
基于小波包阈值处理的GPS软件接收机跟踪结果降噪算法
2011-04-30 04:13李寅寅徐晓苏刘锡祥
中国惯性技术学报 2011年4期
李寅寅,徐晓苏,刘锡祥
(东南大学 微惯性仪表与先进导航技术教育部重点实验室,南京 210096)
GPS软件接收机是为适应各种新的导航信号体制以及各种新的算法,基于软件无线电思想而提出的一种新的接收机实现方案。它具有灵活性的优势,能够方便的通过软件的方式对算法进行更改,从而适应不同的信号体制[1-2]。
GPS软件接收机中,GPS信号经过捕获、跟踪等过程后,输出跟踪结果,由位同步过程将其转换成导航数据位传给后续的过程,图1所示为软件接收机的基本框架。跟踪结果的好坏对整个软件接收机的性能起着决定的作用,由于跟踪环路受到诸如热噪声、振动等时变噪声的影响,跟踪输出的结果不可避免的要引入相位误差,从而影响位同步结果,进而影响整个接收机的性能。通常采用 IIR(无线冲击响应)滤波器解决软件接收机跟踪结果的降噪问题[3]。IIR滤波是基于频域的方法,要事先得到信号的频率特性和噪声特性,而这些先验信息是很难准确获得的,同时由于跟踪的信号中调制有GPS导航数据,因此跟踪的结果会包含有许多跳变点。同时由于IIR滤波器具有噪声反馈,噪声大,且运算误差大,因此对跟踪结果的降噪不能达到理想的效果。一般认为,对频率复杂的信号进行时域分析不能达到理想的效果,进行单纯的频域分析无法检测出时域中信号的突变点[4]。小波变换通过对信号进行多尺度分析,从而能够在时域和频域都能表征信号的局部特征,同时也能表征信号的突变点。本文将基于小波包分解的理论,采用软阈值量化并对量化后的信号进行重构,从而达到对跟踪结果滤波降噪的目的。

图1 GPS软件接收机基本框架Fig.1 Basic architecture of software GPS receiver
1 小波包消噪的原理及其步骤
利用小波包对信号进行消噪可根据特定的准则将需要的频段信息保留,而把其余频段的信号清零,进而对信号进行重构,就可以达到消噪的目的。因而只要在特定的小波包基上能将信号中的特征信号与噪声干扰分解到不同频段上,就可以方便地进行消噪处理。
信号f(t)可以被分解为希尔伯特空间L2(R)上的基底{βλ(t)}的线性叠加,将信号投影到空间上得到[4]:

系数{aλ}中能够直接体现信号的特征信息,因此可以通过处理系数aλ来代替处理信号f(t)。小波包变换将信号从时域空间分解到特定的小波包内积空间上去,使信号的特征信息集中在少数系数上,从而使得信号的冗余度大幅减少[5]。对实信号f(t)={s(n) },由小波包算子得小波系数为:

式中:Cj,1(n) =s(n),n= 0 ,1,...,N-1;符号为第j层的第m个小波包基的分解系数。根据小波变换局部极大值的理论,有效信号的小波系数的模要比噪声的小波系数的模大得多,因此只要去除白噪声的小波变换局部极大模造成的那部分能量,就可以将大部分噪声去除掉[5]。一般地,小波包消噪按如下步骤进行:
第一步:选择一个小波包基,确定所需分解的层次,然后对信号进行小波包分解。本文选择Harr小波包基对其进行3层分解,其分解的树状结构如图2所示。

图2 三层小波包分解的树状结构Fig.2 Tree structure of three-layer wavelet packet decomposition
第二步:在一个给定的熵标准下(如:Shannon熵,对数能量熵等),计算最佳树;在默认的Shannon熵准则下计算的最佳树结构如图3所示。

