鱼雷自导声对接式目标模拟器设计与实现
2011-05-28 02:19杨占龙王新宏
水下无人系统学报 2011年4期
杨占龙, 陈 航, 王新宏, 戚 茜
鱼雷自导声对接式目标模拟器设计与实现
杨占龙, 陈 航, 王新宏, 戚 茜
(西北工业大学 航海学院, 陕西 西安, 710072)
现有的大多数水下目标模拟器(包括针对声纳和鱼雷自导)在设计时均未考虑信号接收端的换能器基阵特性, 为能在陆上试验室条件下全面测试鱼雷自导系统性能, 设计并实现了一种基于声对接方式的鱼雷自导目标模拟器, 介绍了声对接式目标模拟器的组成及其相应功能, 设计了阵元信号模拟器与声对接装置, 完成了并行处理系统的硬件开发、声对接基阵与换能器阵元设计及声匹配材料的选取。通过对研制的声对接式目标模拟器的性能测试, 并利用自导头通过声耦合对生成的阵元信号进行检验, 结果证实了以声对接方式设计并实现的目标模拟器的可行性和有效性。该目标模拟器克服了对声学部件建模不精确所带来的影响, 减少了鱼雷自导系统水下试验的次数, 具有很好的实用价值。
鱼雷自导系统; 目标模拟器; 声对接阵; 数字信号处理器; 并行处理
0 引言
鱼雷自导目标模拟器是在试验室环境下对鱼雷自导系统进行研究与测试所必需的关键设备, 它从仿真角度通过对鱼雷水下工作环境与目标声学特性进行模拟, 为鱼雷自导系统提供自导基阵阵元接收信号, 使得在试验室中达到自导系统研究与测试的目的。目标模拟器的开发研究首先需要进行的重要工作是对水声环境、目标声学特性、换能器基阵特性建立数学模型, 所建立的数学模型是否准确地反映鱼雷工作的物理环境, 是决定着目标模拟器有效性的关键, 也直接影响到鱼雷自导系统的研究与性能测试结果。
现有的大部分水下目标环境模拟器[1-4]仅通过对水声环境与目标声特性建立数学/仿真模型来模拟海洋环境与目标信号, 避开换能器基阵, 其结果无法体现声学部件特性, 从而影响鱼雷自导/声纳系统研究或测试结果的置信度, 更无法检验包括声学基阵在内的鱼雷自导头/声纳全系统。
