基于自适应模拟退火法的UUV艏部线型优化设计
2011-05-27 08:52张宇文王亚东袁绪龙
水下无人系统学报 2011年2期
裴 譞, 张宇文, 王亚东, 袁绪龙
基于自适应模拟退火法的UUV艏部线型优化设计
裴 譞, 张宇文, 王亚东, 袁绪龙
(西北工业大学 航海学院, 陕西 西安, 710072)
基于多目标空间的全局搜索理论, 将无人水下航行器(UUV)艏部丰满度, 流体动力与流噪声作为集成判定指标的综合一体化UUV艏部线型优化设计方法。建立了针对UUV艏部外形设计的一体化设计优化模型, 结合经典粘流理论、CFD算法实现了集成优化设计, 针对UUV外形优化设计要求, 提出了复杂外形参数化和设计变量的选取原则, 并对具体算例进行外形综合仿真优化设计。结果表明, 基于自适应模拟退火法能够有效实现对UUV期望目标的一体化优化设计, 在相互制约的多种目标函数所组成的目标域中获得最优解, 优化后UUV艏部流体动力和声学性能都有较大提高。
无人水下航行器(UUV); 多目标优化; 模拟退火法; 艏部线型; 集成优化设计
0 引言
无人水下航行器(unmanned undersea vehicle, UUV)是未来海洋开发和海洋军事领域应用不可缺少的工具[1], 具有极为广阔的发展前景。其中外形设计是总体综合优化设计的重要组成部分, 直接关系到UUV诸多战术技术性能, 也是研究艇体结构水动力外载荷和水动力噪声的依据和基础[2]。UUV艏部线型设计一般基于双参数方程[3], 其计算域理论上趋于无穷大, 且解空间具有明显的多峰性、离散性和耦合性, 目标函数存在很强的相互制约关系, 往往为解空间的强函数[4]。因此,对优化技术的全局搜索路径与决策方向提出了更高的要求。文献[5]和[6]指出, 现有的设计优化方法一般采用线性搜索的方法, 将阻力或噪声作为单一目标函数或将多目标函数离散线性化, 依照目标优先级作为单一函数优化, 以期获得设计参数之间的协调综合, 但是线型搜索法所获得的解空间区域的全局化程度较差, 其搜索方向往往趋向于局部化, 从而造成优化结果不理想。本文基于自适应模拟退火算法, 将UUV艏部的边界层转捩、阻力系数、丰满度与表面声功率级作为优化目标函数集进行一体化设计, 从而获得满足该目标凸空间域的UUV外形期望最优解。
1 优化目标模型
一般意义下, 多个目标之间往往是相互冲突的, 即在目标投影凸空间内, 不存在一个最优解使所有目标同时达到最优。一个目标性能的改善往往以其他一个或多个目标性能的降低为代价[6]。要在满足给定约束条件的前提下, 从设计变量的取值范围内搜索最佳设计点, 使多个设计目标决定的设计对象整体性能达到最优, 就要适当选择多目标的优化方法。
多目标优化问题可描述为[7]: 寻找一组设计变量=(1,2,…,x)T, 使max:[f()]=1, …,,约束条件为