图3 最佳树结构Fig.3 Structure of the best tree
第三步:选择一个合适的阈值对每一层分解系数进行量化处理。
第四步:对经过阈值量化后的系数进行重构。
在上述的各步中,小波包基和阈值的选取以及如何进行阈值量化是关键,它们直接关系到信号消噪处理的质量。
2 基于小波包阈值处理的跟踪结果降噪算法设计
2.1 小波包基的选取
在对信号做小波包变换时,要求小波包在时域和频域都具有紧支性,紧支宽度越窄,小波包变换反映的信号高频细节的能力越强[6]。
针对GPS软件接收机跟踪模块输出信号来说,由于包含了导航数据跳变,因此瞬态特征显著,根据前面提到的理论和实际的信号可知,小波包基需要满足对称性的条件,因为需要对信号中的瞬态现象有较好的描述,如果小波包基不具有对称性,在信号跳变点处的分解是不具有对称性的,正负两方向的幅值大小不相等,若其中一部分因低于阈值而被清零,而另一部分被保留,则重构的信号在这些点出会有变形,引起信号的失真;同时,本文所研究的信号是不考虑高频部分的,将所有的高频部分作为噪声去处理,因此对小波包基的消失矩没有很高的要求,具有一阶消失矩就可以了;而消失矩的要求减少,自然就可以选择较窄的支撑宽度[7]。
综合上述分析,结合小波基选择中正交性、紧支性、对称性、平滑性与消失矩阶数等一般性要求,本文选择Haar小波包基(也即db1小波包基),作为小波包消噪的小波包基。在所有正交紧支撑小波包中,Haar小波包是唯一具有对称性的小波包,同时它的支撑长度又是最短的。最短的支撑一方面使计算量减少,另一方面,若一个变换值被置零,在重构的信号中它将影响到周围最小数目的点[4]。
2.2 阈值的选取和量化
阈值的选取和量化是降噪处理的关键,阈值选的过大或是过小都会影响消噪的质量。目前,关于阈值选取的算法主要有局部极大值法、全局单一阈值法和局部SURE多阈值法[4]。对变换系数进行阈值量化的方法主要有硬阈值法和软阈值法。
硬阈值消噪方法定义[4]为:

软阈值消噪方法定义[4]为:

式中:d(j,i)为小波包分解系数;λ为阈值。
用硬阈值算法对信号进行处理不能达到好的降噪效果,其消噪后的信号相比原信号有较大的均方误差;而采用软阈值法消噪后的信号在视觉上有较好的平滑性,但是会产生信号失真。由于小波包分解系数反映信号在不同的频带上的特征,因此很难找到一个统一的阈值对所有频带的系数进行统一的量化处理。本文采取软阈值算法,对不同频带上的小波包系数采用不同的阈值进行量化处理。具体原理如下:
采用基于 Stein无偏似然估计原理的自适应阈值选择算法,对高频序列的小波包分解系数,选择一个阈值t,对t进行似然估计,再最小化似然t,就得到了所选的阈值。具体算法如下:

式中:median为各细节小波包系数v的中位数。
3 仿真分析
选用 GPS软件接收机跟踪模块输出的结果作为原始信号,将经过经典IIR滤波器输出的结果与采用小波包消噪的滤波结果进行比较。为了衡量消噪的效果,采用信噪比(SNR)和相对均方误差(RMSE)作为衡量指标,计算公式分别如下[10]:

式中:I和Id分别为原始信号和消噪后信号。
GPS软件接收机是采用C/C++语言在VC6.0的开发环境下开发出来的,运行效率高,便于快速获得跟踪结果;软件接收机所处理的数据是NewStar210A中频信号采样器所采集保存的GPS L1频段的C/A码信号,对其中的9号和12号卫星跟踪得到的结果分别如图4和图5所示。
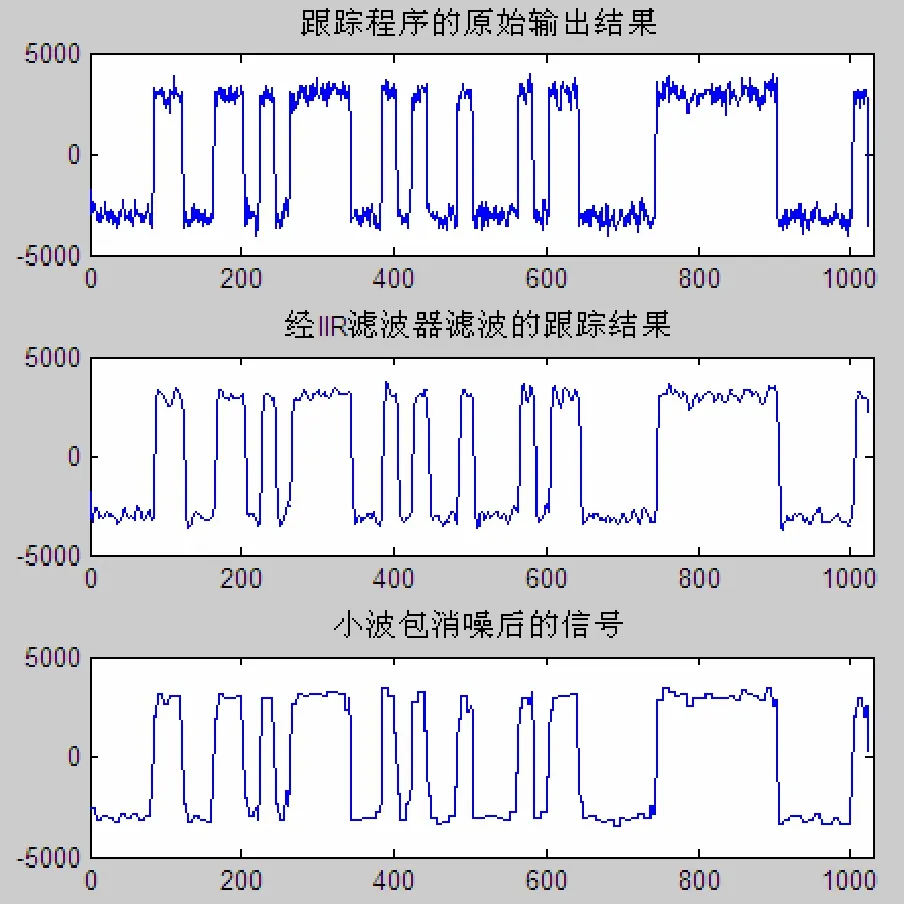
图4 9号星原始跟踪结果与两种降噪方法降噪后的结果的比较Fig.4 Comparison of results between original and two de-noising methods for Satellite 9

表1 两种方法消噪结果的信噪比(SNR)对比Tab.1 Comparison of two de-noising methods for signal-to-noise ratio (SNR)

表2 两种方法消噪结果的相对均方差(RMSE)对比Tab.2 Comparison of results between two de-noising methods for relative mean square errors (RMSE)
对图4和图5进行分析可以发现,与经典的IIR滤波器相比,小波包的滤波效果在直观上要优于 IIR滤波,经过滤波的信号叠加的高频噪声更少,更加平滑,分别对两种降噪方法降噪后的信号的信噪比增益和均方误差进行计算,两种消噪方法信噪比和均方误差的计算值如表1和表2所示。
从表1和表2所列出的结果可以看出,采用小波包消噪的方法,使两颗星跟踪结果的信噪比分别比采用IIR滤波器的方法提高了4.2406 dB和4.5587 dB,均方误差分别减小了0.1369和0.1557。
通过直观的对比以及信噪比和均方误差计算值的对比,可以得出结论,小波包的消噪效果优于IIR无限冲击响应滤波器。

