
一种用于桥梁识别的水域分割提取方法
2011-06-05 09:14:44于素芬
电光与控制 2011年8期
于素芬
(光电控制技术重点实验室,河南 洛阳 471009)
0 引言
桥梁是重要的人工建筑,是交通要道,对桥梁识别的研究,在军事上和民用上都有重要意义[1]。目前常用的桥梁识别的方法可归纳为两类:一种是基于知识驱动型的,即先根据水上桥梁的特点提出先验假设[2],而后根据假设有目的地分割、标记和特征抽取,在此基础上与桥梁模型进行精确匹配[3];另一种是根据水上桥梁分割大片水域的特点,先划分水域,然后通过水域找桥梁[4-5]。后者直接“瞄准”兴趣区,排除了复杂背景的干扰,工程实用性强,该方法一般有3部分组成:图像增强、水域分割及桥梁提取。由于桥梁的检测完全基于分割出的水域,所以水域分割的准确性显得尤为重要,水域分割成为整个方法的核心环节。因此,如何合理有效地分割水域是准确识别水上桥梁的关键。针对该问题,前人做了较多工作。文献[6]首先采用基于阈值迭代的分割和基于标准方差纹理图的分割等方法实现水域的分割提取[6];文献[1]采用像素梯度幅值和灰度值相结合的方法实现水域分割,利用形态学开运算、闭运算清除水域周围的毛刺尖角和空洞凹槽;由于航拍图像中往往存在大面积的田地,且灰度、纹理等特性与水域相似,文献[6]采用的水域分割提取算法由于选取面积最大的两块黑色区域作为水域,当桥梁处在图像边缘时,一侧水域分割后其面积大小不一定大于误分割出的田地,此时就无法准确确定水域。文献[1]采用的水域分割提取算法在图像二值化后,采用形态学算法处理也很难将大块的田地剔除出去,会给后续利用水域桥梁边缘信息进行桥梁检测带来较大困扰。另外,前人大都是基于水域灰度比桥梁灰度高的图像特性进行水域分割提取的,但实际情况下,由于天气环境、拍摄传感器类型不同等原因,有时水域比桥梁目标和周围田地背景灰度高很多,这时,以上算法均不适合。本文提出一种水域分割提取方法,既可以适用于水域灰度比桥梁目标灰度高的情形,也可以较好地排除大面积田地带来的分割干扰。
1 图像分割
1.1 预处理
实拍的桥梁目标图像原图和对原图采用拉普拉斯金字塔算法[9]增强后的图像如图1和图2所示。

图1 桥梁图像原图Fig.1 Initial image of bridge

图2 增强后的图像Fig.2 Enhancd image
由原图和增强后的图像可知,水域灰度相对田地(大部分)来讲灰度较高、梯度较小,水域的灰度大于平均灰度,而田地则相反。把灰度图像减去梯度图像可以拉大水域和田地之间的差异,通过对梯度图像加权可使差异更明显。加权方法如式(1)所示。

