一种机器人末端操作器的抓握研究
2011-05-30 09:46朱映远倪风雷
中国机械工程 2011年13期
朱映远 倪风雷
哈尔滨工业大学,哈尔滨,150001
0 引言
随着人类空间活动的不断发展,以及航天飞机、宇宙飞船和空间站的建立,大量的空间生产、空间加工、空间装配、空间维护和修理需要完成。由于空间环境的特殊性,利用机器人以及配置在机器人末端执行任务的操作器可以大大减小宇航员从事危险工作的代价和成本[1]。这种特殊工况对机器人末端操作器提出了更高要求,即不仅要有更大的捕获空间、更小的质量,还要能够对漂浮目标实现对接或抓握。目前,典型的空间机器人末端操作器有欧洲航天局的 ROTEX、NASDA的ETS-VII以及德国的ROKVISS[2-5]。空间捕获或对接过程中,相互作用力是一个研究难点,过大的碰撞力或碰撞力矩会使机器人或目标器发生较大翻转或偏移,造成事故[6]。因此减小碰撞力和力矩是空间捕获的一个重要研究内容。笔者研制了一种末端操作器并建立了漂浮目标模拟平台,对研制的末端操作器进行了捕获测试,利用六维力/力矩传感器对不同轨迹规划进行了试验,通过六维力/力矩传感器测量了轨迹不同时捕获对基座的作用力和力矩。
1 系统研制
1.1 末端操作器
以往的机器人末端操作器面对的目标一般为固定目标,而本次研究的操作器则是可以对处于漂浮状态的目标(即具有六维自由状态的目标)进行捕获抓握的特殊操作器。
末端操作器的构型选择蜗轮蜗杆传动的三指形手爪,该结构具有结构紧凑、自锁能力强的特点。采用单蜗杆带动对称布置的双蜗轮结构,使得蜗轮以及连接在蜗轮上的手指获得对称转动,由V形槽、手指等捕获定位机构对目标进行精确抓握和定位,如图1所示。
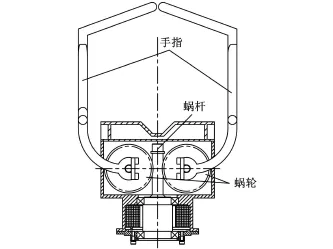
图1 末端操作器原理图
工作过程中,操作器随机器人运动接近目标接口,当接口进入抓握位置时,由蜗杆驱动蜗轮和手指,手指运动推动目标接口依序完成闭合和锁紧动作,直至将目标接口压入V形槽,结束捕获过程。V形槽对目标器产生4个约束。手指采用斜楔形结构,插入目标器后部,产生1个约束。
1.2 测试平台
为了测试末端操作器对漂浮目标的抓握性能,研制了末端操作器抓握测试台。抓握测试台包括基于气浮台和六自由度模拟器的目标系统以及基于手眼视觉的检测系统,如图2、图3所示。

图2 六自由度目标模拟器
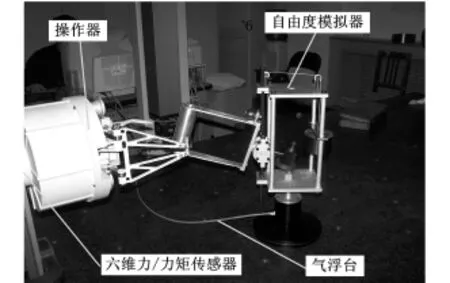
图3 操作器测试系统
目标器安装在模拟器上,模拟器放置在气浮台上,利用气足和气泵,目标和模拟器在气浮台上处于近似无摩擦的情况下获得水平方向的二维平动以及一维的转动;利用模拟器可以实现竖直方向平动、水平方向转动的3个方向的自由漂浮状态。
为了检验抓握效果,在末端操作器和固定基座之间装有六维力/力矩传感器(型号为 JR3)。JR3传感器可以实时检测3个沿着轴向的力Fx、Fy、F z和 3 个绕着轴向的力矩 M x、My、Mz,将采集到的数据通过数据线连接到PC机上,从而实现了对力/力矩的同时检测与处理。如图3所示,六自由度模拟器携带目标器放置于气浮台上,实现六自由度漂浮状态。操作器通过传感器和安装板与立柱固定在一起,相当于操作器安装在固定的机器人末端。此外在操作器内部装有电机电流、电机/手指角度传感器,可以测得手指实际运行速度。
在不同轨迹抓握过程中,由于对接和碰撞,操作器会受到目标器的力和力矩影响,不同的抓握轨迹会有不同的力和力矩。因此,六维力/力矩传感器可以记录下整个抓握过程中操作器在不同方向所受的力和力矩。
2 抓握研究
2.1 抓握定位分析
机器人末端操作器的工作过程实质上是和目标器的对接过程。在对接过程中,由于手指和目标器发生接触而产生碰撞,所以有必要对几种最为恶劣的情况进行分析。
