捷联惯导系统传递对准中的时间补偿算法
2011-05-28 02:26徐翔
水下无人系统学报 2011年4期
徐 翔
捷联惯导系统传递对准中的时间补偿算法
徐 翔
(海军驻昆明地区军事代表办事处, 云南 昆明, 650031)
为了减小或消除时间延迟的影响, 提高系统动基座传递对准精度, 提出了一种捷联惯导系统传递对准过程中对主、子惯导间信息传输时间延迟的补偿算法。该算法利用子惯导导航解算过程中的相关数据和延迟时间, 对传递信息中因时间延迟产生的误差进行补偿修正, 并用修正后的主惯导信息进行动基座传递对准。车载试验结果证明, 该方法可有效提高系统传递对准精度, 减小传递对准时间, 补偿算法有效可行。
捷联惯导系统; 传递对准; 时间延迟; 补偿算法
0 引言
捷联惯导系统传递对准是指利用精度较高的主惯导系统输出的速度、姿态等信息, 实现子惯导系统的初始对准工作, 与自主对准相比, 传递对准对载体在对准期间的机动限制较小, 有利于实现动基座对准, 被认为是目前最好的对准方法之一[1]。
在动基座条件下, 主惯导系统信息的传输延迟对传递对准有着明显的影响[2], 本文以速度匹配传递对准为例, 分析了时间延迟对传递对准的影响机理, 提出了一种在时间延迟已知条件下的误差补偿算法, 并通过车载试验进行了验证。
1 传递对准中的时间延迟
所谓时间延迟是指, 主惯导输出的导航信息不能立即传递到子惯导系统, 而是在延迟了一段时间后才到达子惯导系统。产生时间延迟的主要原因包括主、子惯导间的通信时间和信息传递通道上各信息中转滞留[3]。在实际情况中, 时间延迟包括固定延迟和随机延迟, 延迟时间通常是不固定且未知的。
传递对准过程是选择若干观测量, 通过主、子惯导一段时间内输出信息的匹配观测, 估计子惯导的数学平台误差并予以修正, 使主、子惯导输出信息误差的方法达到最小。
以速度匹配传递对准为例, 所选观测量为载体运动的东向速度和北向速度, 当主、子惯导输出的速度信息误差的方差达到最小时, 子惯导系统完成对准。其表达式为

当主、子惯导间存在延迟时, 式(1)变换为
不难看出, 当载体处于静基座或匀速直线运动条件下时, 系统的对准过程不受影响, 但当系统处于机动条件下时, 将导致系统对准时间加长甚至导致产生一定的对准误差。
2 基于速度匹配传递对准的时间延迟补偿方案
