
惯性导航系统水下校准新方法
2011-04-30 04:13汪湛清房建成
中国惯性技术学报 2011年4期
汪湛清,房建成
(1. 北京理工大学 自动化学院,北京 100081;2. 北京航空航天大学 仪器科学与光电工程学院,北京 100191)
水下运载体运行作业过程中,需要精确导航定位信息,这不仅为保证航行安全,尤其在执行某些特定任务,如海底地形、海洋学参数和物理场参数测绘时,导航定位数据是测量参数的基准信息,因此必须保证一定精度。运载体惯导系统长时间水下工作,位置误差随时间积累,解决惯导系统水下校准是一项关键技术。本文讨论了水下运载体惯性导航系统的误差积累问题,分析了水声定位系统的几种标准类型及其与惯导系统组合的可行性。在分析比较这些水声定位系统不同特点的基础上,根据有效组合、方便可用、易于实现的原则,提出用超短基线(SSBL)水声定位系统与惯性导航系统形成组合方案,解决惯导系统水下校准问题,并给出了INS/SSBL组合系统的装备方案和相关原理算法。
1 水下运载体惯导系统典型工作方式
通常,水下运载体装备由 DVL 辅助 INS,形成INS/DVL组合惯性导航工作方式。

表1 INS 惯性导航系统精度级别Tab.1 INS Classes
根据不同使用环境和要求组合方式会有所不同,但不论采用何种工作方式,均有随时间和/或随航程积累的定位误差。表1给出的是用于水下运载体定位导航的一组有代表性的DVL 和INS 精度数据。

表2 RDI Workhorse的DVL精度和作用距离规范典型数值Tab.2 RDI workhorse navigator DVL accuracy and range specifications ( o.s. – of speed)
DVL 辅助 INS 导航方式误差源为运载体固联速度误差和航向误差,在直线航路时这种误差随时间积累,没有外部位置信息不可观测。但是水下运载体在执行MCM、REA和精细海底测绘任务时,往往需要按“割草机”式(lawn mower pattern)航路运行。在运载体固联速度误差和航向误差较稳定的情况下,“割草机”式的往复航路和航向正反转变,对上述误差会有抵消作用。航向改变产生的另一个重要效应,速度误差在 DVL 辅助 INS 导航系统中成为可观测量。
由表3可见,不论采用何种组合方式或运行航路,DVL 辅助 INS 均存在随时间和/或随航程积累的定位误差。为了消除积累的定位误差,须借助外部准确的位置信息对惯性导航系统进行校准或组合。但是,由于水下不透明空间限制了电磁波和光波在水中传播,水面上层空间中可用的无线电导航、卫星导航、天文导航等技术在水下无法应用。许多运载体通常在较深的水下运行作业,为了获取准确的外部位置信息,水下运载体不得不浮出水面。频繁浮出水面一方面要消耗它们有限的动力,而且对于一些隐蔽性作业也不允许。这就提出一个必须解决的关键性技术问题:如何在水下消除惯性导航系统积累的位置误差从而对其进行校准。

表3 DVL辅助INS航路“割草机方式”定位误差减少效应(比对航路直线方式,DVL 1200 kHz,INS 1 n mile/h,纬度45°)Tab.3 Typical reduction in position error drift for DVL aided INS(When comparing a straight-line trajectory with a lawn mower pattern, the numbers apply for a 1200 kHz DVL,1 n mile/h IMU at 45° latitude.)
当前存在着一些水下校准的理论方法,即所谓地球物理场参数匹配,如重力场参数匹配和地磁场参数匹配等原理方法。但是,采用这些方法不仅需研制价格昂贵的测量设备和相应的算法软件,还必须采集、积累海量基准数据,用以形成具有相当密度和分辨率的地球物理场参数地图,这是采用物理场参数匹配的必要条件,这项任务的工作量,以及与其相关物理场参数匹配技术的现实可行性不言而喻。因此,寻求能有效消除惯性导航系统积累误差的现实可行的技术手段,是解决惯性导航系统水下校准的关键技术,也是本文提出并期冀解决的问题。
2 水声定位系统类型及组合校准可行性分析
20世纪70年代,在海洋工程、海洋经济、科学研究等需求牵引下,出现了水声定位设备,根据不同环境下不同对象的使用要求,出现了一些不同类型的系统。它们通常给出的是所谓“视在位置”,即两目标间的相对距离和相对方位;所以,它们不是真正意义上的导航设备,通常只限于根据特定环境下的特定需求,装备在活动于有限海域的特定载体上。
水声定位是一个特定的专业技术领域,在理论和实用设备方面都有充分的研究。因此,本文不准备研究水声定位系统自身的技术问题,而是根据惯性导航系统水下校准需求,对技术成熟并已商品化的水声定位系统类型进行分析、比较,提出一种现实可行的,INS/SSBL(惯性/超短基线)组合技术方案,解决惯性导航系统水下校准这一技术关键。
2.1 超短基线水声定位系统(Super Short Baseline System)
声基线长度 <10 cm (λ2)
2.1.1 超短基线水声定位系统的结构安装
如图1所示,超短基线的所有声单元(单元个数至少为 3)集中安装在一个收发器中,组成声基阵。声单元之间的相互位置精确测定,组成声基阵坐标系。声基阵应安装在舰船载体上,为便于讨论,可认为声基阵坐标系与载体坐标系匹配一致。
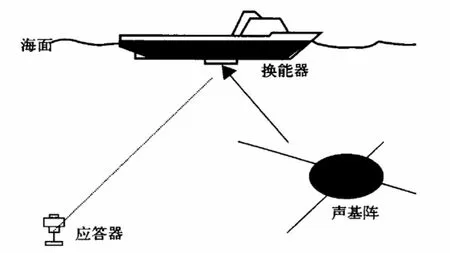
图1 超短基线定位示意图Fig.1 Diagram of super-short baseline acoustic system
2.1.2 超短基线水声定位系统的定位原理
系统通过测定声单元接收声波的相位差确定换能器到应答器的方向;换能器与应答器的距离通过测定声波传播的时间,确定距离进行定位,即角度/距离(angle/range)定位方式。
超短基线水声定位系统的测量基阵一般由排成等腰直角三角形的三个水听器组成,其定位原理如图 2所示。设目标位于S处,坐标为[x,y,z]。目标径矢为,S′为S在xoy平面上的投影, 它与x轴的夹角θ为目标在xoy平面的方位角。α为径矢与x轴夹角,β为径矢与y轴夹角。记1号水听器和2号水听器所接收声波的相位差为φ12,3号水听器和2号水听器所接收声波的相位差为φ32,当目标位置满足远场条件,在平面波模型下,有下列空间几何关系:

