、电压三个参数的不断调节来控制机车速度。
2.2 特性控制原理
SS9机车采用恒流准恒速特性控制:即低速时的恒流控制和设定速度点的准恒速控制。司控器的每一个给定点对应着一条特性曲线。
SS9机车特性控制函数公式如下:

式中Im--牵引电机给定电流,A;
n--牵引级位,0~18级连续可调;
v--机车速度,km/h。
在粘着限制的范围内,机车首先按照恒流起动(110 n),待机车速度升高进入特性的准恒速控制区,即(880 n-88 v)后,机车按准恒速运行,同一级位速度变化范围为10 km/h,在高级时受最大起动电流1 305 A限制。整流装置采用顺控方式,先开放大桥,再依次开放两段小桥。当电机电压达到限制值后,自动进行无级磁场削弱。SS9机车控制最深磁场削弱系数为0.49。同时控制系统对运行中的轴重转移进行电气补偿,前后两个转向架中前架减载5%,后架增载5%,额定电流以下不进行补偿。
3 电流不平衡原因分析
通过以上微机控制原理及特性控制原理分析,结合检修运用中实际案例,可以看出影响电机电流并直接造成电流不平衡的原因主要有:传感器故障、微机控制柜故障、整流装置故障、轮径设置不当、小齿轮弛缓、机车空转、轴重转移、电机制造时的固有差异等。
3.1 传感器故障
3.1.1 电流、电压传感器故障
电流、电压传感器使用中发生飘移,或静差过大,直接反馈到控制系统,导致电流、电压输出值不准确,造成电流不平衡。电流、电压传感器故障在库内检查即可发现,在机车静止时提手柄至2-3级,进入显示诊断装置"格式二"菜单,检查各电机的电流、电压,根据经验值如果达到50 A或50 V左右时,应更换传感器。3.1.2速度传感器故障
速度传感器飘移将造成测速误差,导致速度修正后的两架速度有偏差,甚至引起防空转误动作,造成电流不平衡。速度传感器故障可通过微机实时监控故障显示、两架速度不一致、途中空转预报等简单判断,回段后对传感器进行检查、试验,确认后进行更换。
3.2 微机控制柜故障
微机控制柜故障主要为插件板松脱、不良等。微机控制柜通过司机的速度给定对全车进行控制,一旦控制系统发生故障必然会出现电流不平衡。对于微机控制柜故障,可进行转架试验,或根据相关作业指导书观察插件板指示灯状态和通过测试孔测量可疑信号等进行判断。
3.3 整流装置故障
整流装置故障主要为整流装置某桥臂不良或单个晶闸管故障。整流装置故障,一般在速度不高时电流偏差不会很明显,因为装置本身可以增加移相控制量来达到所需要的电流。达到高速时,由于可用的桥已全开放、整流电压再不能升高时,造成电流不平衡。
3.3.1 两架电流不平衡
机车在110 km/h左右运行时,机车的整流电压一般达到1 100 V的电压限制值,才能维持机车在较大电流下工作。如果某架某桥臂故障,会造成整流电压达不到这一数值,该架便提前开始磁场削弱,以维持牵引控制的目标牵引电流,这时会表现为两架牵引电机电枢电流一致而励磁电流不一致;当机车进一步提高速度运行时,发生桥臂故障的转向架在磁场削弱达到0.49以后,便会发生两架牵引电流不平衡。此类故障可根据以上励磁电流不一致或高速时发生两架不平衡等现象进行判断,对相应桥臂进行检查。
3.3.2 电机间电流不平衡
机车在110 km/h以上,整流装置利用磁场削弱晶闸管的开通,提高电机电流。如果某电机磁场削弱晶闸管发生故障,将使得同一架发生电机间电流不平衡,由于持续发生一般还将伴随小齿轮弛缓的误报,并跳主断。此类故障可根据预报,检查、测量相应晶闸管的内阻或上试验台进行判断、处理。
3.4 轮径设置不当
两架间轮径设置不一致,也会引起两架电流不平衡。在微机控制系统中,两个转向架的机车速度根据轮对转速取样值和本架轮径设置进行计算,即v=nπD。两个转向架计算的机车速度不一致,当机车从恒流起步加速时,两架进入准恒速控制的时间不同步,轮径设置偏大的一架速度偏高,而电流偏小;因此引起机车在恒速运行阶段两架电流不平衡。轮径设置不当一般发生在机车轮径变化(落轮、不落轮镟削)进行设置后,或更换微机信息显示插件板后,可通过运行中两架速度不一致、微机与监控系统速度偏差、查看显示诊断装置"二级显示"中轮径数值进行判断,并相应修正轮径数值。微机与监控轮径设置偏差较大时,将影响监控装置位置自动修正,因此机车轮径变化后,应立即修正微机轮径设置,同时对监控装置轮径进行重新设置。
3.5 小齿轮弛缓
牵引电机发生小齿轮弛缓将直接导致电机转速升高而电流减小,造成电机电流不平衡。微机控制系统具有小齿轮弛缓保护功能,当同架两个电机电流大于200 A,而两个电机的电流差值比电流大者超过30%,并延续5 s以上时,小齿轮弛缓保护动作跳主断。
3.6 其他
3.6.1 空转
机车运行中发生空转时,电机转速升高,电流上升,造成电流不平衡。由于空转造成的电流不平衡,会随着防空转投入后的自动撒砂来抑制空转,降低电流。因此电流不平衡仅发生在空转时,空转恢复后电流也会恢复正常。
3.6.2 轴重转移
机车运行中发生轴重转移时,当电机电流大于额定电流,轴重转移补偿发生作用,使得前架减载5%,后架增载5%,造成两架电流不平衡。
3.6.3 电机本身特性
另外牵引电机生产制造时的固有特性差异造成的电流不平衡,由于属电机本身差异,本文不作分析。
4 结束语
从以上分析可以看出,发生电流不平衡的原因中,轮径设置不当、空转、轴重转移和电机制造特性不属于故障引起的电流不平衡,且所占比例较小。其他发生较多的均为配件质量造成,因此针对不同的故障现象准确判断故障原因,才能在第一时间处理到位,避免重复发生。
猜你喜欢
中国设备工程(2023年2期)2023-02-13
科学与生活(2021年19期)2021-10-30
装备制造技术(2021年2期)2021-07-21
机械(2021年1期)2021-03-09
Computers Materials&Continua(2019年7期)2019-07-18
铁道通信信号(2019年2期)2019-03-26
减速顶与调速技术(2018年2期)2018-11-09
铁道学报(2018年5期)2018-06-21
中国铸造装备与技术(2017年3期)2017-06-21
现代工业经济和信息化(2016年19期)2016-05-17