式中:,,,分别为设计变量、目标函数、等式约束和不等式约束的个数;为优化问题的设计变量组成的向量。
模拟退火算法来源于固体退火原理, 将固体加温至充分高, 再让其徐徐冷却, 加温时, 固体内部粒子随温度升高变为无序状, 内能增大, 而冷却时粒子渐趋有序, 在每个温度都达到平衡态, 最后在常温时达到基态, 内能减为最小。假设在状态old时, 系统受到某种扰动而使其状态变为new, 对应的系统能量也从(old)变成(new), 系统由状态old变为状态new的接受概率为[8]。模拟退火算法与初始值无关, 算法求得的解与初始解状态(是算法迭代的起点)无关; 模拟退火算法具有渐近收敛性, 已在理论上被证明是一种以概率收敛于全局最优解的全局优化算法。
2 优化设计系统
UUV艏部线型设计准则的提出采用具体设计具体分析的方法, 从总体角度将阻力、转捩点、丰满度和噪声作为判定函数, 明确所设计的艏部线型的主要指标要求, 依据解决主要矛盾的原则提出。基于自适应模拟退火算法, 利用并行融合优化的设计思路, 建立了包括边界层转捩点、UUV艏部流体动力计算, UUV艏部表面声功率级计算与外形参数一体化融合优化设计的综合优化设计系统。UUV艏部线型优化设计的目标函数由3个目标参数与1个约束参数组成[9], 分别为艏部阻力系数C(目标参数)、艏部边界层转捩点x(目标参数)、艏部表面噪声源表面声功率级S(目标参数)和艏部线型丰满度(约束参数)。
系统流程构架示意如图1所示。
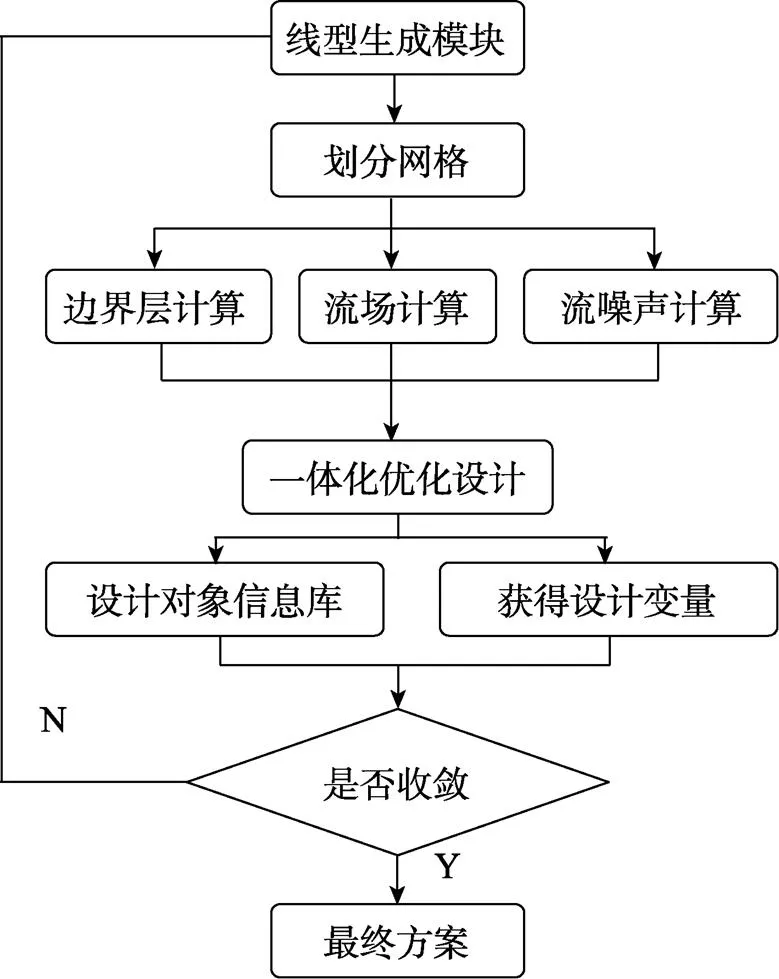
图1 优化流程框图
2.1 艏部线型设计模型

式中:k1为数学线型在=0处的曲率半径;k2为数学线型在=1处的曲率变化率。
其与物理线型对应量0和K1的关系为

函数()与K1()分别为0与k1的影响函数, 反映了0与k1对线型的影响程度[10]。
2.2 艏部边界层计算模型
UUV艏部表面轴对称边界层动量积分方程

式中:为卡门形状因子;为动量厚度;C为表面摩擦应力系数。
轴对称边界层的算法分为层流边界层和湍流边界层2种情况。层流边界层采用Holstein- Bohlen单参数法进行计算[11], 引入无量纲参数
将式(5)代入式(4), 可得