这样得到用于处理的图像为

其中:u为灰度图像的平均灰度;A为灰度图像;G为梯度图像。结果图像B如图3c所示。用传统OSTU分割算法进行分割,得到水域分割图像,如图3d所示。α为系数,控制拉大差距的程度。α越大,差距越大;α越小,差距越小。但α不能太大,太大了之后可能会使结果图像在水域中也为零,从而分割之后效果不好,如图3e所示;α也不能太小,拉不开差距,如图3f所示。α通常在1~3之间,本文对所有的图像取2。
传统的OSTU分割算法是通过阈值分割将图像分成两类C0和 C1(目标和背景),其中:C0={0,1,…,t};C1={t+1,t+2,…,m -1}。设分别为C0和C1两类的类内方差;ω0和ω1分别为两类的权值,则最优阈值应该在使式(3)最小时得到。
预处理和传统OSTU分割算法仿真结果如图3所示。
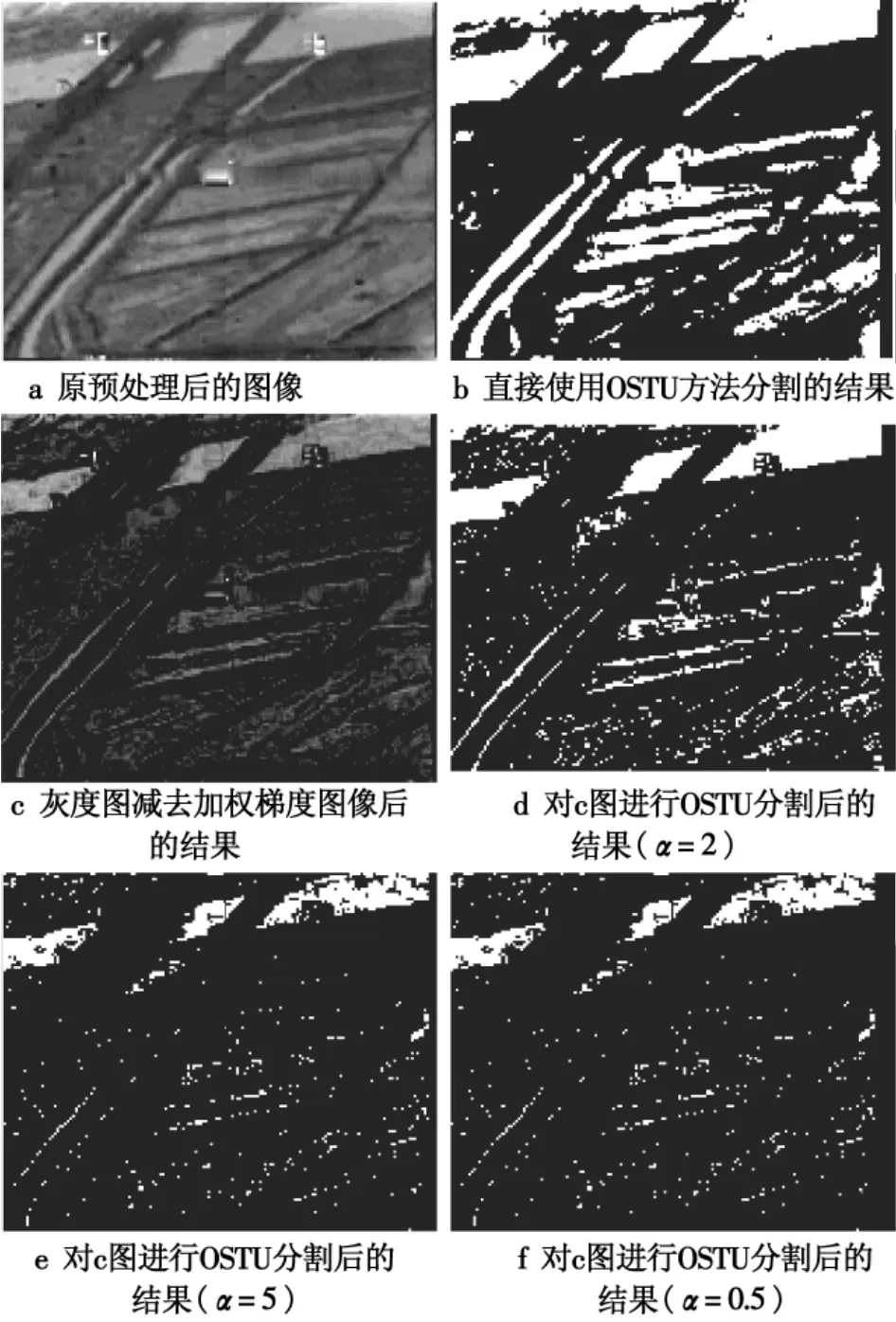
图3 预处理算法仿真结果Fig.3 Simulation results of pre-processing and traditional OSTU segmentation algorithm
由上述仿真结果可以看出,通过调节α系数,本文算法可以较完整地分割水域,保留完整的桥梁目标,更好地抑制田地带来的虚假目标。对于测试用图像序列,相对于α=5和α=0.5,α=2时采用传统OSTU分割算法分割图像效果最好,分割出的水域相对比较完整。
1.2 改进的OSTU阈值分割算法
传统OSTU分割算法是一种公认的比较有效的分割方法,使用范围较广,不论图像的直方图有无明显的双峰,都能得到比较满意的分割效果[7-8]。如图4a所示,但在实际工程应用过程中,有时可以看到大块的田地。如图4c所示,经过拉普拉斯金字塔算法增强后直接采用传统OSTU分割算法分割会将大块的田地误分割为水域,不利于后续的桥梁检测。
为了解决此问题,对传统OSTU分割算法进行改进,充分利用了水域平均灰度比整个图像平均灰度高的特点,设计出一种更为合理有效的水域分割方法。
改进的OSTU阈值分割算法实现步骤如下:
1)设增强后的图像为f(x,y),灰度级别范围为0~L,灰度级i对应的图像像素数为ni,图像总像素数为,初始化直方图数组 lHistogram[256]为零的步骤;
2)求增强后的图像的灰度直方图lHistogram[256]的步骤;
3)求增强后的图像灰度最大值maxGray的步骤;
4)求增强后的图像灰度平均值MeanGray的步骤;
5)设K为分割阈值,sum为最小类内方差值的步骤;
6)当K在MeanGray-maxGray之间取值时,依次求取对应sum值的步骤,具体计算公式如下
7)求出6)中求出的sum最小值所对应的K值,作为最佳分割灰度阈值的步骤;
8)利用7)中求出的最佳灰度阈值对原图像进行分割,得出最终的分割图像。
改进后的OSTU阈值分割法充分分析了机载环境下水上桥梁图像的灰度特点,利用了水域平均灰度比整个图像平均灰度高的特点,对传统OSTU分割法进行了改进,将进行类内最小方差法的灰度范围由[0,255]缩小为[MeanGray,maxGray],其中:MeanGray 为整幅图像的平均灰度值;maxGray为整幅图像的最大灰度值。由于用于判断阈值的灰度范围缩小平均灰度值到最大灰度值之间,使得大部分低灰度值的田地背景像素点不参与统计。因此,参与统计的水域图像与剩余田地图像差异缩小,更有利于求出较为精确的分割阈值。
改进的OSTU阈值分割算法仿真结果如图4所示。