通过以上分析不难看出, 时间延迟影响传递对准主要原因是子惯导用于匹配计算的主惯导信息并非当前时刻主惯导输出量[4], 因此, 补偿算法为在用于匹配计算的主惯导信息中叠加一个误差补偿量, 使补偿后的主惯导信息尽可能反映载体当前时刻载体的运动状态, 系统量测方程为

式中:为子惯导系统的导航解算周期;为系统输出在导航坐标系内的运动加速度, 可直接从子惯导导航解算过程中获得。
由于本算法建立在延迟时间已知的条件下, 故, 准确测量主、子惯导间的信息传输延迟是本算法成立的前提条件, 具体实现方法如下。
使用时间同步技术实现主、子惯导间的时钟对准, 同时在传递信息中加入时标信息, 记录该组信息的产生时刻。子惯导系统在读取信息后, 只需要将其中的时标与本地时钟对比, 即可获得信息传输过程中的延迟时间。
3 时间延迟补偿算法车载验证试验
根据以上补偿算法进行车载验证试验, 试验中通过人为在主惯导信息传输过程中加入100 ms时间延迟来模拟真实的环境, 采用高精度INS(inertial navigation system)+GPS(global positioning system)组合导航系统模拟主惯导, 考察主、子惯导间的姿态误差和速度误差。
将有关试验数据绘制成图, 其中, 未进行时间延迟补偿时, 主、子惯导间的姿态误差和速度误差分别如图1(a)和图2(a)所示, 在进行了时间补偿后, 主、子惯导间的姿态误差和速度误差分别如图1(b)和图2(b)所示。图1中, 实线代表俯仰角误差, 虚线代表滚动角误差。图2中, 实线代表北向速度误差, 虚线代表东向速度误差。
通过对误差图和车载验证试验结果的分析可知, 未进行时间延迟补偿前, 系统的姿态和速度误差均存在较大的噪声, 误差较大且不稳定。在进行时间延迟补偿后, 系统对准精度及稳定性明显提高。
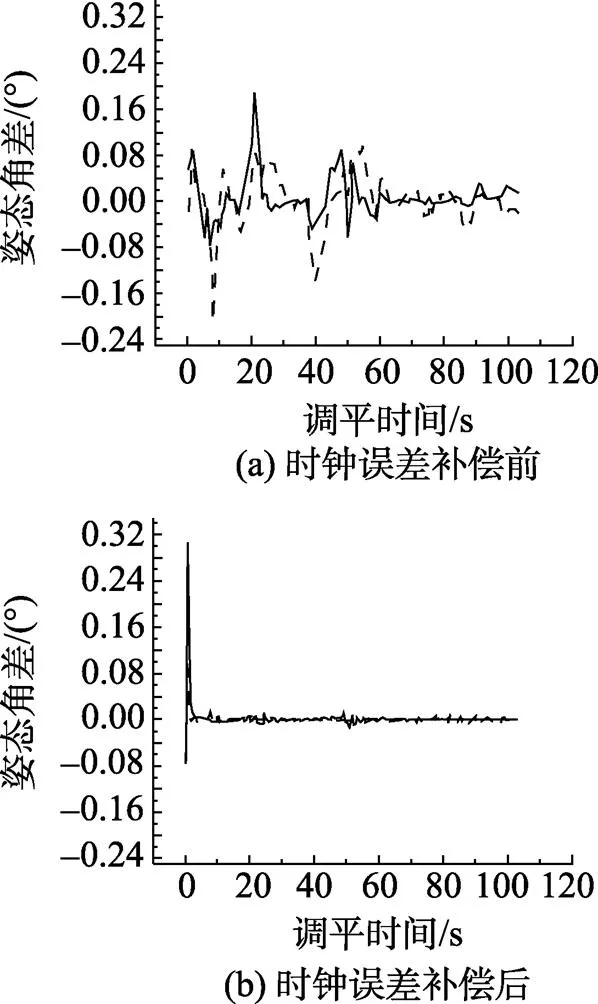
图1 时间延迟补偿前后姿态误差图
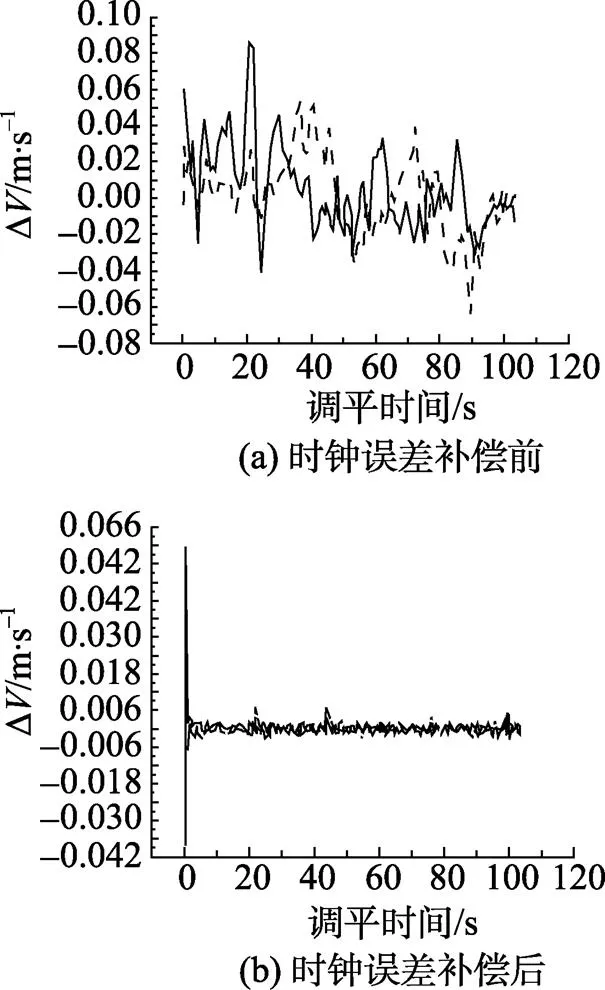
图2 时间延迟补偿前后速度误差图
4 结束语
本文提供的算法为已知固定时间延迟的补偿算法, 在实际系统中, 时间延迟包括固定延迟和随机延迟, 即使是固定延迟, 也不容易精确测量。因此, 采用统一时钟技术并在传输信息中加入时间标签是最优的解决方案。
[1] 袁信, 俞济祥, 陈哲. 导航系统[M]. 北京: 航空工业出版社,1993.
