主动声自导方式下鱼雷航行自噪声测量技术探讨
2011-05-27 08:48陈春玉
水下无人系统学报 2011年2期
易 红, 陈春玉
主动声自导方式下鱼雷航行自噪声测量技术探讨
易 红, 陈春玉
(中国船舶重工集团公司第705研究所, 陕西 西安,710075)
由于混响因素的影响使得主动声自导方式下鱼雷对航行自噪声的获取十分困难, 使得准确测量鱼雷自噪声成为困扰鱼雷自导系统的难题之一。针对此, 文章提出一种主动声自导带着混响测量鱼雷航行自噪声的测量方法, 详细介绍了该方法的原理并进行了计算, 通过自噪声测量方法示例, 证明了其可行性。试验证明, 该方法灵活、机动, 既可以测量换能器单元所接收到的噪声, 也可以测量波束输出的束内噪声, 并可做到实时、实地、实雷测量, 降低了成本, 提高了效益, 为准确测量鱼雷航行自噪声提供了新的技术途径。
鱼雷; 主动声自导方式; 自噪声; 混响; 噪声测量
0 引言
鱼雷自导系统负责完成鱼雷目标的探测任务, 其性能与鱼雷自噪声密切相关。鱼雷自噪声通常是指鱼雷航行过程产生的对自身探测系统工作形成干扰的噪声[1]。而噪声测量分析是噪声级认定、机理分析、预报验证和控制研究的基础。
众所周知, 鱼雷自噪声与鱼雷的航速、航深、工作频率以及海况有关, 必须实时、实地测量, 才能准确获得该条次的实航噪声, 以便正确地评价自导系统的工作性能。
鱼雷自导工作方式通常主动/被动并存或交替存在, 传感器接收到的干扰信号包括航行噪声和混响, 混响因素的影响使得主动声自导方式下鱼雷对航行自噪声的获取十分困难。因此, 要准确测量鱼雷自噪声, 必须将自导方式设定为被动方式, 关闭主动自导, 以消除混响的影响。但是这样一来就使实航条次利用率下降, 测量的成本大大提高。
基于此,本文提出一种混响情况下鱼雷主动声自导对自噪声的测量方法, 该方法可以测量换能器单元所接收到的噪声, 也可以测量波束输出的束内噪声, 并结合鱼雷实航任务兼测自噪声, 做到实时、实地、实雷测量, 为准确测量鱼雷航行自噪声提供新的技术途径。
1 测量原理
1.1 时域内测量
在鱼雷航行的初始阶段, 雷目距离较远, 目标信号(包括目标噪声和回波)尚未接收到, 该阶段可以接收到自噪声和混响。自导系统在一个收听周期内, 接收到的混响会逐渐衰减, 而噪声却基本维持不变。如图1所示[2]。

图1 混响和噪声干扰级随时间的变化

1.2 频域内测量
频域内测量噪声是根据混响和噪声的频谱分布不同而实施的。现代数字化鱼雷自导系统都具有谱分析能力, 为频域内测量自噪声提供技术基础。鱼雷自噪声的频谱很宽, 虽然不是白噪声, 但带宽很大, 而混响带宽相对较小, 它取决于发射信号带宽、波束宽度及鱼雷和散射体的多普勒频移。区分混响谱和噪声谱是频域内测量鱼雷自噪声的基础工作。
1.2.1 混响频谱分析
混响频谱主要由以下3种因素构成。
鱼雷上常用自导发射信号有连续波(conti- nuous wave, CW)单频脉冲信号和线性调频(lin- ear frequency modulation, LFM) 信号2种[3], 有时会用双曲调频(hyperbolic frequency modulation, HFM)信号, 它的频谱宽度与LFM相似。
1) CW信号

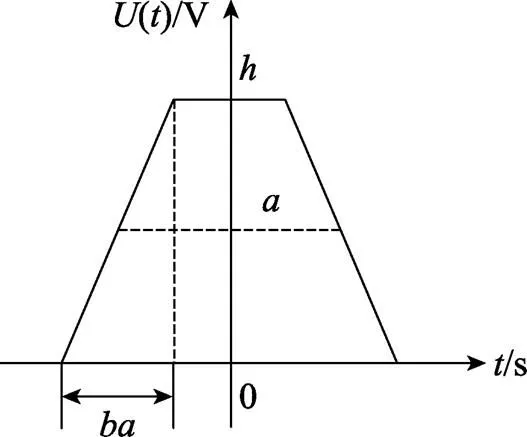
图2 梯形包络波形
按等效带宽定义(能量等效)

可算得梯形包络的频谱等效带宽为

2) LFM信号
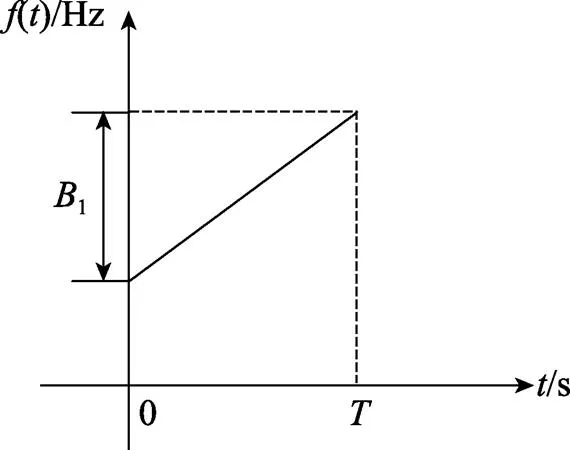
图3 线性调频信号的频率变化
3) HFM信号
假设鱼雷采用多波束系统和CW信号体制, 鱼雷速度方向与正前0°波束同轴, 那么任意波束内所接收的混响谱宽度为[2]


