
高速动车组半主动悬挂系统几种控制策略对比仿真分析*
2011-05-04 03:39:06周洪涛朱红霞
铁道机车车辆 2011年1期
周洪涛,朱红霞
(石家庄铁道大学 机械工程学院,河北石家庄050043)
随着动车组运营速度的提升,其车体的振动性能随着运行速度的提高而面临新的挑战。轨道不平顺、空气动力和风力、车体轻量化特点以及本身存在的缺陷等因素是增加车体振动的主要原因[1]。采用车体控制技术来提高列车运行平稳性和乘坐舒适度是现阶段研究的热点。由于半主动悬挂系统在控制效果上接近于主动悬挂系统,且结构简单,无需力源,能量损耗小,可使整个系统小型化和轻量化,因此受到广大学者的关注[2-4]。由于传统的半主动阻尼器大多不能实现阻尼力快速连续调节,以磁流变液为工作介质的阻尼器在外加磁场作用下,其阻尼力可在几毫秒之内实现无级调节,适合于实时控制,且能耗非常低,因此在减小高速动车组振动方面有着广泛的应用前景[5,6]。
在半主动控制领域中有很多种控制方法,诸如,天棚阻尼控制、线性最优控制[7]、统计最优控制、智能控制等。由于天棚阻尼控制得到的阻尼力是近似值,线性最优控制的实施高度依赖系统模型的准确性,统计最优控制在线确定最优步长有困难[3],所以限制了它们在动车组半主动控制中的应用。在大量有关车体横向动力学文献中发现,大多都是以 3自由度[10],17自由度[14]等机车横向动力学数学模型以及单车模型[16]进行动力学仿真分析,它们并不能反映高速列车运行的真实状况。
为解决上述问题,利用Adams/rail建立基于磁流变阻尼器的高速动车组8车模型,在Simulink环境中与磁流变阻尼器模型、被动控制器、简单开关半主动控制器、一般模糊控制器和参数自适应控制器进行联合仿真。对于参数自适应模糊控制策略,通过对一般模糊控制的量化因子和比例因子的在线调整,有效实时的控制磁流变阻尼器所需的电流值,从而能有效控制动车组车体横向振动,提高动车组运行平稳性和乘坐舒适度。
1 磁流变阻尼器
由于磁流变效应复杂性,目前存在很多磁流变阻尼器力学计算模型[8],例如 Bingham模型、Herschel-Bulkley黏塑性模型、Bouc_Wen模型、修正的Bouc_Wen模型、Dahl模型等。在研究磁流变阻尼器的方法中,应用最多的是试验法,即根据试验数据,采用各种优化方法建立磁流变阻尼器的动力学模型[8,9]。由于Bouc_Wen模型具有光滑过渡曲线,易于进行数值计算、通用性强,因此采用文献[10]提出的Bouc_Wen立方力学模型进行仿真分析。其力学模型如图1所示。
磁流变阻尼器产生的阻尼力可由图1得出,

式(1)中参数z为滞变位移量,表达式为:

参数α为滞变位移系数;参数A和α为加载在阻尼器上励磁电流I的函数。
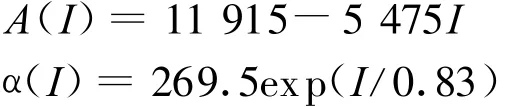
参数c0、γ、β对于固定的磁流变阻尼器是常数,通过试验验证,可以分别取值为600、500和1 000,通过仿真可以得到阻尼力—速度的滞回关系和阻尼力—位移关系,曲线如图2和图3所示。在Simulink环境中建立其数学模型,并封装成子系统如图4所示。其中输入为机车横向加速度a,速度v和电流I,输出为磁流变阻尼器的阻尼力F。
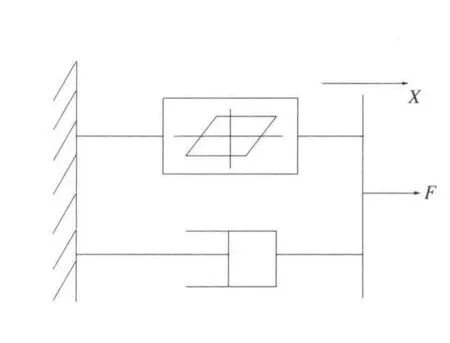
图1 磁流变阻尼器的Bouc_Wen立方力学模型