鉴于此, 本文针对鱼雷自导目标, 研究基于声对接方式的鱼雷自导目标模拟器, 将与鱼雷自导换能器基阵对应的声对接基阵物理设备引入目标模拟器中, 构成含声对接阵的目标/环境模拟半实物系统, 通过声对接基阵将数字设备产生的基阵阵元接收信号在陆上试验室环境中以声耦合方式为鱼雷自导头提供物理激励, 模拟鱼雷自导的水下试验平台环境, 具有很好的应用价值。
1 鱼雷自导声对接式目标模拟器
鱼雷自导声对接式目标模拟器主要由阵元信号模拟器与声对接装置两大部分组成, 具备自导基阵阵元接收信号的模拟与声信号的对接两大功能, 其中声对接装置包括声对接基阵与声匹配材料。声对接式目标模拟器的组成以及与鱼雷自导头对接示意, 见图1。

图1 声对接式目标模拟器组成框图
2 阵元信号模拟器设计
对于鱼雷自导声对接式目标模拟器, 其大数据量与大运算量的特点决定了在设计时首先要保证它是一个实时系统, 能够实时产生多路阵元域信号, 以实时地给鱼雷自导头提供物理激励。因此, 阵元信号模拟器采用具有多个高速数字信号处理器(digital signal processor, DSP)的并行处理系统作为阵元信号实时产生的硬件平台。
图2是阵元信号模拟器并行处理系统的硬件结构图。工控机的主控板是并行处理系统的管理中心, 完成系统的任务动态调度与控制。数字信号处理板与D/A板是系统的信号处理中心, 实现阵元信号实时生成的任务。
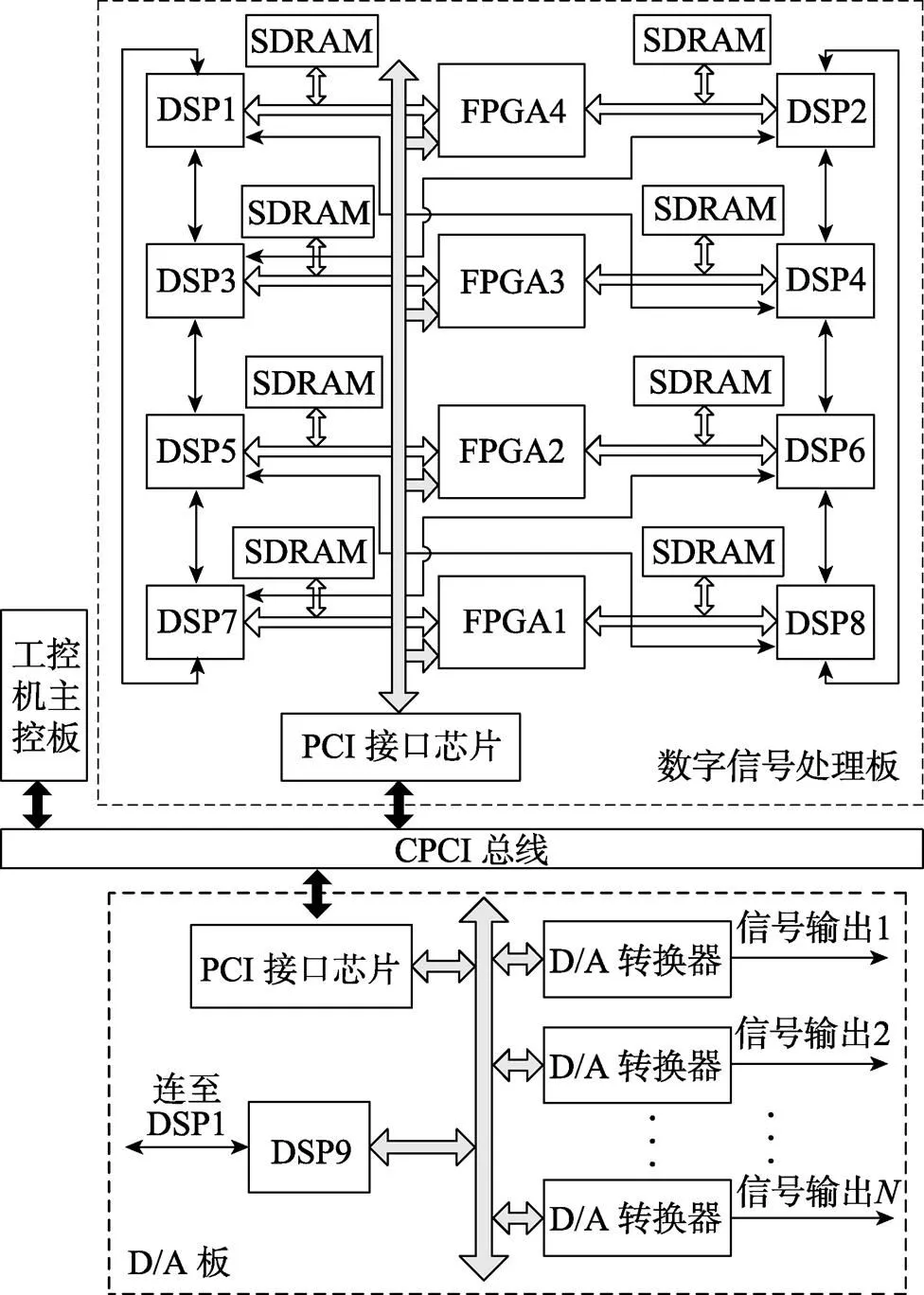
图2 阵元信号模拟器硬件结构图
数字信号处理板基于紧凑型外设组件互连(compact peripheral component interconnect, CPCI)总线的体系架构, 采用分布式耦合结构, 8片ADSP-TS201S处理器间通过链路口构成阵列式互连结构。每片DSP外接1片256 MB的同步动态随机存储器(synchronous dynamic random access memory, SDRAM), 可用于大容量数据的高速存储。