
基于六维机械手的硅片传输系统
2011-06-04 04:36李伟,陈威,王伟,柳滨
电子工业专用设备 2011年10期
李 伟,陈 威,王 伟,柳 滨
(中国电子科技集团公司第四十五研究所,北京 065201)
集成电路(IC)制造是电子信息产业的核心,是推动国民经济和社会信息化发展最主要的高新技术之一。发达国家国民经济总产值增长部分的65%与IC工业相关,而全球90%以上的IC都要采用硅片。硅片传输系统是一类面向集成电路制造业,综合利用机械、电子、光学、计算机等技术,通过编程或示教的方式,在IC制造的各个工艺模块间精确、快速地传输并定位硅片的,具有高精度、高洁净度和高可靠性的自动化传输系统。它针对IC制造的工艺精度和净化要求,借助工业机器人和工业自动化技术,在超洁净或真空环境中向各个加工设备输送硅片。硅片传输系统作为IC生产线的高精度、高速度和高洁净的自动化传输设备,直接体现出整机系统的自动化程度和可靠性。因此,用于这样环境的自动化传输系统已成为IC制造装备中的关键部件。
1 工程应用
化学机械抛光(CMP)是一种对半导体材料或是其它类型材料的衬底进行平坦化或抛光的方法,广泛应用于集成电路(IC)制造业中。CMP设备实现的功能是结合抛光液中化学溶液的腐蚀和磨粒的机械磨削双重作用,从而使硅片获得极高的平面度和平整度[1]。
传统的抛光(CMP)设备采用的2台或3台三维或四维机械手组合来构建硅片传输系统,一方面由于机械手数量增加而增加成本;另一方面多台机械手的使用无形中增加了设备的整体尺寸。这势必会造成设备成本负担加重和相应的净化间厂房面积和成本增加。针对上述问题本系统采用单台六维机械手,有效地减少了方案采用机械手的数量。六维机械手姿态调整,不需要三四维机械手所需的大空间,这样,减小了设备的整体尺寸。同时该机械手装置与方案优化组合,使机械手只需通过末端执行器的干湿转换,就可实现干燥硅片的传入和抛光后湿润硅片的传出,进一步减小了机械手的设计数量和设备整体尺寸。
基于六维机械手构建了硅片传输系统。硅片传输系统的传输工位由以下工艺模块组成:前端硅片装载单元(LoadPort)、干末端执行器、湿末端执行器、湿硅片装载单元、硅片装载台、硅片中转单元和硅片卸载台等构成,如图1所示。
硅片传输系统要求是“干进湿出”,硅片传输系统是六维机械手通过换枪盘连接干末端执行器和湿末端执行器,然后机械手运动到指定工位后由上位机实时控制末端执行器抓取和释放硅片。因此六维机械手的选型又是传输系统的重中之重。从以下几个方面考虑,确定机械手选型[2]:
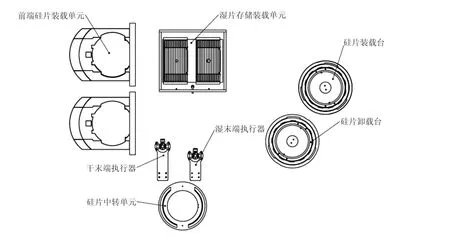
图1 传输工位构成
(1)使用环境。不同的环境会有专门定制的工业机器人,比如喷涂行业需要的是有防暴能力的工业机器人,这与标准的机器人就有所不同,还有洁净室的使用等等。应用于半导体行业的机械手应选用洁净室机械手。
(2)目前使用的机械手末端执行器(End-effector)。一般是气体驱动或电器驱动,无可避免的会有相应的气管或电缆连接。如果机械手的气路和电路回路是外置,则机器人运动时需特别小心;若机械手的气路和电气回路是内置,这种方式较为方便,只要考虑手臂和末端执行器的相对运动时线缆的管理即可。针对大尺寸(12英寸、16英寸)的硅片采用真空吸附方式会产生较大的污染,所以选用夹持式末端执行器。