[2] 游文虎, 姜复兴. INS/GPS 组合导航系统的数据同步技术研究[J] . 中国惯性技术学报, 2003, 11(4): 21-23.
You Wen-hu, Jiang Fu-xing. Data Synchronization Tech- nology of INS/GPS Integrated Navigation System[J]. Journal of Chinese Inertial Technology, 2003, 11(4): 21- 23.
[3] 肖进丽, 潘正风, 黄声享. GPS/INS组合导航系统时间同步方法研究[J] . 测绘通报, 2007(4): 27-29.
Xiao Jin-li, Pan Zheng-feng, Huang Sheng-xiang. Time Sy- nchronization Method of GPS/INS Integrated Navigation System[J]. Bulletin of Surveying of and Mapping, 2007(4): 27-29.
[4] 陈兵舫, 张育林, 赵华丽. 组合导航系统时间不同步对 INS初始对准的影响[J]. 中国空间科学技术, 2001(5): 13- 20.
Chen Bing-fang, Zhang Yu-lin, Zhao Hua-li. Effect of Time Asynchronous of Integrated Navigation System on Initial Alignment of Inertial Navigation System[J]. Chi- nese Space Science and Technology, 2001, (5): 13-20.
A Time Delay Compensation Algorithm for Transfer Alignment in Strapdown Inertial Navigation System
XU Xiang
(Military Representative Office, Stationed in Kunming, Kunming 650031, China )
To reduce the influence of time delay, and enhance the precision of transfer alignment for movable base, a compensation algorithm for information transmission time delay between master and slave strapdown inertial navigation systems (SINS) in transfer alignment is proposed. The algorithm uses the delay-time and the relevant data in solving process of the slave inertial navigation system to compensate the errors caused by time delay in information transmission, and performs transfer alignment of the movable base according to the corrected information of master inertial navigation system. Test results show that the proposed algorithm can improve the transfer alignment accuracy and reduce transfer alignment time.
strapdown inertial navigation system(SINS); transfer alignment; time delay; compensation algorithm
TJ630.33;P227.9
A
1673-1948(2011)04-0282-03
2011-06-07;
2011-07-08.
徐 翔(1978-), 男, 工程师, 主要研究方向为鱼雷反潜.
(责任编辑: 杨力军)
猜你喜欢
舰船科学技术(2022年10期)2022-06-17
上海理工大学学报(2021年3期)2021-07-20
专用汽车(2018年10期)2018-11-02
当代陕西(2018年12期)2018-08-04
北京航空航天大学学报(2018年1期)2018-04-20
人生十六七(2016年14期)2016-12-01
电子制作(2016年21期)2016-05-17
探测与控制学报(2015年4期)2015-12-15
弹箭与制导学报(2015年1期)2015-03-11
计算技术与自动化(2014年1期)2014-12-12