主机与DSP之间的通信通过66 MHz/64bit CPCI总线, 经由外设组件互连(peripheral component interconnect, PCI)接口芯片协调完成。DSP间通过链路口进行数据交互。图中FPGA(field programmable gate array)即现场可编程门阵列。
D/A板采用PCI接口方式, 可实现多路通道的同步输出。板上TS201S处理器与主控板1号DSP相连, 通过链路口进行数据通信, 负责8片D/A转换器的初始化与读写操作, 控制D/A转换器输出模拟信号。
3 声对接装置设计
声对接装置的主要功能是将阵元信号模拟器产生的阵元域模拟电信号通过声对接装置中的对接基阵转换为声信号, 以声耦合方式为鱼雷自导头基阵阵元提供一对一的物理激励, 是声对接式目标模拟器实现水下工作环境的关键部件。
3.1 声对接基阵
由于声对接基阵是为自导头基阵提供一对一的物理激励, 且自导头基阵已定型, 因此在设计与其配套的声对接基阵时首先按照自导头基阵的阵元排列方式布阵并硫化定型, 对接阵阵元以点对点的方式对自导头基阵注入声信号, 且与自导头基阵阵元一一对应地形成各自独立的声信道, 产生垂直入射到自导头基阵的平面波信号。
为了保证声对接基阵与自导头基阵可靠对接并正确耦合, 将对接基阵与自导头基阵通过支撑架固定好, 顶紧装置将对接基阵加压紧固。图3给出声对接装置的装配示意图。为了确保声耦合处于最佳状态, 除了声对接基阵辐射面与自导头基阵接收面之间有一定的均匀压力分布外, 声对接基阵在硫化时需对辐射表面线型进行控制, 采用二次硫化的工艺技术确保硫化后的基阵表面光滑平整[5], 从而使得对接阵辐射面与自导头接收面对接时均匀接触, 有利于充分耦合。
为了减小阵元间交叉耦合引起的自导头基阵接收信号失真等影响, 研制对接基阵时首先保证与自导头基阵完全共形, 对接基阵换能器与自导头基阵对应换能器点对点准确定位, 严格控制两者的对接位置偏差; 其次对接换能器采用小尺寸辐射面换能器[6], 最大程度上减小对接阵阵元与自导头基阵阵元间的交叉耦合与相互作用。