我查了一下地图,眉山在成都至乐山的交通要道上,距离成都只有78公里。其中的象耳山,就在眉山近郊。即便李白那个时代,也不至于连一根针都买不到。再说,一个农村老太,随便就能找到一根铁杵,说明这个地方的工业,还是比较发达。

一般散射体的运动速度小于1 kn, 故


1.2.2 回波信号谱分析


而


式中,v¢为雷速v在接收波束主轴方向的投影。
1.2.3 混响谱、噪声谱及信号谱的分布关系
根据以上计算, 可画出混响谱及噪声谱的分布关系, 如图4所示。

图4 混响谱、噪声谱的分布图


2 测量方法示例
2.1 测量系统结构

窄带自导系统测量自噪声组成见图5。
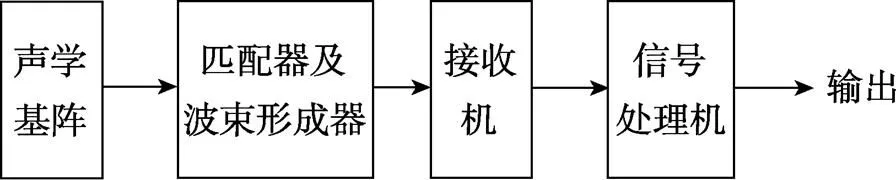
图5 窄带自导系统测量自噪声组成框图
2.2 计算噪声能量
从自导接收机通带内接收到的信号包括目标回波信号和干扰信号(混响和噪声), 这些信号经过离散傅立叶变换(discrete fourier transform, DFT)后, 进行窄带滤波, 最后选取纯噪声频段内的滤波器序号的输出作为所需要的测噪信号。
首先, 对接收机的输出信号进行希尔伯特变换(正交采样)形成实部和虚部信号, 然后分别平方、求和。采样数据可用块滑动窗来实现的, 块滑动窗间距为采样帧长度的1/4。加窗的DFT变换为

在1个收听周期内, 每一帧采样都可以得到1个噪声值。
最后, 计算该幅值折算到声学基阵端面的噪声均方根值。这些要根据具体测量装置的放大倍数、A/D转换精度以及计算幅值的具体公式加以综合考虑, 本文不再举例说明。
3 结束语
当鱼雷自导系统在收听周期内存在噪声限制时, 可利用噪声限这一时段测量鱼雷自噪声; 而对于数字化自导系统, 可以在频域内选取“纯”噪声频段测量鱼雷自噪声。
本文方法的优点在于: 1) 测量噪声时可以不改变鱼雷原有的工作模式, 原有的实航目的与测量自噪声同时并举, 互不影响, 无需关闭主动自导; 2) 每一个实航条次都可以测到不同工况下的航行自噪声, 做到实时、实地、实雷测量, 有利于分析鱼雷航行过程中自噪声对自导工作性能的影响; 3) 测量方法灵活、机动, 既可以测换能器单元所接收到的噪声, 也可以测量波束输出的束内噪声, 可将测量装置做成一块板, 通过接插件与鱼雷自导联接, 使用方便, 降低成本, 提高效益, 值得推广。
[1] 刘伯胜, 雷家煜. 水声学原理[M]. 哈尔滨: 哈尔滨船舶工程学院出版社, 1989.
[2] R.J. 尤立克. 水声原理[M]. 哈尔滨: 哈尔滨船舶工程学院出版社, 1990.
[3] 朱埜. 主动声呐检测信息原理[M]. 北京: 海洋出版社, 1990.
[4] 李志舜. 鱼雷自导信号与信息处理[M]. 西安: 西北工业大学出版社, 2004.
[5] 周德善. 鱼雷自导技术[M]. 北京: 国防工业出版社, 2009.
Measurement of Torpedo Running Self-Noise under Active Homing Mode
YI Hong, CHEN Chun-yu
(The 705 Research Institute, China Shipbuilding Indusitry Corporation, Xi′an 710075, China)
The effect of reverberation makes it very difficult for a torpedo to acquire its self-noise under active homing mode, therefore, a measurement method of torpedo self-noise with reverberation during torpedo running under active homing mode is presented in this paper. The principle of the method is introduced, and computations are conducted. Experimental result verifies its feasibility. Both the noise received by transducer elements and the noise in transmitted beams can be measured by this method with flexibility, real-time, and low cost. And the self-noise while performing the task of torpedo trial can also be measured by this method.
torpedo; active acoustic homing mode; self-noise; reverberation; noise measurement
TJ630.34; TB566
A
1673-1948(2011)02-0097-04
2010-11-25;
2010-12-24.
易 红(1964-), 女, 高工, 硕士, 主要研究方向为信号与信息处理、软件工程、信息对抗技术等.
(责任编辑: 杨力军)
猜你喜欢
智能计算机与应用(2021年5期)2021-10-05
成都信息工程大学学报(2021年1期)2021-07-22
科技传播(2019年21期)2019-11-12
舰船电子工程(2018年11期)2018-11-26
剧作家(2018年2期)2018-09-10
雷达学报(2018年3期)2018-07-18
北京航空航天大学学报(2017年3期)2017-11-23
军事运筹与系统工程(2017年1期)2017-07-31
水下无人系统学报(2016年3期)2016-10-13
火控雷达技术(2016年1期)2016-02-06