首先建立工具坐标系,其中Y轴沿操作器主轴方向(亦即机器人末关节轴线方向),Z轴方向沿手指对称面,和Y轴方向垂直,X轴是和Y、Z轴垂直的一个轴,根据右手法则确定其方向。
在末端操作器抓握过程中,目标器接口在X轴方向位置发生偏移,如图4a所示。由于手指对称运动,相向夹紧,目标器会被手指推入中线位置,克服这个偏移。
目标器接口沿X轴方向会发生转动,如图4b所示。这个转动由于受到阻挡杆的阻碍,转动角度小于90°,不会发生超越目标器而不可抓握的情况。由于操作器手指和目标器接口是线接触,因此可以随着目标器的夹紧将目标器摆正送入操作器V形槽中。
目标器接口在Y轴方向位置会发生偏移,如图4c所示。在Y轴方向发生位移,即在垂直于V形槽的方向靠近和离开手爪端面。由于手指会向中间均匀挤压,目标器把柄会被推入中间的V形槽中;而由于手指已经将目标器包络,目标器无法向外逃逸,会随着手指运动被包回来。因此,Y轴位移可以被克服。
目标器接口沿Y轴方向会发生转动,如图4d所示。这种情况的抓握过程与在X轴方向发生位移相似。
目标器接口在Z轴方向位置会发生偏移,如图4e所示。Z轴方向位移,是由手指上的斜楔面克服的。在夹紧过程中,手指相对运动。单手指一侧运动使目标器无法逃逸,与之配合的双手指一侧楔形面会逐步插入支撑板之间。随着斜楔插入量增大,目标器被迫沿斜面改变位置,最终到达预定位置。
目标器接口沿Z轴方向会发生转动,如图4f所示。这种情况和X方向转动相似,同样是由于斜楔面插入目标器后侧,逐渐限制目标器Z方向位移造成的。由手指根部的限位柱推动目标器支架,克服这个自由度实现粗定位,最后由目标器的小平面和V形槽配合实现这一自由度的最终定位。

图4 几种典型的位姿偏移情况
上面所列的是6种基本位姿偏移,其他位姿偏移均可以视为以上几种偏移的叠加。由此可知,针对各种情况的位姿偏移,手爪都具有大范围的捕获能力,并且利用目标器接口的V形面、手爪系统的V形槽、双手指的根部以及限位柱实现了对目标器接口自由度的限位,获得较高的定位精度。
2.2 操作器轨迹规划
操作器捕获目标器的基本过程如图5所示。首先形成对目标器的闭合,用时Δt,这个时候操作器手指和目标器并没有接触;然后操作器手指继续运动,完成对目标器的锁紧。当闭合用时 Δt为t1时,平移偏差为±a p,角度偏差为 ±αp。
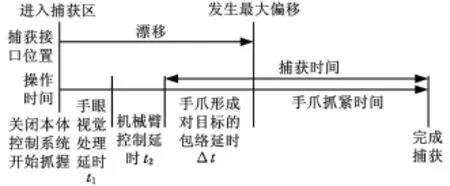
图5 操作时间和目标器位置关系
由图5可见,操作器手指较快地完成闭合,即缩短包络延时时间Δt,可以减小目标器在空间中的偏移,更多地压缩目标器可能的漂移空间以防止出现较大的姿态改变;同时,在捕获时间不变的情况下缩短包络时间就可以增加操作器手指锁紧时间。也就是说,操作器手指尽可能快地闭合,可以提高捕获成功率和可靠性。
因此,抓握时手爪的闭合角速度 ωc与锁紧角速度 ωl应满足 ωl≤ωc。
对于锁紧过程的轨迹规划,可采用常用的4-3-4规划法。操作器有下面三段轨迹:第一段为从初始点到提升点的轨迹,用四次多项式表示;第二段(或中间段)为从提升点到下放点的轨迹,用三次多项式表示;第三段为从下放点到终止点的轨迹,由四次多项式表示。

已知初始点、提升点、下放点、终止点的位置、速度 、加速度分别为,给定以下条件这里 τi t、τi f分别表示第 i点起始时间、期望终止时间。
此时,可得手爪从闭合状态运动到锁紧状态的过程中角位移和角速度变化曲线,如图6和图7所示。
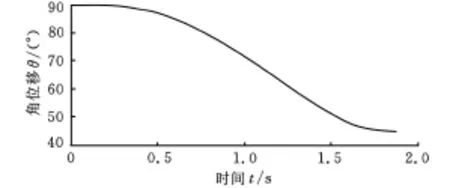
图6 角位移变化曲线

图7 角速度变化曲线
3 试验与分析
利用研制的测试平台对机器人末端操作器进行了试验分析和研究。根据上述分析结果,改变手指运行速度,可以实现不同的轨迹规划。