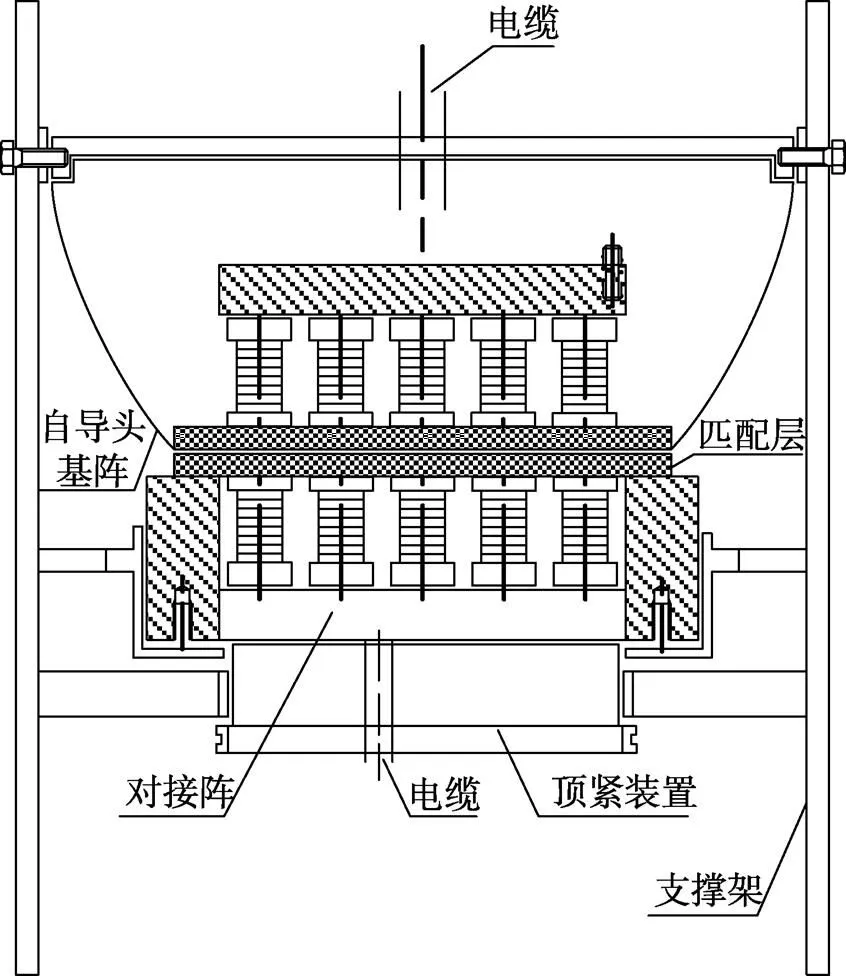
图3 声对接装置装配示意图
3.2 声对接换能器阵元
声对接换能器采用与自导头基阵换能器同类型的纵振复合棒换能器, 材料选用PTZ-4压电陶瓷, 发射带宽满足针对鱼雷自导目标信号的频带要求, 涵盖自导头工作频段, 且在带宽内具有平坦的发射响应。
3.3 声匹配材料
对于声匹配材料的选择, 首先考虑其声阻抗率, 为了在空气环境下模拟海水环境, 声匹配材料的声阻抗率要与海水的声阻抗率相一致。其次, 要考虑匹配材料的厚度, 适宜的厚度既能保证正确的声耦合, 还能在阵元间对接加压时起到缓冲作用。
3.3.1 声匹配材料的声阻抗
通常, 水声换能器基阵的透声膜选用与海水特性阻抗非常接近的聚氨酯橡胶[5], 因此在选择声匹配材料时应考虑与透声膜特性阻抗相近的透声橡胶, 达到介质间的阻抗匹配, 同时要求匹配材料密度均匀, 无杂质。
3.3.2 声匹配材料的厚度

即

同时, 匹配层厚度还应满足
4 系统测试与结果
4.1 声对接阵测试
在陆上环境中对研制出的声对接阵进行了性能测试。将声对接阵与自导头基阵对接加压固定好后, 在声对接阵阵元端加峰峰值为10 V的发射信号, 测量自导头基阵对应位置阵元通过声耦合得到的接收响应, 测量的部分结果如表1所示。
表1 自导头基阵部分阵元的接收响应
Table 1 Receiving responses of torpedo homer array elements
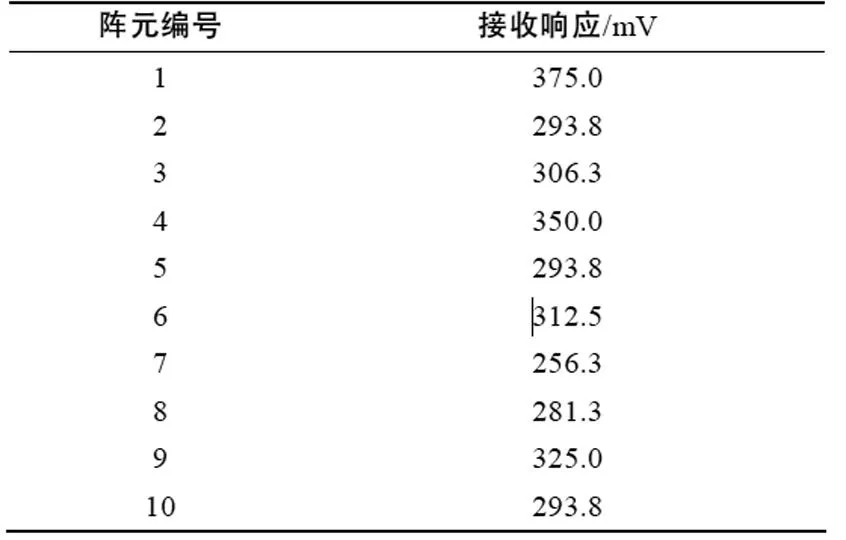
由表1可以看出, 由对接阵通过声耦合方式得到的自导头基阵阵元端接收响应具有较好的一致性, 能够满足实际系统的对接需求。
4.2 阵元域信号产生与检验
