
直升机雷达多功能兼容下的最优搜索设计
2011-06-05 13:29李佳洋李承志
火控雷达技术 2011年4期
李佳洋 沈 振 李承志
(电子科技大学 成都 611731)
1 引言
直升机相控阵雷达阵面小因此受能量时间的约束限制了其多功能任务的同时实现,怎么在能量时间受限的情况下最优化的实现雷达的同时多功能的任务,这就需要我们深入的研究。直升机雷达具有多种功能,包括搜索、跟踪、敌我识别、无源探测、通信、地形回避等等,其中通信功能的工作过程是当雷达天线转到接收站时,计算机根据存贮器中的内容及当前的信息进行数据处理,与接收站联系,构成数据通信链路,进行信息交换,这种信息交换是在主站和从站天线方向图的重叠区内进行,当天线转过接收站后,计算机撤除通信链路,转去执行其它的工作[2]。因此通信功能也要占用一定的波束资源。而搜索是直升机雷达最主要的功能,所以怎样在多种功能占用资源的情况下最优化搜索设计是本文所要考虑的情况。
2 雷达多功能兼容时序设计
直升机雷达除了可以单独的实现搜索、跟踪、无源探测、电子侦查、敌我识别、通信及地形回避等,还能同时执行多种任务,如主动搜索+敌我识别+通信等等。通过控制脉冲工作时间并适当的增大雷达搜索周期,可以实现搜索和敌我识别与通信的兼容[3],时序关系如图1所示,有两种兼容方式。
从图1看出兼容方式的两种时序设计,第一个是正常的搜索时序图。第二个是兼容时序设计方式1,在一个搜索脉冲信号后是一个多功能兼容脉冲,根据任务优先级别决定其执行跟踪、通信、敌我识别等中的一个任务。第三个是兼容时序设计方式2,在一个搜索脉冲信号后是四个多功能兼容(包括跟踪、通信、敌我识别等)脉冲。
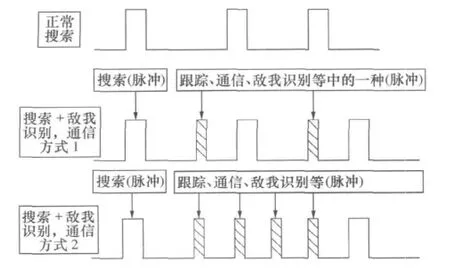
图1 主动搜索与敌我识别、通信兼容的时序示意图
3 雷达多功能兼容下搜索参数的设计
直升机雷达在执行搜索的同时,必须处理各种高优先级的任务。但是随着这些高优先级任务对雷达资源的占用,必然导致雷达搜索资源的减少。在这种情况下,直升机雷达通过适当调整搜索参数来适应搜索资源的减少[4]。本文主要以搜索帧周期和每个波位上的探测距离(或每个波位上的驻留时间)来进行分析。
假设相控阵雷达的总资源为1(即100%),初始状态(搜索资源能够满足)下分配给雷达搜索任务的资源百分比为SR0(≤1),对应的最佳搜索帧周期为Tf0,探测距离为R0,分配给其他的高优先级任务(包括跟踪,敌我识别,通信等多功能)的资源比例为TR0(即1-SR0)。R0为直升机雷达单次观测的检测概率为 Pd0所对应的距离,相应的信噪比SNR0。当高优先级的任务所需的资源为 TR(>TR0)时,实际分配给雷达搜索任务的资源百分比为SR,搜索帧周期Tf和探测距离R可通过表1中的3种策略进行调整以适应搜索所占资源的减少。