(3)合理评估有效负荷和惯性。通常多数是在计算负荷时未将机械臂末端所装工具的质量包括在内。其次是低估或者完全忽略了偏心负荷产生的惯性力。惯性力有可能造成机器人6轴的超负荷。由于我们采用两个不同的末端执行器传输干硅片和湿硅片。所以我们在机械手第六轴和末端执行器之间引入换枪盘(Tool changer)去实现机械手分别与两个末端执行器的连接和释放。
根据末端执行器和硅片产生的静负载力矩、更换频率和净室要求选择合适的换枪盘。

式中:M1为硅片质量,M2为末端执行器的质量,L为力臂。
考虑与机械手第六轴和末端执行器安装方便性,确定本系统所使用的换枪盘,机械手总负荷为1 077.6 g。
(4)忽视了机器人应用的相关设备示教器、通讯电缆以及一些特殊的软件通常是必须的,但是在最初的订购中很容易被遗忘。这些将导致整个计划的耽搁甚至费用超过预算。要正确地挑选机器人产品时,首先要考虑自己综合需求以及满足设备选择的各个方面。说明示教盒是机械手调试时很重要的部件。
(5)行程确定时,不能只按照机器人技术参数的行程来确定是否可以达到应用的要求,应该要实际考虑到末端执行器安装后,机器人的运动轨迹是否可能达到行程所需。这也是要进行模拟仿真的关键原因之一。我们可以应用SolidWorks软件进行简单模拟以确认所选机械手能否满足各个工位的行程要求和姿态要求。
根据以上几点,反复模拟分析最终我们选用某厂家XX型六维机械手,其基本参数如为:
1) 净室等级SCR-Cleanroom达到class 2 cleanliness(标准为 ISO 14644-1)。
2) 全封闭结构,内部集成用户端的电气信号接口,前端有气路输出接口。只需要将前端气路输出接口与换枪盘的“锁紧”和“解锁”气体接口连接即可。
3) 最大负载5 kg,额定负载2 kg。我们设计的传输系统载荷略大于1 kg。
4) 配备人性化设计的示教盒。这个手持终端结构轻巧(700 g),人性化设计,可以在机械手编程、维护、监控种种应用中发挥优势,并提供一定的安全保障功能。六维机械手具有相对独立的控制系统和编程软件。它通过以太网与上位机进行运行参数和指令等数据传输和通讯。控制器是控制全系列机器人的唯一平台。六维机械手通讯控制示意图,如图2所示。

图2 通讯控制示意图
5) 工作行程为920 mm,可重复精度为±0.03 mm。我们利用SolidWorks软件对硅片传输工位进行模拟。机械手采用置顶安装方式。图3为模拟装载台工位放片机械手姿态图,图4为模拟卸载台工位取片机械手姿态图。
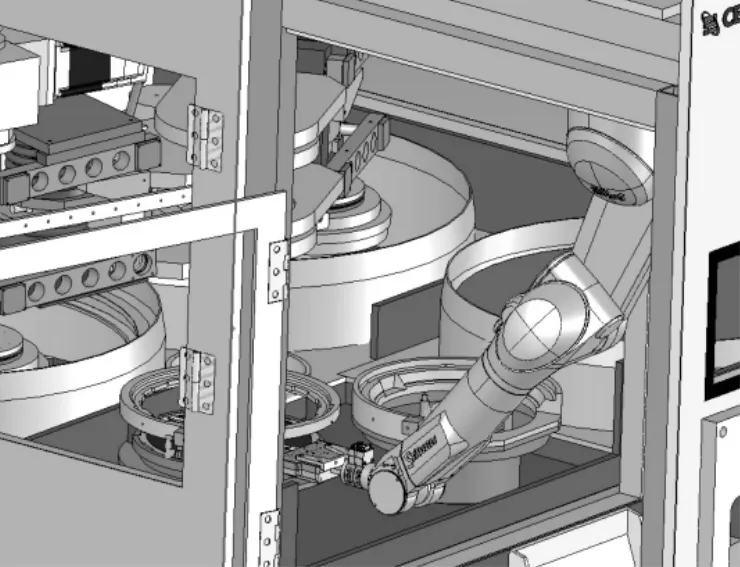
图3 装载台工位
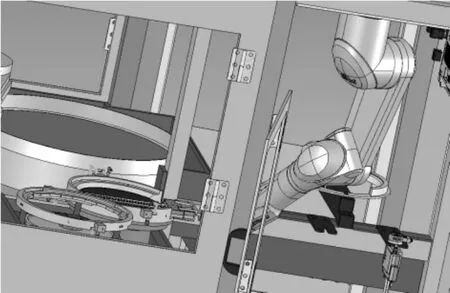
图4 卸载台工位
通过以上分析、模拟,最终确认了适合本系统应用的六维机械手XX。然后完成机械手路径规划。所谓机械手路径规划是指给定移动机械手的初始位置及机械手末端的目标位置,在移动机械手各广义坐标的工作范围内寻找一条无碰撞路径[3]。我们根据机械手的初始位置及利用示教盒示教的机械手末端的目标位置,插补一些中间点,从而调整机械手在坐标系的工作范围内寻找一条无碰撞路径并达到合理的运动路径。机械手路径规划一步一步确认好后,增加和完善传输系统中对应的电磁阀开关动作(换枪盘解锁和锁紧气体通断、末端执行器指钩的伸缩等等)。