利用自导头对声对接式目标模拟器产生的阵元域信号进行了静态开环检验。图4为主动自导工作方式下声对接式目标模拟器产生的阵元信号波形图。由于声对接阵的阵元数较多且数据量大, 考虑到系统实时性, 在阵元信号模拟器上显示阵元信号波形时仅显示前4路阵元信号波形, 并对阵元信号数据按照一定比例进行抽取显示。
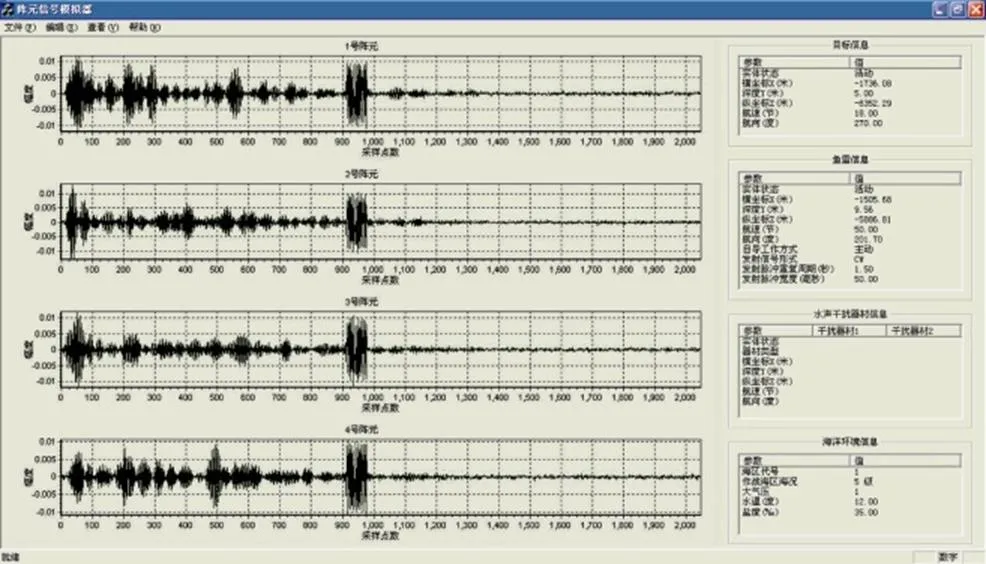
图4 声对接式目标模拟器阵元信号波形图
由图4可以看出, 阵元信号波形中首先到达的是混响信号, 紧接着是目标回波信号。根据目标与鱼雷的位置坐标: 目标(-1 736.08 m,-5 m,-6 352.29 m), 鱼雷(-1 505.68 m,-9.56 m,-5 886.81 m),解算出的目标相对于鱼雷的水平方位角为4.63°, 垂直方位角为0.50°, 雷目距离为519.4 m。根据目标航速航向与鱼雷航速航向, 解算出的目标与鱼雷的相对径向速度为43.34 kn。鱼雷自导头对由对接阵耦合到基阵阵元信号进行自导信号处理, 得到自导估计出的目标参数为: 水平方位角为2.24°, 垂直方位角为-0.29°, 雷目距离为533.76 m, 相对速度为37.15 kn。结合自导估计结果, 并考虑到自导估计的误差性, 可以得出,声对接式目标模拟器产生的阵元信号能够正确反映目标信息, 验证了以声耦合方式为自导头基阵提供激励的可行性与有效性。
5 结束语
本文设计并实现的声对接式目标模拟器克服了对换能器基阵声学部件进行建模的不精确所带来的影响, 弥补了传统目标模拟器无法对鱼雷自导头基阵进行测试的不足, 在陆上试验室条件下即可完成自导性能研究和测试工作, 提高仿真精确度的同时大大节省了试验费用。
通过添加网络接口单元, 声对接式目标模拟器可作为单独的仿真成员加入到其他水声仿真系统中, 构成水声环境半实物仿真系统, 而且单独提取阵元信号模拟器部件即可完成半实物仿真到数字仿真的转换, 具有很好的可移植性。
[1] 李蕾, 吴永清, 蔡惠智. 声纳基阵信号模拟器实时软件的开发[J]. 声学技术, 2004, 23(3): 146-149.