图4 改进的OSTU阈值分割算法仿真结果Fig.4 Simulation results of the improved OSTU threshold segmentation algorithm
由实验结果可以看出,通过改进的OSTU阈值分割算法分割出的结果图像,错分为水域的田地面积大大减少,只有少数小面积田地错分为水域,完全可以通过后续水域标记处理,利用目标大小排除错分的小面积田地区域,保留大面积水域部分,从而实现合理有效的图像分割。
2 水域标记
图像分割后的水域和错划为水域的田地的区别一般是水域面积比较大,而且在后面检测桥梁的时候会用到桥梁两边是不同的水域这个知识,所以对水域进行标记,并统计各水域面积,去掉面积过小的区域可以为后面去除杂目标节省大量的工作。标记方法为普通的8-连通标记,具体方法如下所述。
对图像从左到右、从上到下进行搜索,假如当前像素的灰度值为0,则移向下一个位置;假如当前像素灰度值为1,则检查它左边和上边两个近邻像素,有如下4种情况出现:1)它们的灰度值都是0,给当前像素一个新的标记;2)它们中间只有一个灰度值为1,把该像素的标记赋给当前像素;3)它们的灰度值都为1且具有相同的标记,就将该标记赋给当前像素;4)它们的灰度值都为1但具有不同的标记,就将其中的一个标记赋给当前像素并做个记号表明这两个标记等价(两个近邻像素通过当前像素而连通)。
在扫描终结时所有灰度值为1的点都已有了标记,但有些标记可能是等价的。这时将所有等价的标记对结合,对各个对赋一个不同的标记。然后第2次扫描图像,将每个标记用它所在的等价对的标记代替。图5所示为标记图像用伪彩色显示的结果。

图5 水域标记结果Fig.5 Result of water area labeling
虽然在桥梁出现不久或者将要从图像中消失的时候,它一侧的水域面积比较小,但是大部分面积过小的标记区域都不是水域,所以选择去掉面积小于150个像素的标记区域,减少干扰。图6所示为最终的水域分割图。

