
单舵轮AGV路径跟踪方法的研究
2011-05-11 02:49耿牛牛
制造业自动化 2011年7期
耿牛牛
(机械科学研究总院,北京 100044)
单舵轮AGV路径跟踪方法的研究
耿牛牛
(机械科学研究总院,北京 100044)
0 引言
自动导引运输车即AGV,是装备有电磁或光电等自动导引装置,能够沿规定的导引路径行驶,具有编程和模式选择装置、安全保护及各种移载功能的搬运机器人。AGV具有自动化程度高、安全、灵活等特点,因而广泛应用于汽车制造、机械加工等自动化生产和仓储系统,它是柔性制造生产线和自动化立体仓库等现代化物流仓储系统的关键设备之一。AGV机器人可广泛应用于柔性系统的各个运输搬运环节,通过实时检测并控制正确的运动方向,按照系统指令自动存放、搬运各类半成品、成品零部件到规定的位置,从而实现数字化车间物料的自动搬运。
1 单舵轮AGV运动学模型
单舵轮AGV是一种常见的AGV结构形式,轮系部分主要包括1个舵轮和2个固定从动轮,也可以附加多个万向支撑轮。其中,舵轮与固定从动轮的布局方式和相对位置,决定了AGV的运动学模型,万向支撑轮对运动学模型无影响。对于单舵轮AGV,建立运动学模型的任务,是根据编码器返回值等已知条件,实时求解AGV的位姿(“位置与姿态”的简称,下同),用以实现AGV的实时定位。
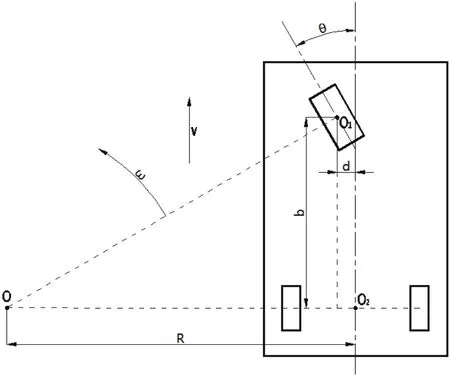
图1 单舵轮AGV轮系布局示意(俯视)
单舵轮AGV轮系布局示意如图1所示,其中O1点为舵轮回转中心,O2点为从动轮几何中心, b是AGV轴距,d是舵轮距中心线的偏移量(规定左侧为正方向);当舵轮旋转θ角度(规定逆时针为正方向)时,O为前后轮轴线交点,也是AGV瞬态回转中心, R是瞬态回转半径;假设当前AGV行走的线速度为 ,角速度为ω。由于在实际中, θ绝对等于零的情况不存在,因此只考虑θ≠0的情况,可求得:
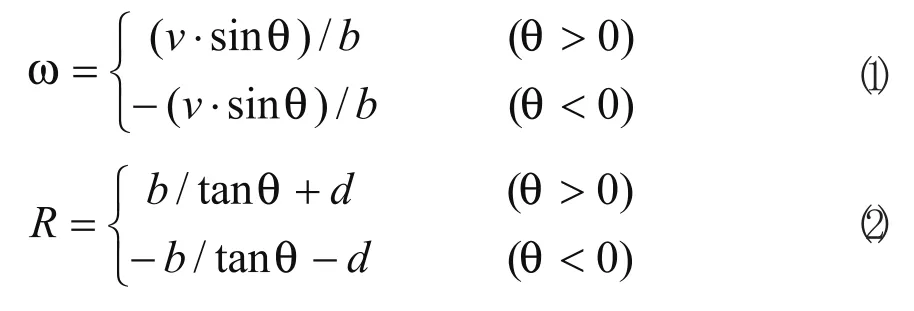

图2 AGV在坐标系内运动
如图2所示,定义AGV的位姿为(x,y,z),其中 x、y为从动轮中心(图1中O2点)在工作区域二维正交坐标系下的坐标,z为AGV姿态角(规定 轴正方向为0,逆时针为正方向)。假设对于一极小时间段Δt,AGV从动轮中心由A运动至B,A点位姿为(x0,y0,z0),B点为(x1,y1,z1)。因此
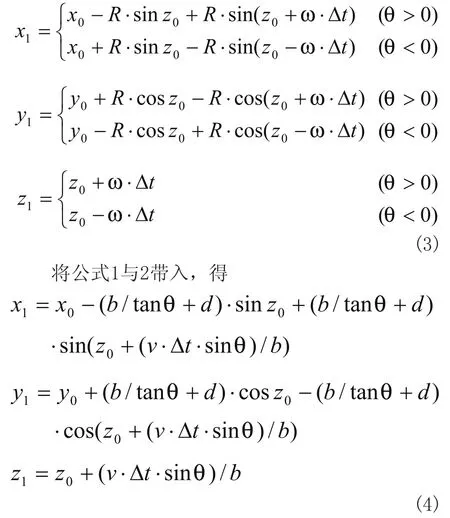
式中b、d为AGV的结构参数,Δt为已知量;为AGV车载控制器的一个程序运行周期,也是已知量;由行走电机编码器返回值可求解出AGV瞬态速度,即v值,同理,由转向电机编码器返回值可求解出 θ值。因此,由x0,y0,z0可求解出x1,y1,z1,只要已知AGV开机时的位姿初值,即可迭代求出任意时刻位姿。