图5 12号星原始跟踪结果与两种降噪方法降噪后的结果的比较Fig.5 Comparison of results between original and two kinds of de-noising method for Satellite 9
4 结论与展望
本文基于小波包分解与重构的思想,提出基于小波包软阈值降噪处理的方法,将实测的GPS软件接收机跟踪模块输出的信号进行三层小波包分解,在小波包分解系数的基础上,计算出小波包的软阈值,通过软阈值量化处理,剔除信号中的噪声,然后对信号进行重构,从而达到信号消噪的目的。
我们选取了两颗卫星的跟踪结果作为原始信号,仿真比较了IIR无限冲击响应滤波器降噪处理结果和小波包软阈值降噪处理结果。
仿真结果表明,小波包软阈值降噪处理在提高信号平滑度方面有较好的效果,同时能够很好地抑制随机噪声。统计结果表明,小波包分解软阈值降噪比IIR无限冲击响应滤波器降噪在信噪比上分别提高了4.2406 dB和4.5587 dB,在相对均方误差上分别减小了0.1369和0.1557。
目前,本文所研究的小波包消噪算法是对离线产生的信号进行后处理降噪,如何将软阈值小波包降噪算法实时在线实现并将其应用到工程实际中是将来研究的方向。
[1] 唐康华,吴美平,胡小平. 基于射频前端的GPS软件接收机设计与验证[J]. 中国惯性技术学报,2007,15(1):51-54.TANG Kang-hua, WU Mei-Ping, HU Xiao-ping.Design and validation of GPS software receiver based on RF front-end[J]. Journal of Chinese Inertial Technology, 2007, 15(1): 51-54.
[2] Cai Baigen, Wei Shangguan, Wang Jian, Liu Huichao.Design and realization of software receiver based on GPS positioning algorithm[C]// IEEE International Conference on Information Science and Engineering.December 2009: 2030-2033.
[3] Borre K, Akos D. A software-defined GPS and Galileo receiver: Single-frequency approach[C]// IEEE/ION GNSS, 18thInternational Technical Meeting of the Satellite Division. Long Beach, CA, 13-16 September 2005: 1632-1637.
[4] Donoho D L. De-noising by soft-thresholding[J]. IEEE Transaction on Information Technology, 1995, 41(3):613-627.
[5] 钱华明,马吉臣,李仲玉. 基于小波包阈值处理的光纤陀螺信号消噪[J]. 中国惯性技术学报,2007,15(5):602-605.QIAN Hua-ming, MA Ji-chen, LI Zhong-yu. Fiber optical gyro de-noising based-on wavelet packet soft-threshold algorithm[J]. Journal of Chinese Inertial Technology,2007, 15(5): 602-605.
[6] 于文新,张谦. 基于改进阈值消噪算法的小波包降噪[J]. 通信技术,2010,43(6):7-9.YU Wen-xin, ZHANG Qian. Signal de-noising in wavelet packet based on an improved-threshold function[J].Communications Technology, 2010, 43(6): 7-9.
[7] 郑钧,侯锐锋. 小波去噪中小波基的选择[J]. 沈阳大学学报,2009,21(2):108-110.ZHENG Jun, HOU Rui-feng. Selection of Wavelet base in denoising of wavelet transform[J]. Journal of Shenyang University, 2009, 21(2): 108-110.
[8] Sudha S, Suresh G R, Sukanesh R. Wavelet based image denoising using adaptive thresholding[C]// Conference on Computational Intelligence and Multimedia Applications.ICCIMA 2007: 296-300.
[9] Yu Ming, Guo Hang, Zou Chengwu. Application of wavelet analysis to GPS deformation monitoring[C]//IEEE/ION, Position Location and Navigation Symposium.Coronado, America, 2006: 670-676.
[10] O'Hanlon B W, Psiaki M L. Development and field testing of a DSP-based dual-frequency software GPS receiver[C]// ION GNSS, 22ndInternational Technical Meeting of the Satellite Division of the Institute of Navigation. California, America, 2009: 2099-2107.
猜你喜欢
导航定位学报(2022年1期)2022-02-17
科技风(2021年19期)2021-09-07
成都信息工程大学学报(2021年1期)2021-07-22
装备制造技术(2020年2期)2020-12-14
今日中国·法文版(2020年7期)2020-07-04
电子制作(2019年24期)2019-02-23
电子制作(2018年19期)2018-11-14
自动化学报(2017年4期)2017-06-15
电子制作(2016年1期)2016-11-07
探测与控制学报(2015年4期)2015-12-15