图6 去掉小面积水域后的结果Fig.6 Result after removing small water areas
3 确定组成河流的水域
如图7b所示,虽然大部分田地中的高亮度部分在采用图像分割算法之后面积大大减小,可以通过去除小面积水域来去除,但是有时田地中高亮度水域面积比较大,直接在此基础上进行桥梁的检测会有较多假目标出现,给后续的排除工作带来很大的麻烦。关键问题在于水域不一定就是组成河流的水域,本文提出找到组成河流的水域的解决思路,这在以前的文献中是不曾提到的方法。

图7 河流水域提取仿真结果Fig.7 Simulation result of river area extraction
如图7a所示,由于水域的面积一般比较大,在河流上,沿着河流方向水域点通常多于非水域点,而田地中错分的水域与真正的水域或者其余错分的水域连接起来,则水域点的比例大都比较小,利用这个特点可以找到组成河流的水域。
4 总结
为了尽量减少田地干扰,本文采用对灰度图像减去加权梯度图像的方法对拉普拉斯金字塔算法增强后的图像做了进一步的预处理。为了进一步排除田地对水域分割的影响,利用了水域平均灰度比整个图像平均灰度高的特点,对传统OSTU分割法进行改进,解决了易将大面积田地错分为水域的缺陷,错分的田地面积较小。为了能去掉一些错分为水域的小面积田地的干扰,并且不使水域中的团块或岸边突起被错检为桥梁,对水域进行了标记。大部分田地相对于水域来讲面积比较小,去掉小面积水域后可以在基本保留真实水域的情况下,去掉大量的干扰区域。大部分田地中的高亮度部分可以通过去掉小面积水域来去除,但是有的面积较大的田地仍无法去除。为了解决这一问题,本文又提出了找组成河流的水域,不在所有的水域间找桥梁的思路,取得较好的水域提取分割结果,更有利于后续的桥梁检测与定位。仿真试验结果表明,本文提出的方法可实现水域的合理有效分割提取。
[1]唐林波,赵保军.一种航拍图像中水上桥梁的实时识别算法[J].电子学报,2007,35(3):511-514.
[2]姜骊黎,史册,杨海波.遥感图像中水上桥梁的识别[J].模式识别与人工智能,2000,13(2):214-217.
[3]徐胜荣,徐凡,叶秀清.基于知识的桥梁目标识别方法研究[J].模式识别与人工智能,1993,5(2):123-128.
[4]舒海燕.图象目标识别技术的研究与应用[D].西安:西北工业大学,2002.
[5]HOU B,LI Y,JIAO L C.Segmentation and recognition of bridges in high resolution SAR images[C]//Radar,2001 CIE International Conference on Proceedings,2001:479-482.
[6]马龙,李吉成,鲁新平,等.一种基于红外图像的桥梁识别定位方法[J].红外技术,2007,29(10):603-606.
[7]张辉,张道勇,何最红.灰度等级处理中的OSTU动态阈值法研究[J].传感器世界,2008,7:24-27.
[8]郑玉燕,何建农.基于数学形态学的SAR图像道路提取[J].PLC 技术应用,2008,24(8):293-294.
[9]陈浩,王延杰.基于拉普拉斯金字塔变换的图像融合算法研究[J].激光与红外,2009,39(4):339-442.
猜你喜欢
小火炬·阅读作文(2023年10期)2023-03-20 10:16:17
北京航空航天大学学报(2022年6期)2022-07-02 02:00:02
高技术通讯(2021年3期)2021-06-09 06:57:48
水上消防(2020年5期)2020-12-14 07:16:14
文史春秋(2019年11期)2020-01-15 00:44:36
智能城市(2018年7期)2018-07-10 08:30:00
小学生作文选刊(2017年2期)2017-12-05 01:19:18
自动化学报(2017年5期)2017-05-14 06:20:56
光学精密工程(2016年1期)2016-11-07 09:01:59
河北环境工程学院学报(2012年1期)2012-03-20 13:58:00