2 行走误差校正
如图3所示,对于任意时刻,AGV由当前位姿又可求解出O1点坐标,进而可求解出O1、O1点到目标行走路径的距离d1、d2,即行走位置偏差。AGV根据d1、d2的大小和方向,综合考虑当前速度、安全要求、下一停位点距离等因素,调整舵轮转角,使AGV行走在与规定的导引路径近似重合的平滑曲线上,从而实现路径跟踪。
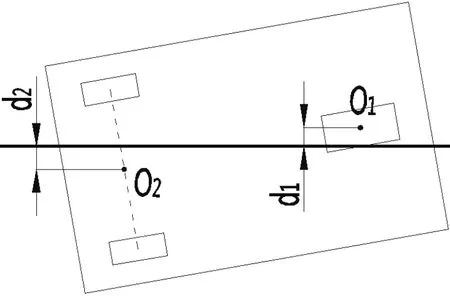
图3 AGV行走误差校正示意
3 结论
本文所提出的路径跟踪方法已应用于试验样车(如图4所示),辅助磁钉定位,测试路线为直线、圆弧及部分贝塞尔曲线,系统长时间连续运行,平均速度 ,AGV停位误差均在 之内,验证了该算法的正确性与可行性。
图4 AGV试验样车
[1]李进, 陈无畏,李碧春,王檀彬.自动导引车视觉导航的路径识别和跟踪控制[J].农业机械学报,2008,2,39,2:20-24.
[2]杨松华. 物流搬运AGV的轨迹跟踪与控制[J].控制与检测,2008,6:72-74.
[3]吴焱明,沈颍,张栋,赵韩.三轮无轨AGV轨迹误差的模糊控制研究[J].控制与检测,2006,11:52-56.
[4]廖华丽,周祥,董丰,王廷旗.基于模糊控制的AGV寻迹算法[J].哈尔滨工业大学学报,2005,7,37,7:896-898.
Path tracking technology of AGVs with single steer/drive unit
GENG Niu-niu
路径跟踪是AGV的基本功能模块之一,其主要功能是根据导航传感器的返回信号,实时计算并修正行走位置偏差,使AGV沿规定的导引路径行驶。其中,实时定位方法是路径跟踪技术的基础与核心。本文针对单舵轮AGV,提出了一种基于编码器信号计算的三自由度实时定位方法,通过定位信息互补,可以使AGV路径规划更加灵活,定位精度得到提高。
AGV;单舵轮;编码器
耿牛牛(1985 -),男,硕士研究生。
TP275
A
1009-0134(2011)4(上)-0081-02
10.3969/j.issn.1009-0134.2011.4(上).25
2010-11-08
猜你喜欢
中国惯性技术学报(2020年4期)2020-12-14
装备机械(2020年3期)2020-09-29
浙江海洋大学学报(自然科学版)(2020年5期)2020-06-19
中国设备工程(2019年7期)2019-05-10
电子技术与软件工程(2019年6期)2019-04-26
制造技术与机床(2017年7期)2018-01-19
陶瓷学报(2015年4期)2015-12-17
组合机床与自动化加工技术(2014年12期)2014-03-01
汽车电器(2014年8期)2014-02-28
传动技术(2014年1期)2014-02-27