表1 搜索资源下的的参数调整策略
以上三种策略具体实施细节为:策略1,AFP是调整直升机雷达的搜索帧周期来适应搜索所占资源的减少,而保持雷达的探测距离不变。策略2,ADR是调整雷达的探测距离而保持雷达初始的最优搜索帧周期不变。策略3,AFPADR是综合策略1和策略2,同时改变雷达的搜索帧周期和探测距离,在有限的搜索资源下求得最优的搜索帧周期和探测距离使得直升机雷达的搜索性能达到最优。
在其他条件一定的情况下,雷达的探测距离的4次方和搜索所占资源成正比;搜索帧周期和搜索所占资源成反比,有如下关系:
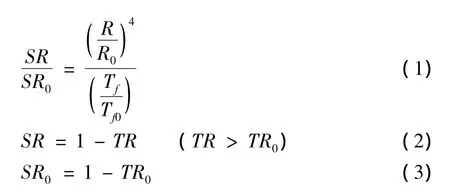
当 TR ≤ TR0时,Tf=Tf0,R=R0。当 TR ≥ TR0时,根据直升机雷达的指标,我们设SR0=1,TR0=0,Tf0=8s,R0=25km。图2给出了不同的搜索方式所占资源下,搜索帧周期和雷达探测距离的关系曲线。

图2 不同搜索方式所占资源下的搜索帧周期和探测距离关系
从图2中可以看出,随着搜索所占的资源的减少会伴随着雷达探测距离逐渐降低以及搜索帧周期逐渐增加的趋势。因此对于一个给定的搜索资源,搜索帧周期的增大会使雷达探测距离相应的增大。
4 雷达多功能兼容下搜索性能优化模型
在资源受限情况下参数最优化准则是:适当调整直升机雷达的搜索参数使得跟踪起始距离达到最大[4]。这里的跟踪起始距离Rc,为对某一特定的目标,积累检测概率达到Pcd的距离值。设直升机雷达通过M次扫描达到了设定的积累检测概率。则:式中:Pdi为雷达对目标每次观测的检测概率。假设目标的径向速度为v,搜索帧周期为Tf,因此目标在两次被照到的过程中,径向飞行距离为:


设雷达的最大作用距离为Rs,那么由式(4)可得M=(Rs-Rc)/Δr。设直升机雷达达到其设定的积累检测概率的最终距离为Rc+r(0≤r≤Δr)。则
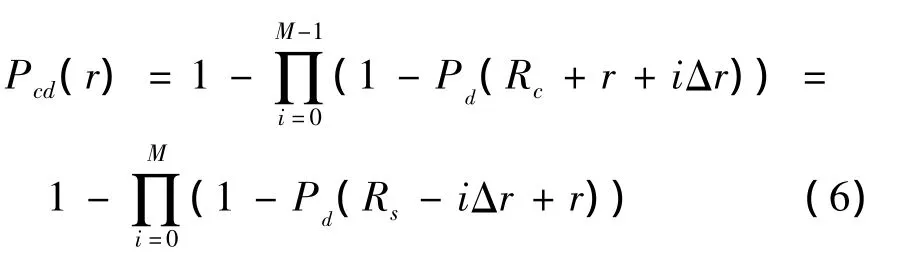
这里的Pd(Rx)表示对目标在距离为Rx时的检测概率。如果r在[0,Δr]内服从均匀分布,那么平均累计检测概率为:


直升机雷达的目标一般为地面目标,如雷达站、坦克、装甲车等地面目标,是慢起伏目标,因此采用Swerling I型目标,Swerling I型属于目标慢起伏,脉冲与脉冲间相关,扫描与扫描间独立,适用于雷达分辨单元内有大量独立随机起伏的散射体,且没有一个散射体起主要作用的情况[5]。所以目标单次观测的检测概率和信噪比的关系式为:

式中:Pfa为雷达检测时所设置的虚警概率。对于距离为Rd的目标。雷达对其进行观测的信噪比为:

则由式(12)得出此次观测的检测概率为:

将式(14)代入式(11),得:


上式(16)、(17)为相控阵雷达搜索性能优化模型,即为对不同的SR,参数R,Tf,在满足式(17)的条件限制下,使得式(16)的Rc取极大值问题。图3给出了在目标速度为330m/s的情况下,SR0=1,TR0=0,Tf0=8s,R0=25km,最大探测距离40km,检测的虚警概率为10-4,信噪比为12dB,雷达搜索任务所占百分比SR=0.6(即60%)时搜索帧周期(或探测距离)与Rc的关系曲线。从图3中可以看出在有效的搜索帧周期范围内Rc的变化趋势是先从某一个较小值逐渐上升达到其最大值(对应着最优搜索参数),然后再逐渐下降。