由式(7)可获得艏部边界层局部动量雷诺数关系表达式

式中:tr为当地动量厚度雷诺数, 其表达式

Re为层流转捩点处子午线弧长雷诺数,其表达式
在向下游推进计算中, 当tr首次大于或等于式(8)与右端项时, 表明该点已经转捩或者正好是转捩点。
2.3 艏部流噪声计算模型
声场的控制方程采用的FW-H 声学模型, 该模型是以Lighthill声类比理论为基础, 结合Kirchhof公式和FW-H公式, 其控制方程如下。
Lighthill密度波动方程[12]
K-FWH控制方程

式中:T为Lighthill应力张量, 其表达式

P为压应力张量, 其表达式
¢为远场声压, 其表达式
¢=-0(14)
()和()分别为狄拉克函数和海维赛德函数;为壁面函数;u和u分别为来流速度在x方向和垂直壁面方向的分量;v和v分别为运动表面响应的速度分量;0为远场声速;n为单位法向矢量由固体边界指向流场。
式(12)为N-S方程与连续性方程的重新组合, 可以化为具有2个面源项(单、偶极子)和1个体源项(四极子)的非齐次波动方程形式。由于FW-H方程基于连续性方程, 因此其分母在非线性区域仍然满足波动方程。
3 优化设计算例
本文的优化设计程序通过自适应模拟退火算法实现了低阻低噪一体化优化设计。这里选择总体部分参数参考SUBOFF数据, 生成艏部曲线段与部分中段圆柱段, 总长为3.5 m, 头部曲线段长度1.5 m, 直径为0.51 m, 速度为6 kn, 设计参数k1和k2的初始值分别为2。根据工程经验和结构设计方面的要求, 确定了优化的约束条件k1≤3,k2≤10, 以保证在圆弧段与直线段衔接处不会出现明显的凸起, 且保证一定的丰满度。优化方向是圆弧段与直线段的组合, 设计变量的搜索区间如图2所示。

图2 设计变量计算域
本文选取在定常层/湍流转换情况下的流体动力特性作为目标函数, 其中第1个目标函数取为在设计状态阻力系数C最小, 第2个目标函数为在设计状态转捩点位置x尽可能靠后布置, 第3个目标函数为在设计状态下表面噪声源白噪声表面声功率级S最低。约束条件为在满足外形约束的条件下, 具有一定程度的丰满度。因此, 该优化问题可以描述为, 在优化设计点寻找一组设计变量集(k1,k2)[13]。则UUV艏部一体化优化准则为

将第2个目标函数作最小化处理, 则3个目标函数的目标值可以获得[14]

其中,W为目标函数权重系数。
约束条件

由式(17)可知, 目标优化的搜索方向是沿着使减小的方向实现退火处理, 但由于单个目标值不同, 其对的贡献亦不同[15]。
根据式(17)可知, 权重系数决定了优化目标值的大小以及决策方向的转移, 可以根据不同要求采用适当的权重系数以改变解空间的搜索方向。本文采用3种权重比例工况如表1所示。
表1 不同权重系数对比计算工况

Table 1 Comparison of different weight coefficient calcu- lation conditions
从优化结果可看出, 随着k1的降低与k2的提高,C,x和S均较初始值有所改善。图3给出了优化工况1与优化前的UUV艏部外形线型与表面压力系数分布对比曲线。由图3可知, 优化后的表面压力系数最小值明显小于优化前, 且压力系数变化趋于平缓。图4给出了优化前后UUV表面的声功率级分布,由图4可知,优化后圆弧段声功率级峰值和均值均小于初始值, 且圆弧段与圆柱段衔接处初始值出现突变, 且峰值较大, 优化后衔接处声功率级变化非常平缓, 有效改善了UUV艏部噪声源声功率级。可见, 基于自适应退火模拟法对UUV艏部线型的优化是较为成功的, 能够同时兼顾对C,x和S等多目标的优化, 可作为UUV外形一体化设计的有效工具。