图2 阻尼力—位移关系曲线

图3 阻尼力—速度滞回关系曲线

图4 磁流变阻尼器力学仿真模型
2 高速动车组横向半主动控制减振器控制策略
2.1 基于天棚阻尼控制的简单开关控制
高速动车组横向振动天棚阻尼控制原理如图5所示,它假设在车体和一个“固定的物体”之间安装一个虚拟的天棚减振器,这个虚拟减振器始终提供的阻尼力只与车体的绝对速度有关,而与转向架和车体之间的相对速度无关。根据天棚原理,在高速动车组半主动悬挂系统控制中,减振力是由位于动车组车体与转向架之间的横向可调阻尼器提供的,其方向与相对速度的方向有关,大小与车体和转向架之间的相对速度和阻尼系数有关[3]。按天棚阻尼控制原理,列车横向半主动简单开关控制算法如下式:

式中F为可调阻尼器提供的阻尼力;c0为阻尼系数;x1为车体横向速度;x2为转向架横向速度。
简单开关控制的基本思想是当动车组车体与转向架之间的相对速度和车体横向速度之积为正时,即x1(x1-x2)≥0,阻尼器提供阻尼力,可以从一定程度上抑制车体的横向振动;反之动车组车体与转向架之间的相对速度和车体横向速度之积为负时,即 x1(x1-x2)<0,阻尼器停止提供阻尼力。

图5 高速动车组横向振动天棚阻尼控制原理图
2.2 模糊控制策略
高速动车组横向半主动悬挂系统是一个时变、非线性的复杂系统,传统的控制策略再提高其振动性能的品质较差。磁流变阻尼器也是一个非线性系统,线性最优控制方法、开关控制方法在实际运用中,不能很好的实时控制,也不能充分体现磁流变阻尼器的响应快、可逆可调的优点。参考文献[11—16]中发现,模糊控制特别适用于参数时变、非线性、强耦合且很难建立精确数学模型的系统控制。
模糊控制的基本思想是把普通集合中的绝对隶属关系灵活化,并利用专家经验来归纳控制规则作为控制策略,从而弥补高速动车组动态特性中非线性和不确定因素带来的影响。
由于动车组车体横向速度v和加速度a能较好的反映动车组振动特性,因此高速动车组横向半主动控制减振器模糊控制策略的基本原理就是以动车组车体的横向速度v和加速度a为模糊控制的2个输入,通过实施模糊控制策略,调节磁流变阻尼器的输入电流I,从而达到实时调节抑制动车组横向振动的目的。
模糊控制器中横向速度v和加速度a论域的确定是通过对被动控制的仿真结果中v和a的最大值为其论域范围。其论域分别为:v=[-0.85,0.85];m/s,a=[-0.3,0.3];m/s2。磁流变阻尼器的工作电流的基本论域为I=[0,2]A。控制规则中,车体横向速度v和加速度a所对应的语言变量均表示成为7个模糊子集[NB,NM,NS,ZE,PS,PM,PB]以反映速度和加速度的大小。磁流变阻尼器的工作电流I所对应的语言变量表示成9个模糊子集[ZE,PA,PB,PC,PD,PE,PF,PG,PH]来表示控制电流的大小。
模糊控制器中输入和输出的隶属度函数均采用高斯型,且它们的量化因子和比例因子kI均为1。建立模糊控制规则的标准是减小动车组车体横向振动加速度最小为目的。模糊控制规则表如表1所示。模糊控制器2个输入和输出的关系曲面由图6所示。