图2 超短基线定位几何原理Fig.2 Principle of super-short baseline acoustic system

式中,d为基线长度,R为目标斜距,C为水中声速,Δt为从发送信号到接收信号的时间差。实际的测量值为φ12、φ32、Δt,采用应答测距法根据Δt估计的R精度很高,所以x、y的精度主要取决于φ12、φ32的测量精度。通常阵元间相位差用自适应相位计来测量,这种方法有较高的精度。一种典型SSBL系统产品性能数据为:
定位精度 ------ 0.2% X 斜距;
角度精度 ------ 0.12º。
上述分析可以看出SSBL系统直接给出的“定位”数据是安装发射基阵载体与应答器两者在发射基阵坐标系, 即载体坐标系中的“相对”方向和距离,即所谓“视在位置”。
SSBL系统有如下特点:
第一,为获得目标在地理坐标系中的位置,需要根据安装发射基阵的载体艏向、姿态、地理坐标等数据,把“视在位置”变换为地理坐标系的“地理位置”,这样,SSBL系统必须与惯性导航系统组合,才能实现真正意义的定位导航。
第二,SSBL系统给出的是两目标的“相对”方向和距离,即“相对位置”。如果安装发射基阵的运载体位置已知,则安装应答器的水中目标可借此定位;反之,如果应答器的位置已知,则安装发射基阵的水下运载体可借此定位。这样,安装发射基阵的运载体不仅能对安装应答器的目标跟踪定位,同时在应答器位置已知情况下,还可对自身定位。这种“双向定位功能”不仅是解决惯性导航系统水下校准的现实可行的有效关键技术,同时还可借以实现水下多运载体协同导航。
第三,SSBL系统只有一个结构紧凑、体积不太大的换能器基阵,便于在目标载体上安装使用,不受海域限制。
2.2 短基线定位系统(Short Baseline System)
如图3所示,短基线定位系统由安装在目标载体的多于三个的换能器组成,换能器的阵形为三角形或四边形,组成声基阵。换能器之间的距离一般超过10 m,换能器之间的几何关系精确测定,组成声基阵坐标系,声基阵坐标系与载体坐标系的相互关系精确测定。短基线系统的测量方式是由一个换能器发射,所有换能器接收,得到多个不同的斜距观测值。系统根据声基阵相对载体坐标系的固定关系,借助外部设备提供的船位、姿态和艏向值,计算得到目标的大地坐标。系统的工作方式是距离/距离(range/range)定位方式。

图3 短基线定位示意图Fig.3 Diagram of short baseline acoustic system
短基线定位的主要缺点是: 深水测量要达到高的精度,基线长度一般需要大于40 m;多个换能器安装标校难度大,也不易避开噪声部位。
2.3 长基线定位系统(Long Baseline System )
长基线系统包含两部分,一部分是安装在载体上的询问器(interrogator), 另一部分是一系列已知位置的固定在海底的应答器,至少三个以上。应答器之间的距离构成基线,长度在上百米到几千米之间,相对超短基线、短基线,称为长基线系统。
长基线系统是通过测量询问器和应答器之间的距离,采用测量的交会对目标定位,系统的工作方式是距离/距离(range/range)。如果应答器的地理坐标已知,则安装询问器的载体可测得其地理位置。长基线定位系统的限制在于,多个应答器固定安装在海底,并须准确测定其地理位置,工程艰巨,造价昂贵,安装标校困难,而且作用范围只限于应答器覆盖的海域。