针对相同的目标器位姿采用不同的轨迹规划下,手爪和目标器会有不同的碰撞效果,即对基座有不同的作用力和力矩。在试验中,我们选取了不同的锁紧时间对力/力矩进行测试及分析,试验结果表明,当锁紧时间tl数值越小时,操作器受到的瞬时力/力矩值也越大,即在抓握过程中的碰撞力更大。因为锁紧时间越短,所需要的电机转速越高,手指对目标器的冲量越大。同时,更短的锁紧时间,缩短了碰撞到锁紧的时间,减小了目标器在残余速度、角速度影响下的可达空间,在一定程度上改善了最终锁紧的效果。
4 结论
(1)研制的机器人末端操作器,可以用来协助机器人捕获漂浮目标,不仅能够拓展机器人的使用范围,而且具有较好的捕获性能。
(2)分析得到了目标器偏差和时间的关系,可以通过调整抓握策略和时间分配,减小目标器的位姿偏差。
(3)通过多次测试可知,合理的轨迹规划可以使得末端操作器具有更好的抓握性能。
[1] 张福海,付宜利,王树国.一种笛卡尔空间的自由漂浮空间机器人路径规划方法[J].机器人,2009,31(2):187-192.
[2] Hirzinger G.Robotics Component Verification on ISS[C]//Proceedings of i-SAIRAS 2005-the 8th International Symposium on Artificial Intelligence,Robotics and Automation in Space.European Space Agency,2005:57-67.
[3] Robert J.Autonomous Capture of a Free-Floating Object Using a Predictive Approach[D].Montreal,Quebec,Canada:M cGill University,2008.
[4] 史国振,孙汉旭,贾庆轩,等.空间机器人控制系统硬件仿真平台的研究[J].计算机工程与应用,2008,44(12):5-9.
[5] Su Jianbo,Xie Wenlong.Motion Planning and Coordination for Robot System Based on Represent Action Space[J].Transaction on Systems,Man,and Cybernetics,Part B:Cybernetics,2011,41(1):248-259.
[6] Green A,Sasiadek JZ.Intelligent Tracking Control of a Free-flying Flexible Space Robot Manipulator[C]//Collection of Technical Papers-AIAA Guidance,Navigation,and Control Conference.Hilton Head,South Carolina,2007:132-156.
猜你喜欢
小哥白尼(趣味科学)(2021年6期)2021-11-02
故事作文·高年级(2021年4期)2021-05-06
小哥白尼(神奇星球)(2021年11期)2021-03-08
铁道标准设计(2020年4期)2020-04-26
装备制造技术(2019年6期)2019-08-15
电子制作(2018年24期)2019-01-03
荣誉杂志(2017年7期)2017-08-23
液压与气动(2015年2期)2015-04-16
装备环境工程(2015年5期)2015-02-28
科学种养(2014年4期)2014-06-09