表1 一般模糊控制规则表

图6 模糊控制器输入量和输出量的关系曲面
2.3 自适应模糊控制
2.3.1 量化因子和比例因子对系统性能的影响
2.3.2 自适应模糊控制器
自适应模糊控制器中的2个输入及其论域,隶属度函数与一般模糊控制器中相同。其输出是量化因子和比例因子的调节系数u,其论域设为u=[0.6,1.7],隶属度函数为三角函数。u对应的语言变量U划分为7个模糊子集{UA,UB,UC,UD,UE,UF,UG}。其量化因子、比例因子参数自适应调节控制规则表如表2所示。自适应模糊控制器2个输入和输出u的关系曲面由图7所示。
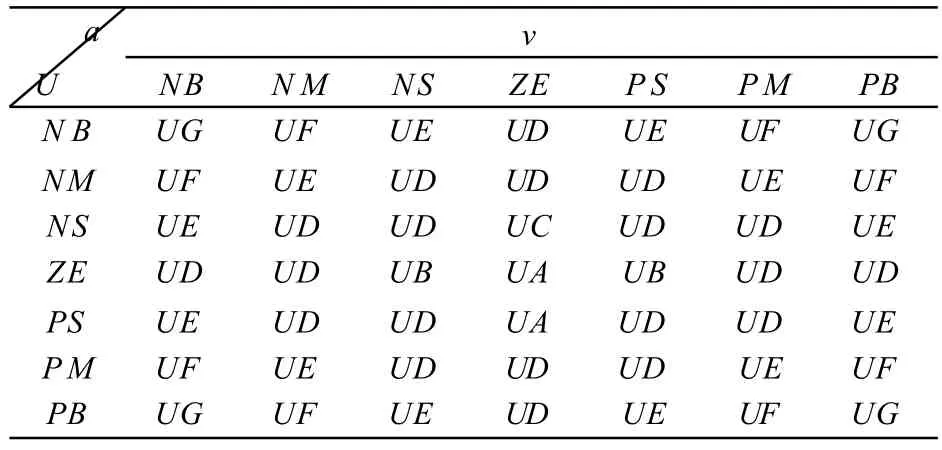
表2 参数自适应模糊控制规则表

图7 参数自适应模糊控制器输入量和输出量的关系曲面
3 Adams/rail建立动车组模型并通过Simulink对3种策略进行仿真
3.1 建立8车动车组模型
为了克服数学模型不能充分体现轮轨关系,动车组本身存在的强非线性特性等缺陷,利用Adams/rail建立4M4T动车组仿真模型。动车组仿真模型的质量、悬挂系统等参数如表3所示。
3.2 联合仿真
将已经建立的动车组仿真模型输出到Matlab中,并与已经建立好的磁流变阻尼器模型,以及简单开关控制器、一般模型控制器和参数自适应模糊控制器分别进行连接。联合仿真的基本原理是控制器根据Adams/rail动车组仿真模型输出的车体速度v1、加速度a和转向架速度v2进行调节磁流变阻尼器电流 I的大小,从而调控从Simulink中输入到Adams/rail动车组仿真模型中的横向阻尼力F,仿真模型根据调控力F对运行品质进行调节,并输出下一时刻车体速度、加速度和转向架速度,如此反复。
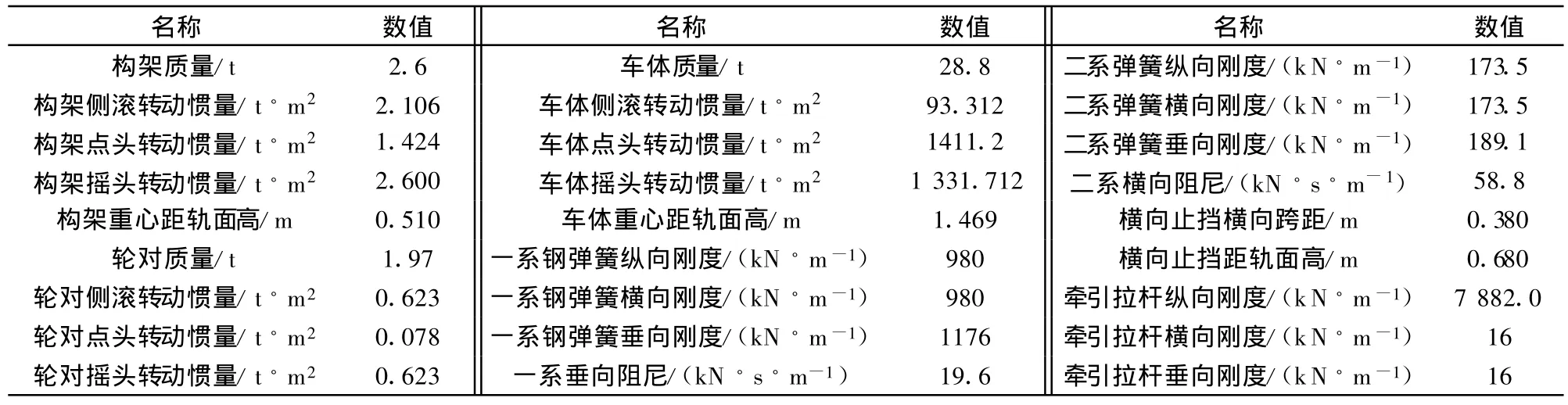
表3 8车动车组主要参数
基于磁流变阻尼器的动车组参数自适应模糊控制仿真和控制系统图如图8所示。