图4 长基线定位示意图Fig.4 Diagram of long baseline acoustic system
3 INS/SSBL优选组合方案及原理算法
从上述讨论明显可见,三种水声定位系统中,SSBL系统只有一个结构紧凑、体积不大的换能器基阵,在运载体上安装并与惯性导航系统组合,方便易行,实用有效,而且不受海域限制,特别是,SSBL系统“双向定位功能”及其可与多个应答器匹配的能力,不仅可在水下有效消除惯性导航系统积累的定位误差,同时还可解决多个运载体目标水下协同导航问题。所以,INS/SSBL组合系统是解决惯性导航系统水下校准的优选方案。
3.1 INS/SSBL优选组合方案
1)在装有惯性导航系统的运载体上安装SSBL系统换能器声基阵,用以对与其相关的应答器跟踪定位。
2)在与运载体协同运行的“协同目标”上,加装与运载体换能器声基阵相关的应答器,接受运载体的跟踪定位。
3)运载体与协同目标在确定范围海域运行活动时,运行活动开始即可借助INS/SSBL组合系统在海底适当位置,布放一个位置确定的应答器,向运载体惯性导航系统提供准确的定位信息,必要时用以对其校准;其它需被跟踪定位的协同目标,安装与运载体换能器声基阵对应的应答器,用以对其跟踪定位。
4)运载体与协同目标在不确定范围海域运行活动时,运载体可携带配备如图5的浮标。
图5表示浮标配备器件,其中包括GPS卫星导航接收机,用以控制浮标运行的浮标控制器,控制器中包含接收信息解码器和发送信息形成器;此外,还包括声学应答器,用以对水下INS/SSBL组合系统发送和接收声学信息;声学换能器用以对应答器进行“电-声”和“声-电”能量转换。当运载体惯性导航系统需在水下校准时投放浮标,使天线伸出水面,借助水声通讯传送回浮标位置信息,用以对运载体惯性导航系统进行水下校准。

图5 浮标配备器件Fig.5 Float buoy equipped with various devices
3.2 INS/SSBL组合原理算法
考虑到惯性导航和水声定位各自作为特定的专业技术领域,理论和工程应用已相当成熟,他们自身的原理算法不是本节讨论的内容。此处仅对 INS/SSBL组合情况下的原理算法做概要描述。


(References):
[1] Milne P H. Underwater acoustic positioning systems[M].Houston: Gulf Publishing, 1983.
[2] 田坦. 水下定位与导航技术[M]. 北京:国防工业出版社,1997.
[3] 吴永亭,周兴华,杨龙. 水下声学定位系统及其应用[J].海洋测绘,2003,23(4):18-21.WU Yong-ting, ZHOU Xing-hua, YANG Long.Underwater acoustic positioning system and its application[J]. Hydrographic Surveying and Charting,2003, 23(4): 18-21.
[4] 肖亮,韩焱. 基于多阵元基阵的超短基线声定位方法[J].导弹与制导学报,2006,26(4):263-265.XIAO Liang, NAN Yan. Ultra short baseline acoustic position method based on the multi-array-elements base[J].Journal of Projectiles Rockets Missiles and Guidance, 2006,26(4): 263-265.
[5] 汪湛清,汪顺亭. 水下运载体集群定位导航信息生成技术研究[J]. 舰船科学技术,2010,32(2):3-6.WANG Zhan-qing, WANG Shun-ting. Generation of the fixing and navigation information of the multiple-object of the underwater vehicles’ group[J]. Ship Science and Technology, 2010, 32(2): 3-6.
[6] WANG Zhan-qing, FU Meng-yin, DENG Zhi-hong, et al.Combined hydroacoustic position/inertial navigation system for underwater multiple objects[C]// Editorial Board of Journal of Chinese Inertial Technology.Proceedings of 2010 International Symposium on Inertial Technology and Navigation. Nanjing, China, 2010: 6-9.
[7] YANG Juan, XU Feng. A new method for the underwater acoustic positioning: Virtual short baseline positioning[C]//4th IEEE Conference on Industrial Electronics and Applications, IEEE/ICIEA. 2009: 3910-3913.
[8] Chas C S, Ferreiro R F. Introduction to ship dynamic positioning systems[J]. Journal of Maritime Research, 2008,V(1), 79-96
猜你喜欢
军民两用技术与产品(2021年7期)2021-10-13
湖北农机化(2020年4期)2020-07-24
铁道通信信号(2020年9期)2020-02-06
中国惯性技术学报(2019年3期)2019-10-15
水下无人系统学报(2018年5期)2018-11-09
科学与财富(2018年13期)2018-06-13
电子制作(2017年19期)2017-02-02
弹道学报(2016年4期)2016-12-14
铁道通信信号(2016年4期)2016-06-01
中国惯性技术学报(2015年1期)2015-12-19
