海流干扰作用下欠驱动AUV航路点跟踪控制
2011-05-28 02:26夏梁盛严卫生
水下无人系统学报 2011年4期
夏梁盛, 严卫生,2
海流干扰作用下欠驱动AUV航路点跟踪控制
夏梁盛1, 严卫生1,2
(1. 西北工业大学 航海学院, 陕西 西安, 710072; 2. 水下信息与控制重点实验室, 陕西 西安, 710072)
针对海流干扰作用下欠驱动自主水下航行器(AUV)的航路点跟踪控制问题, 建立了水平面内欠驱动AUV三自由度数学模型, 以相对于水流的前向速度和角速度为虚拟输入, 设计了航路点跟踪控制的运动学控制律, 然后基于反演方法设计了动力学控制律, 得到控制力和控制力矩。在航路点跟踪控制仿真研究中, 指定AUV依次通过惯性坐标系内一系列航路点, 仿真结果表明, 所设计的控制律有效, 欠驱动AUV能较好的完成航路点跟踪任务, 并到达最终目标点。
欠驱动自主水下航行器; 海流干扰; 航路点跟踪; 反演法
0 引言
自主水下航行器(Autonomous Underwater Vehicle, AUV)作为海洋开发的一项重要工具, 可以出色的完成多种民用与军事任务, 近年来取得了长足的发展[1]。AUV的航路点跟踪控制作为AUV研究中的一个关键问题, 引起了人们的广泛关注。所谓航路点跟踪是指AUV出发后, 通过控制输入作用使其向航路点运动, 当与之距离小于某个阈值时, 认为到达航路点并且开始向下一个航路点运动, 直至完成所有航路点运动。

实际应用中, AUV任务环境复杂, 设计航路点跟踪控制律时若忽略海流对AUV的干扰作用, 可能会导致AUV在最终目标点附近持续震荡, 甚至脱离最终目标点。为了克服海流对AUV的干扰, 本文采用李雅普诺夫方法和反演技术设计了海流干扰下欠驱动AUV的运动学和动力学控制律[7,8], 使其依次通过惯性系内给定的一系列航路点, 并收敛到最终目标点。
1 AUV水平面数学模型
AUV运动学方程

AUV动力学方程



2 问题描述
急性肾衰伤患者分级:患者的急性肾衰伤分级根据全球肾病预后组织制定的急性肾衰伤进行判断,主要分为三期:急性肾衰伤Ⅰ期:血清肌酐值增加超过26.5 μmol/L,或者增加基线值在1.5~1.9倍;急性肾衰伤Ⅱ期:血清肌酐值增加基线值在2.0~2.9倍;急性肾衰伤Ⅲ期:血清肌酐值增加基线值在3倍以上。

图1 AUV数学模型


3 航路点跟踪控制律设计
3.1 运动学控制律设计
给出控制律


证明: 构造李雅普诺夫函数



3.2 动力学控制律设计


引入如下误差变量

构造李雅普诺夫函数





4 航路点跟踪仿真



图2 AUV航路点跟踪航迹图
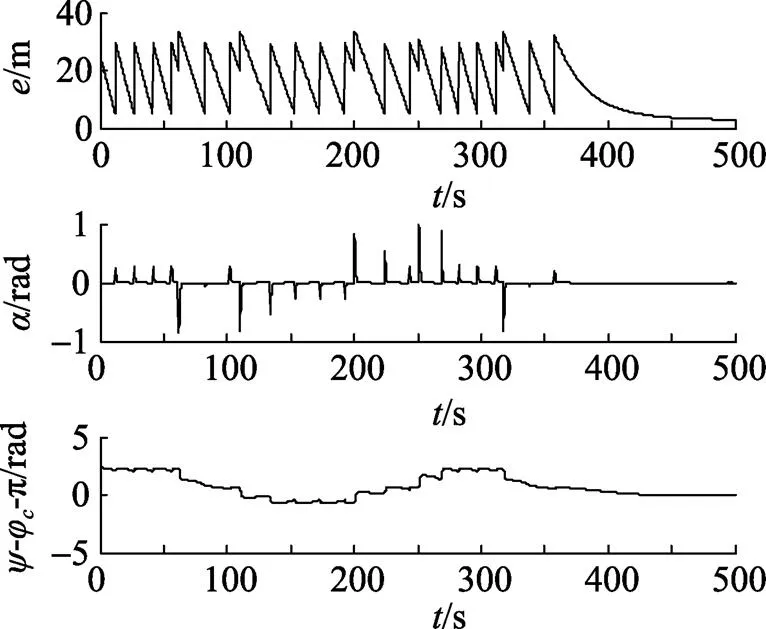
图3 航路点跟踪误差变化曲线
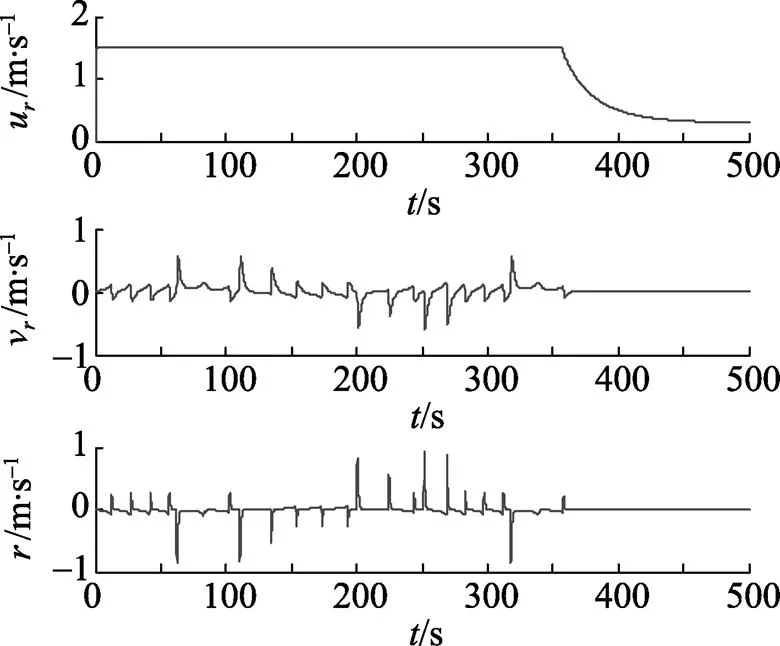
图4 AUV速度变化曲线