图3 UUV艏部线型及压力系数分布对比
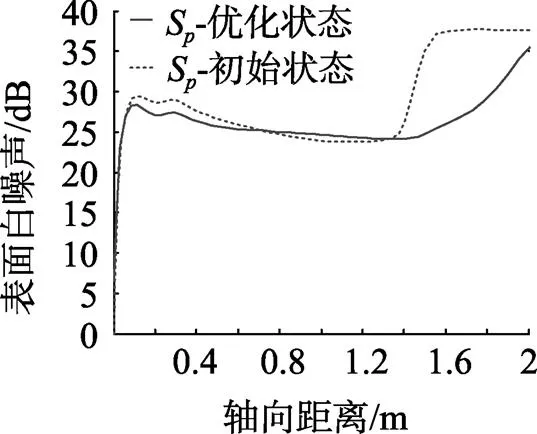
图4 UUV艏部表面噪声源对比
表2给出了优化结果和优化前初始外形的目标函数值。由表2可知, 不同权重系数所构成的凸多边形对优化结果具有较为明显的影响, 显著改变了参数的全域搜索方向与优化结果。突出相关权重系数时, 其对应的优化目标亦有相应的重点优化提高, 但同时带来的结果是导致其余相应对象优化指标一定程度的下降。但从优化结果分析, 各种工况目标参数指标均较原有线型有明显的提高。因此, 在对航行器艏部线型进行优化设计时, 应根据实际需要选取恰当的优化权重凸多边形, 从而实现艏部线型最终设计符合期望设计要求。