图3 跟踪起始距离随搜索帧周期的变化曲线
从上面相控阵雷达搜索性能优化模型可以看出,搜索帧周期,探测距离跟踪起始距离3个参数之间存在着非线性的制约关系。而Rc不能直接计算出来,因此要求算出Rc满足式(17)的最大值。
5 仿真结果与分析
采用一个有跟踪,通信任务抢占搜索资源的场景来验证优化模型的有效性,这里我们取在目标速度为 330m/s的情况下,SR0=1,TR0=0,Tf0=8s,R0=25km,最大探测距离40km,检测的虚警概率为10-4,信噪比为 12dB,分别对三种策略 AFP,ADR,AFPADR进行了仿真,在第一种策略AFP,我们保持探测距离不变等于R0,对应式(17)增大搜索帧周期Tf。对于第二种策略ADR,我们保持搜索帧周期不变等于Tf0,对应式(17)减小探测距离R。对于第三种策略AFPADR,我们增大搜索周期为10s,对应式(17)不同搜索资源下探测距离减2km。
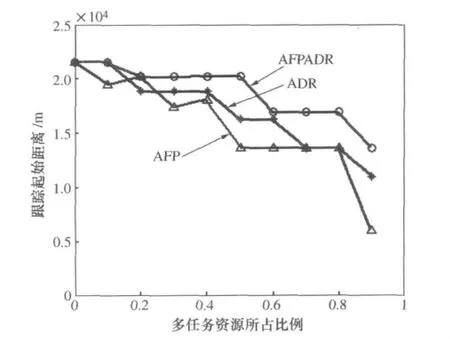
图4 不同多任务资源下的搜索性能曲线
从图4可以看出针对目标策略AFPADR得到的性能最优,ADR的性能要优于AFP的性能。通过仿真可以得到结论:a.搜索资源受限下,搜索检测性能会有一定程度的降低;b.AFPADR策略可以在搜索资源受限下保证系统搜索的最佳性能。
6 结束语
本文主要研究了在直升机雷达多功能兼容下,高级优先级任务抢占搜索资源时,搜索的优化设计。本文应用3种策略分别来调整搜索帧周期和探测距离以适应搜索所占资源的减少。最终得出AFPADR策略可以在搜索资源受限下保证系统搜索的最佳性能。
虽然本文对在多功能兼容资源受限下搜索的策略设计,但还需对在宏观层面进行任务规划,在微观层面进行驻留请求的调度。还有本文所阐述的搜索资源受限下的搜索参数优化设计准则不仅仅适用于搜索帧周期和探测距离的设计上,对于其他搜索参数同样适用。
[1]杨红娟.美俄主要武装直升机及其机载毫米波火控雷达发展现状[J].火控雷达技术,2004,33(3):69 -72.
[2]李廷军,任建存,赵元立,张金华.雷达一通信一体化研究[J].现代雷达.
[3]李秀良,付林.舰载一体化多功能雷达系统多功能集成与资源管理技术研究[J].雷达与对抗.
[4]胡卫东,郁文贤,卢建斌.相控阵雷达资源管理的理论与方法[M].北京:国防工业出版社.
[5]马建春.机载雷达回波模拟和动目标检测技术研究[D].电子科技大学.
[6]张光义,赵玉洁.相控阵雷达技术[M].北京:电子工业出版社.
[7]贲德,韦传安,林幼权.机载雷达技术[M].北京:电子工业出版社.
猜你喜欢
导航定位学报(2022年5期)2022-10-13
环球时报(2022-09-15)2022-09-15
军事文摘(2022年15期)2022-08-17
中学生数理化·中考版(2022年6期)2022-06-05
小猕猴智力画刊(2022年3期)2022-03-28
中学生数理化·中考版(2021年6期)2021-11-22
新世纪智能(数学备考)(2021年4期)2021-08-06
新世纪智能(数学备考)(2021年4期)2021-08-06
铁道建筑技术(2020年11期)2020-05-22
电子制作(2017年13期)2017-12-15