图8 参数自适应模糊控制系统仿真结构图
3.3 仿真结果分析
3.3.1 平稳性(乘坐舒适度)分析
在Simulink中进行动力学仿真分析时,设定动车组运行速度为200 km/h,采用美国6级轨道谱作为输入。图9为简单开关控制、一般模糊控制、参数自适应模糊控制下联合仿真的各车车体横向加速度对比,并对各车体横向加速度进行均方根运算,得到结果如表4所示。图10为各车体横向加速度均方根值的对比图。
由图9和图10可以看出,主动控制策略明显优于被动控制,一般模糊控制和参数自适应模糊控制的控制效果要优于开关控制,参数自适应模糊控制的控制品质最佳。根据GB5599-85[18],客车运行平稳性指标计算公式,其中W 为平稳定性指标,A为振动加速度(g),f为振动频率(Hz),F(f)为频率修正系数。由于本文采用振动频率为 f=200 Hz,频率修正系数F(f)=1。通过计算,被动控制和3种半主动控制策略平稳性指标W值如表5所示。根据GB5599-85客车平稳性指标等级可知,被动控制和3种半主动控制均处于等级1,评定性能良好。与被动控制相比,简单开关半主动控制的平稳性指标改善26.85%,一般模糊控制提高34.7%;与简单开关半主动控制相比,参数自适应模糊半主动控制的平稳性指标提高16.06%。因此,半主动控制策略能明显提高高速动车组运行的平稳性,即提高乘客乘坐舒适度;一般模糊控制和参数自适应模糊半主动控制在提高列车运行安全性方面的性能最好。
3.3.2 安全性分析
采用同样的联合仿真方法,Adams/rail动车组子系统模型输出每个轮所受的横向力Fx和纵向力Fy。根据GB5599-85求解脱轨系数和轮重减载率的方法,通过Matlab编程求解动车组32根轴在被动控制和3种半主动控制策略下的脱轨系数和轮重减载率,并求得每根轴的最大脱轨系数和最大轮重减载率。图11为头车前转向架第一根轴在4种控制策略下的脱轨系数和轮重减载率对比图。每节车体的最大脱轨系数和最大轮重减载率取前后转向架4根轴的脱轨系数和轮重减载率的最大值。表6为在被动控制和3种半主动控制策略下的动车组最大脱轨系数和最大轮重减载率,它们的值分别取8节车体的脱轨系数和轮重减载率的最大值。

图9 3种半主动控制策略下的各车车体加速度α仿真结果对比

表4 3种半主动控制策略下各车车体加速度均方根值结果对比
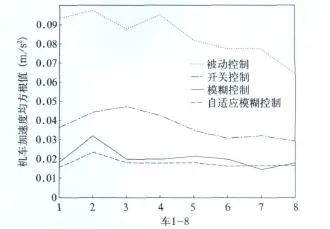
图10 3种控制策略下各车车体加速度均方根值对比图

图11 动车组中第一根轴的脱轨系数与轮重减载率在3种控制策略下的对比图

表5 被动控制和3种半主动控制策略平稳性指标W值
由表6可知,根据GB5599-85中列车运行安全性合格标准,被动控制和3种半主动控制策略均能符合其标准。简单半主动控制优于被动控制,一般模糊控制和参数自适应模糊控制性能最好。由表6可知,对于脱轨系数,与被动控制相比,简单开关半主动控制改善18.5%,一般模糊控制能改善28%;与一般模糊控制相比,参数自适应模糊控制性能提高3.2%。对于轮重减载率,与被动控制相比,简单开关半主动控制改善11.38%,一般模糊控制能改善27.7%;与一般模糊控制相比,参数自适应模糊控制性能提高5.94%。从而得知,半主动控制策略能提高高速动车组运行的稳定性,即运行的安全性,但提高效果不大;参数自适应模糊半主动控制在提高列车运行安全性方面的性能最佳。