2 工作原理
1)初始化。六维机械手处于系统零点(也就是动作的初始点)。上位机将前端硅片装载单元片盒中硅片存储信息传递给机械手。
2)前端硅片装载单元取片。六维机械手连接干末端执行器,锁紧气体打开。锁紧后机械手运动到前端硅片装载单元(LoadPort)片盒中指定位置后,上位机通过机械手、换枪盘将末端执行器抓取硅片的动作指令传递给末端执行器,然后末端执行器执行抓取硅片的动作。
3)中转台放片。六维机械手运动到中转台处,上位机通过机械手、换枪盘将末端执行器释放硅片的动作指令传递给末端执行器,然后末端执行器执行释放硅片的动作。
4)换手。六维机械手运动到指定位置后,换枪盘“打开气体”打开,释放干末端执行器。然后机械手运动到指定位置后,“锁紧气体”打开,连接湿末端执行器。
5)中转台取片。六维机械手按规定好的路径运动到中转台处,上位机通过机械手、换枪盘将末端执行器抓取硅片的动作指令传递给末端执行器,然后末端执行器执行抓取硅片的动作。
6)若设备抛光区域对应硅片的接受工位。装载台没有硅片时,机械手将硅片传送至该工位,控制湿末端执行器释放硅片。若设备抛光区域对应硅片的输出工位——卸载台没有硅片时,机械手运动到该工位,控制湿末端执行器抓取硅片。
7)机械手从卸载台抓取硅片后,机械手运动到湿片存储装置对应位置,控制湿末端执行器执行释放硅片的动作。
当然,CMP设备的硅片传输系统远比上述复杂,要根据各个工位对应传感器的实时检测状况和动作的优先级去灵活执行相应的动作。但究其本质,都是上述流程不同方式的组合而已。
3 结 论
基于六维机械手的硅片传输系统在国内少有介绍。本文基于六维机械手、换枪盘和末端执行器成功构建了硅片传输系统,通过几个方面分析和软件模拟确认合适的机械手型号,然后示教出满足系统要求的合理路径规划,满足实际应用要求。现在六维机械手硅片传输系统稳定、高效、精确地运转在设备中。
[1]闫志瑞,鲁进军,李耀东.300mm硅片化学机械抛光技术分析[J].半导体技术.2006,8(31):561-564.
[2]梁琪.工作机器人应用的十大误区[J].机器人技术与应用.2005(05):29-30.
[3]李新春,赵冬斌,易建强.一种移动机械手分级协调路径规划方法[J].制造业自动化.2005,27(05):28-32.
猜你喜欢
现代经济信息(2022年26期)2022-11-16
金刚石与磨料磨具工程(2019年4期)2019-09-18
测控技术(2018年12期)2018-11-25
制造技术与机床(2018年11期)2018-11-23
河北农机(2017年12期)2018-01-20
能源(2018年10期)2018-01-16
制造技术与机床(2017年9期)2017-11-27
制造技术与机床(2017年4期)2017-06-22
通信电源技术(2016年1期)2016-04-16
自动化学报(2016年8期)2016-04-16