表2 参数优化对比
4 结束语
本文针对UUV线型变化对流体动力系数的优化问题, 提出了在初始设计过程中将多种目标函数作为一个整体进行综合设计的优化方法, 能够从一开始就对相互制约的各种流体动力参数进行系统化配置, 在目标函数中综合考虑了流体动力与声学两个双学科之间的耦合关系, 对鱼雷外形进行了优化设计, 从而得到最优设计。本文基于格兰维尔线型对UUV艏部线型进行了优化仿真计算, 从流体动力系数/流噪声特性优化前后仿真数据对比结果表明, 运用自适应模拟退火算法对UUV艏部线型进行优化是可行的, 在此基础上分析了不同优化权重凸多边形条件对优化结果的影响。
[1] 王晓武, 林志民, 崔立军. 无人潜水器及其动力系统技术发展现状及趋势分析[J]. 舰船科学技术, 2009, 31(8): 31- 34. Wang Xiao-wu, Lin Zhi-min, Chui Li-jun.Analysis of Tech- nology Status and Development Trend for Unmanned Under- water Vehicle and Its Propulsion System[J]. Ship Science and Technology, 2009, 31(8): 31-34.
[2] 张怀新, 潘雨村. CFD在潜艇外形方案比较中的应用[J]. 船舶力学, 2006, 10(4): 1-8. Zhang Huai-xin, Pan Yu-cun.Application CFD to Compare Submarine Hull Forms[J].Journal of Ship Mechanics, 2006, 10(4): 1-8.
[3] 张宇文. 鱼雷外形设计[M]. 西安:西北工业大学出版社, 1998.
[4] 余德海, 宋保维, 杨世兴, 等. 鱼雷外形多目标多学科综合优化设计方法研究[J]. 兵工学报, 2008, 3(29): 337-340. Yu De-hai, Song Bao-wei, Yang Shi-xing, et al. Investigation of Integrated Multi-disciplinary and Multi-objective Optimi- zation of the Torpedo Shape Design Method[J]. ACTA Armamentirii, 2008, 3(29): 337-340.
[5] 胡坤, 王树宗, 徐亦凡. 基于免疫遗传算法的潜艇水动力系数优化研究[J]. 兵工学报, 2009, 29(12): 1532-1536. Hu Kun, Wang Shu-zong, Xu Yi-fan. Optimization Research on Hydrodynamic Coefficients of Submarine Based on Imm- une Genetic Algorithm[J]. ACTA Aamentirii, 2009, 29(12): 1532-1536.
[6] 成林, 张文明. 基于模拟退火法的矿用车辆卸料系统协同优化[J]. 中北大学学报, 2009, 3(20): 206-212. Cheng Lin, Zhang Wen-ming, Collaborative Optimization of Mining Truck¢s Hoist System Based on Simulated Annealing Algorithm[J]. Journal of North University of China (Natural Science Edition), 2009, 3(20): 206-212.
[7] Yukish M, Bennett L, Simpson T W. Requirements on MDO Imposed by the Undersea Vehicle Conceptual Design Probl- em [J]. AIAA 2000-4816: 1-8.
[8] Barr R A.A Review and Comparison of Ship Maneuvering Methods[J].SNAME Transaction, 1993, 1(10): 609-635.
[9] Sen D. A Study on Sensitivity of Maneuverability Perfor- mance on the Hydrodynamic Coefficients for Submerged Bo- dies[J].Journal of Ship Research, 2000, 44(3): 186-196.
[10] 黄景泉, 张宇文. 鱼雷流体力学[M]. 西安: 西北工业大学, 1988.
[11] Ramajeyathilagam K, Vendhan C P. Bhujanga R V. Non- linear Transient Dynamic Response of Rectangular Plates un- der Shock Loading[J]. Impact Engineering, 2000, 24(10): 999 -1015.
[12] 卢云涛. 全附体潜艇的流场和流噪声的数值研究[D]. 上海: 上海交通大学, 2008. Lu Yun-tao.Numerical Simulation of the Flow-Field and Flow-Noise of Fully Appendage Submarine[D].Shanghai: Shanghai JiaoTong University, 2008.
[13] Namgoong H, Crossley W A, Lyrintzis A S.Aerodynamic O- ptimization of a Morphing Airfoil Using Energy as an Objective[J]. AIAA 2007, 15(9): 2113-2124.
[14] 苏伟, 高正红, 夏露. 隐身性能约束的多目标气动外形优化设计[J]. 空气动力学学报, 2006, 1(24): 137-140. Su Wei, Gao Zheng-hong, Xia Lu.Multiobjective Optimiza- tion Design of Aerodynamic Configuration Constrained by Stealth Performance[J],ACTA Aerodynamica Sinica, 2006, 1(24): 137-140.
[15] Roth B D, Crossley W A.Application of Optimization Tech- niques in the Conceptual Design of Morphing Aircraft[C]// AIAA’S 3rdAnnual Aviation Technology Technology, Inte- gration, and Operations(ATIO) Tech, 2003, 1-11.
UUV Bow Profile Optimization Design Based on Adaptive Simulated Annealing Algorithm
PEI Xuan, ZHANG Yu-wen, WANG Ya-dong, YUAN Xu-long
(College of Marine Engineering, Northwestern Polytechnical University, Xi′an 710072, China)
Based on the theory of global searching in the multi-objective domain, this paper presents a method of optimizing an unmanned underwater vehicle (UUV) bow profile by adopting the simulated annealing algorithm. This method takes UUV bow fullness, hydrodynamics and flow noise as the goal function. An integrated UUV bow shape optimal design model is established by utilizing the classical viscous flow theory and the computational fluid dynamics (CFD) algorithm. The principle of choosing the complex shape parameters and design variables is described according to the optimization of UUV shape. The optimization design of an UUV bow profile is simulated, and the result shows that with the present method, we can effectively achieve the desired goals of UUV optimization design, and get the optimal solution from the domain composed of various objective functions which are restricted each other. The method greatly improves the acoustic performance and the hydrodynamic characteristic of UUV bow.
unmanned underwater vehicle (UUV); multi-objective optimization; simulated annealing algorithm; bow profile; integrated optimization design
TJ630.2
A
1673-1948(2011)02-0086-05
2010-06-01;
2011-08-01.
裴譞(1983-), 男, 在读博士, 研究方向为水下航行器总体设计与弹道计算.
(责任编辑: 陈 曦)
猜你喜欢
成都信息工程大学学报(2022年4期)2022-11-18
电力电容器与无功补偿(2022年4期)2022-08-20
噪声与振动控制(2022年4期)2022-08-19
河北水利(2022年5期)2022-06-10
交通科技与管理(2022年8期)2022-05-07
舰船科学技术(2021年11期)2021-12-12
中国金属通报(2020年2期)2020-06-30
软件(2017年7期)2018-01-24
电子技术与软件工程(2017年22期)2018-01-17
软件(2016年3期)2016-05-16