图5 AUV纵向推力和偏航力矩变化曲线
5 结束语
AUV在实际航行中, 若忽略海流对它的影响, 将会导致严重后果, 本文针对海流干扰作用下欠驱动AUV的航路点跟踪控制问题, 建立了水平面内AUV三自由度运动学和动力学方程, 然后利用Lyapunov法和反演技术分别设计了运动学和动力学控制律。为了验证控制律的有效性, 为AUV指定一系列航路点, 进行仿真分析, 结果表明, 所设计的控制律有效, 欠驱动AUV能有效克服海流的干扰, 较好的完成航路点跟踪任务。
[1] 徐德民, 李俊, 严卫生, 等. 自主水下航行器(AUV)的发展与关键技术[M]//中国科学技术前沿. 北京: 高等教育出版社, 2004.
[2] Breivik M. Nonlinear Maneuvering Control of Under- actuated Ships[D]. Trondhei:Norwegian University of Science Technology, 2003.
[3] Breivik M, Fossen T I. Path Following of Straight Lines and Circles for Marine Surface Vessels[C]//Proceedings of the 6th IFAC CAMS, 2004: 65-70.
[4] Børhaug E, Kristin Y. Pettersen. Adaptive Way-point Tr- acking Control for Underactuated Autonomous Vehicles [C]//Proceedings of the 44th IEEE Conference on Deci- sion and Control, and the European Control Conference, 2005: 4028-4034.
[5] Børhaug E. Cross-Track Maneuvering and Way-Point Tracking Control of Underactuated AUVs in Particular and Mechanical Systems in General[D]. Trondhei: Nor- wegian University of Science Technology, 2005.
[6] Pettersen K Y, Lefeber E. Way-point Tracking Control of Ships[C]//Proceedings of 40th IEEE Conference on De- cision and Control, 2001.
[7] Jiang Z P, Nijmeijer H. Tracking Control of Mobile Robots: A Case Study in Backstepping[J]. Automatica, 1997, 33(7): 1393-1399.
[8] Jiang Z P, Nijmeijer H. A Recursive Technique for Tra- cking Control of Nonholonomic Systems in Chained Form[J]. IEEE Transactions on Automatic Control, 1999, 44(2): 265-279.
Way-Point Tracking Control of an Underactuated AUV in the Presence of Ocean Current Disturbance
XIA Liang-sheng, YAN Wei-sheng
(1. College of Marine Engineering, Northwestern Polytechnical University, Xi′an 710072, China; 2. Science and Technology on Underwater Information and Control Laboratory, Xi′an 710072, China)
This paper addresses the problem ofway-point tracking control of an underactuated autonomous underwater vehicle (AUV) in the presence of oceancurrent disturbance. Kinematics and dynamics models for the AUV with three degrees of freedom in horizontal plane are established. A kinematic controller is designed with the dummy inputs of forward speed and angular velocity relative to the current. Then a dynamic controller is derived based on the Lyapunov theory and the backstepping techniques. Simulation results show that the underactuated AUV can effectively track the way-points in the inertial frame and reach the final destination with asymptotically converged tracking errors.
underactuated autonomous underwater vehicle(AUV); oceancurrent disturbance; way-point tracking; backstepping
TJ630.33; TP242.3
A
1673-1948(2011)04-0271-05
2011-04-06;
2011-04-28.
国家自然科学基金资助项目(60875071); 高等学校博士点基金资助项目(200806990008).
夏梁盛(1971-), 男, 在读博士, 研究方向为水下航行器控制技术研究.
(责任编辑: 杨力军)
猜你喜欢
舰船科学技术(2022年11期)2022-07-15
中国海洋大学学报(自然科学版)(2020年8期)2020-08-03
火力与指挥控制(2020年2期)2020-04-02
中国海洋大学学报(自然科学版)(2020年8期)2020-01-07
医学新知(2019年4期)2020-01-02
中西医结合心血管病杂志(电子版)(2018年35期)2019-01-05
家庭医药(2018年9期)2018-09-27
百科探秘·海底世界(2017年9期)2018-01-22
医学信息(2017年20期)2017-10-10
北京航空航天大学学报(2016年7期)2016-11-16