Li Lei, Wu Yong-qing, Cai Hui-zhi. Real-time Software Development for Sonar Array Signal Simulator[J]. Tech- nical Acoustics, 2004, 23(3): 146-149.
[2] 胡青. 基于DSP的声呐基阵信号模拟器设计[J].声学与电子工程. 2008(4):8-11.
[3] 姜建平, 姜水生, 邓伟. 基于TMS320F2812的通用鱼雷信号模拟器的软件设计[J]. 南昌大学学报(工科版), 2009, 31(3): 248-251. Jiang Jian-ping, Jiang Shui-sheng, Deng Wei. Software Design of Generic Torpedo Signal Simulator Based on TMS320F2812[J]. Journal of Nanchang University (Eng- ineering & Technology), 2009, 31(3): 248-251.
[4] 高天德, 李志舜. 声呐目标回波的理论和模拟器研究[J]. 西北工业大学学报, 2000, 18(2): 245-249. Gao Tian-de, Li Zhi-shun. On the Emulation of Under- water Acoustic Echo[J]. Journal of Northwestern Polyte- chinal Universtiy, 2000, 18(2): 245-249.
[5] 刘军凯, 郭涛, 龚源. 鱼雷声学基阵硫化新技术探讨[J]. 鱼雷技术, 2009, 17(2): 37-39. Liu Jun-kai, Guo Tao, Gong Yuan. An Improved Vulca- nization Technology for Torpedo Acoustic Array[J]. Tor- pedo Technology, 2009, 17(2): 37-39.
[6] 吴笛霄, 马奇伟. 声对接阵阵元参数控制[J]. 海军工程大学学报, 2003, 15(5): 83-86. Wu Di-xiao, Ma Qi-wei. Elementary Parameter Control of Acoustic Coupling Array[J]. Journal of Naval Univer- sity of Engineering, 2003, 15(5): 83-86.
[7] 杜功焕, 朱哲民, 龚秀芬. 声学基础[M]. 南京: 南京大学出版社. 2001.
Design and Implementation of Target Simulator with Acoustic Coupling for Torpedo Homing System
YANG Zhan-long, CHEN Hang, WANG Xin-hong, QI Qian
(College of Marine Engineering, Northwestern Polytechnical University, Xi¢an 710072, China)
Mostexisting underwater target simulators for sonar and torpedo homing system were designed without considering the characteristics of transducer array for signal receiving. To test comprehensively the performance of torpedo homing system in laboratory, we designed and implemented a target simulator with acoustic coupling, including the array element signal simulator and acoustic coupling device. This paper introduces the architecture and functions of the target simulator with acoustic coupling, the hardware platform development of a multi-DSP parallel processing system, the designs of acoustic coupling array and transducer array elements, and the selection of acoustic coupling material. The performance test for the developed target simulator was conducted and the coupled element signals were tested with the existing torpedo homing system. The results verify the feasibility and effectiveness of the target simulator with acoustic coupling. This target simulator can overcome the influence of inexactly modelling transducer array, and reduce the number of underwater tests for torpedo homing system.
torpedo homing system; target simulator; acoustic coupling array; digital signal processor (DSP); parallel processing
TJ630.34; TP391.9
A
1673-1948(2011)04-0263-05
2011-01-16;
2011-03-07.
杨占龙(1976-), 男, 博士后, 研究方向为鱼雷自导信号与信息处理.
(责任编辑: 杨力军)
猜你喜欢
智能计算机与应用(2021年5期)2021-10-05
水下无人系统学报(2018年5期)2018-11-09
科学与财富(2018年13期)2018-06-13
电子制作(2018年2期)2018-04-18
舰船电子工程(2017年11期)2017-12-25
水下无人系统学报(2017年5期)2017-11-22
军事运筹与系统工程(2017年1期)2017-07-31
弹道学报(2016年4期)2016-12-14
水下无人系统学报(2016年3期)2016-10-13
雷达与对抗(2015年3期)2015-12-09