
线性功率放大器模型设计及其系统辨识
2011-06-04 04:36谢耀李久芳
电子工业专用设备 2011年10期
谢耀,李久芳
(中国电子科技集团公司第四十五研究所,北京 101601)
线性功率放大器,它是以功率运算放大器为核心的功率驱动模块,因此它的设计和计算类似于一般的运算放大器,当然在采用了扩展电流后级驱动时,同样也可以按一般运算放大器的“虚地”和“虚断”概念来计算。在一个运算放大器、功率放大器、电流电压反馈等环节组成的复杂系统中,要抓住主要环节进行简化等效,切不可对每个环节建模计算,那样只会使模型建立复杂而难以实现,等效的环节必须表征它的特性。这里我们只探讨一般原则如何构建一个完整的系统模型,并对此进行分析计算来辨识整个系统的特性!
1 系统数学模型
数学模型包含驱动器、电机、机械负载、反馈环路等,由这几个部分组合成整个系统的传递函数,然后利用MATLAB对传递函数的方框图进行分析辨识。在我们做传递函数时,为了分析的方便,按照功能模块来计算传递函数,每个模块的传递函数代表一个特定的含义,这样我们就可以一目了然的对整个系统做清晰的概括,比如前置低通滤波、电压和电流放大与反馈、电机、机械负载等传递函数,通过仿真计算就可知道设计中需要修改矫正哪些环节,以便达到最佳的系统运行状态。
1.1 线性放大器数学模型
图1是一种线性功率放大器原理图的简图,我们以直线电机的驱动为例,为了分析方便对实际原理图进行了简化,但这并不影响对系统数学模型的建立。

图1 线性功率放大器原理图
在图中由R0R1C0组成了输入端的T型滤波器,可以较好的对高频干扰信号进行抑制,C1C2R4R5组成比例积分环节,可以改善动态性能和较好的稳态电压输出,R3R7组成电流反馈环节,可以对电流进行深度负反馈,从而稳定给定的输出电流,以控制电机的输出力矩。功率放大器以PA12为例,它具有较高的功耗,最高可达120W,峰值电流可达10 A以上,R6R'6为限流电阻,目的是对驱动器进行限流保护,包含在反馈环节的节点内部,所以在数学模型中与它是没有直接关系。
根据运算放大器基尔霍夫电流叠加定律的原理有:


设直线电机的内阻为Rm、电感为Lm、反电动势常数为Ke,在计算中忽略反馈电流Ifs(s)的影响,既可以认为:I0(s)≈Im(s)
则根据电流电压方程可以直接按积分算子S写出如下几组电流电压方程:
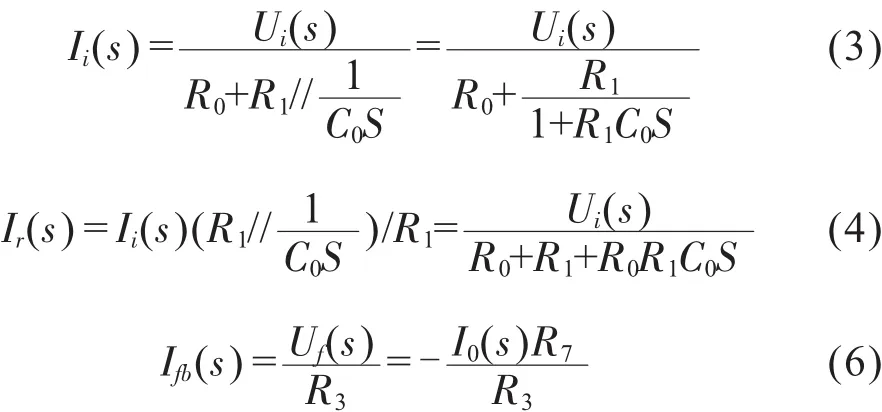

(其中Z-1(S)是C1、C2、R4、R5回路等效阻抗算子的倒数)
由式(2)、(6)、(7)可写成如下表达式:

即有:

设直线电机的位移为X(t),

根据电压平衡方程可以写出如下表达式:

即有:

其中,E(s)=Ke·X(s)代表了电机的反电动势传递函数,它一个与位移相关的函数,位移大小与反电动势成正比。一般情况下,由于Rm要远远大于电流采样电阻R7,那么τm就完全反应电机的电感时间常数了。
1.2 直线电机系统数学模型
一般情况下,直线电机系统可以等效成一个简单的机械模型。假如系统运动部分质量是m,电机的推力为F(t),机械系统的弹性系数为Km,黏性阻尼系数是Kc,由于机械运动负载为一个贯性负载,因此机械运动可以等效成单一自由度的弹簧-质量-阻尼器的机械位移运动,如图2所示,图(a)是它的运动力学模型,图(b)是它的等效模型图。

图2 直线电机机械系统模型
则直线电机的力平衡方程可以写成如下表达式:

我们知道直线电机的推力F(t)与电机线圈中的电流是一个接近线性的比例关系,设力常数为Kf,则有:

即:

1.3 系统的传递函数方框图
由式(8)放大器输出电压与给定输入电压传递函数、式(9)放大器输出电流与电压的传递函数、式(11)电机位移与驱动电流的函数,我们可以写出系统的传递函数,为了讨论方便,我们不再进行传递函数的简化计算,事实上做这样的简化计算也是得不偿失且没有必要的,过程繁杂,我们直接绘出系统传递函数结构图,对其结构图进行考察。因为直线电机的电流大小反应驱动力矩的大小,驱动力与速度、加速度等关联,为此我们将研究输出电流的特性与所给定的输入电压之间的关系。从下面我们会发现系统传递函数全面表征了电气、机械等关键环节的特性,比如电流、电压、时间常数、质量、位移等物理量,方框图如图3所示。

图3 系统传递函数方框图
2 采用MATLAB进行分析仿真
2.1 最优化参数选定
知道了系统的传递函数方框图,我们就可以直接在MATLAB上仿真,已知:
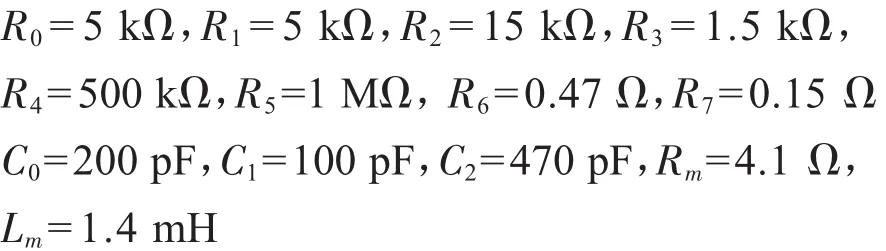
且机电、负载参数如下:

则可得:

采用阶跃输入,通过MATLAB仿真,我们可以看到输出有较大的超调量,如图4的1号曲线。

图4 不同时间常数的阶跃响应曲线
过大的超调是我们不希望看到的,我们希望减少超调量的同时不要使上升时间下降太多,改变一组参数,取 R4=390 K ,C1=47 pF,C2=1000 pF,其它的参数不变。
则可得:


通过MATLAB仿真如图4的2号曲线,我们可以看到虽然没有了超调,但上升时间变慢,这也是我们不希望看到的,再次改变一组参数,取R4=510 K,C1=47 pF,C2=680 pF,其它的参数不变。
则可得:


通过MATLAB仿真,如图4的3号曲线,我们可以看到,选定这组参数,不但上升时间有所减少,超调量也减少了许多,是一组比较理想的参数。
图5是我们通过MATLAB仿真做出的幅频特性和相频特性曲线。

图5 不同时间常数的幅频和相频特性曲线
2.2 结果分析
在阶跃响应中,利用MATLAB上可以截获到,图4中 1号曲线,超调量 11.7%,上升时间101μs;2号曲线无超调,上升时间111μs;3号曲线超调量0.6%,上升时间87μs。在实际设计中,我们不要小看上升时间这20μs的变化,这些变化足以提高或者降低差不多1 kHz左右的带宽性能!
在幅频和相频响应曲线中我们可以看到,也获得了较好的特性,有不小于50~60°的相位稳定裕度角,带宽达到了5 kHz。
利用MATALAB我们很容易的进行系统仿真辨识,极大地简化了非常复杂的数学计算,在计算机的辅助设计中,通过优选配置、矫正等手段,能够比较容易地建立最佳的控制系统。在采用阶跃输入和正弦输入方式时,我们都做了具体的测试,通过实际测试也验证了理论仿真与实际测试基本一致性,对实际测试的数据不再一一列举。只要掌握了模型设计的传递函数、系统的机电参数等,就可以对一个系统加以评判!
[1]王建辉,顾树生.自动控制原理[M].北京:清华大学出版社,2007.
[2]胡寿松.自动控制原理[M].北京:科学出版社(第四版),2007.
[3]陈幼平,杜自强,艾武,周祖德.一种短行程直线电机数学模型及实验室研究[J].中国机电工程学报,2005,25(7):32-36.
[4]罗建强,张伟军.基于labW IEW软件的音圈电机驱动系统模型辨识方法[J].计算机应用技术,机械2007,34(2):15-18.
猜你喜欢
科教导刊·电子版(2022年5期)2022-03-19
测控技术(2018年7期)2018-12-09
小学生导刊(2018年13期)2018-11-30
科学与财富(2018年25期)2018-10-19
航空工程进展(2018年3期)2018-08-31
数学小灵通·3-4年级(2017年10期)2017-11-08
小学生导刊(低年级)(2017年2期)2017-06-10
光学精密工程(2016年4期)2016-11-07
电测与仪表(2014年11期)2014-04-04
幼儿时代·故事妈妈(2004年4期)2004-03-17