表6 3种半主动控制策略下最大脱轨系数和最大轮重减载率值
4 结束语
通过Adams/rail建立高速动车组8车仿真模型,在Matlab/Simulink中建立磁流变阻尼器模型,同时设计了简单开关半主动控制器、一般模糊控制器和参数自适应模糊控制器,并在Simulink中进行被动控制和3种半主动控制的联合仿真,并对3种半主动控制策略进行对比研究。结果表明:(1)在动车组运行平稳性方面,半主动控制策略能明显优于被动控制策略,从而有效提高乘坐舒适度;在其运行的安全性方面,半主动控制策略优于被动控制策略,但提高效果不大;(2)与简单开关半主动控制策略相比,一般模糊控制和参数自适应模糊控制策略克服了其不能实时、连续对阻尼力进行调节的缺陷,有效抑制动车组车体横向加速度方面,控制品质较好,其中参数自适应模糊控制效果最佳;在减小脱轨系数和轮重减载率方面,一般模糊控制策略优于简单开关控制;(3)与一般模糊控制策略相比,参数自适应模糊控制策略的控制品质有所提高,但提高效果不大。在抑制车体横向加速度方面,平稳性指标W仅提高3.94%;在降低脱轨系数和轮重减载率方面,控制效果仅分别降低3.2%和5.94%。通过3种半主动控制策略与被动控制的对比分析,半主动控制策略在抑制动车组横向加速度,提高乘坐舒适度以及列车运行安全性方面有着广泛的应用前景。
[1] 丁问司,曹诗军.基于模糊控制的高速列车半主动减振器研究[J].液压与气动,2008,(12):14-16.
[2] 丁问司,卜继玲,刘友梅.我国高速列车横向半主动悬挂系统控制策略及控制方式[J].中国铁道科学.2002,23(4):1-6.
[3] 杨建伟.高速车辆横向振动半主动控制系统研究[D].铁道科学研究院博士学位论文,2006.
[4] 丁问司,刘少军,卜继玲.高速列车横向悬挂控制方式及半主动减振器[J].中国机械工程,2003,14(12):995-998.
[5] B.F.Spencer Jr.,S.J.Dyke,M.K.Sain and J.D.Carlson.Phenomenological Model of a Magnetorheological Damper.To appear in the ASCE Journal of Engineering Mechanics,l996,1(4):565-575.
[6] 刘超群,陈花玲,李海龙.磁流变阻尼器阻尼性能研究[J].振动、测试与诊断,2004,24(2):135-138.
[7] 王月明,吴学杰,张卫华.基于统计最优的车辆悬挂半主动控制的研究[J].铁道车辆,2002,40(5):16-18.
[8] 邓志党,高 峰,刘献栋,等.磁流变阻尼器力学模型的研究现状[J].振动与冲击,2006,25(3):121-126.
[9] Jansen L M,Dyke S J.Semi—active control strategies for M R dampers[J].Comparative study.Journal of Engineering Mechanics,2002,(8):795-802.
[10] 高国生,杨绍普.高速机车悬挂系统磁流变阻尼器试验建模与半主动控制[J].机械工程学报,2004,40(10):87-91.
[11] Joghataie,A,Neural Networks and Fuzzy Logic for Structural Control,Structural Research Series(M),1994.
[12] 胡家亮,周丽,严 刚.基于磁流变阻尼器的结构模糊半主动控制实验研究[J].振动与冲击,2009,28(3):131-135.
[13] 吴学杰,王月明,张立民,等.高速列车横向悬挂主动、半主动控制技术的研究[J].铁道学报,2006,28(1):50-54.
[14] 马新娜,杨绍普,邸书灵.基于磁流变阻尼器的高速机车横向半主动振动控制研究[J].振动与冲击,2009,28(7):126-130.
[15] 杜太行,董志然,顾 凯,等.汽车发动机转速自适应模糊控制方法的研究与仿真[J].河北工业大学学报,2008,37(2):7-11.
[16] 杨建伟,黄 强.基于模糊控制的高速车辆横向半主动悬挂仿真[J].系统仿真学报,2006,18(12):3 542-3 546.
[17] 杜太行,董志然,顾 凯,等.汽车发动机转速自适应模糊控制方法的研究与仿真[J].河北工业大学学报,2008,37(2):7-11.
[18] GB 5599-85.铁道车辆动力学性能评定和试验鉴定规范[S].
猜你喜欢
郑州大学学报(工学版)(2023年6期)2023-10-26 08:35:28
设备管理与维修(2022年21期)2022-12-28 07:33:54
疯狂英语·初中天地(2022年9期)2022-08-29 13:58:34
装备制造技术(2020年11期)2021-01-26 00:38:58
北京理工大学学报(2020年11期)2020-12-15 04:55:50
工业安全与环保(2020年10期)2020-11-05 05:51:04
四川建筑(2018年4期)2018-09-14 00:16:52
中国石油大学学报(自然科学版)(2015年2期)2015-11-10 06:08:17
噪声与振动控制(2015年4期)2015-01-01 07:08:24
振动、测试与诊断(2014年6期)2014-03-01 01:14:59
