
自适应迭代平方根UKF的单站无源定位算法
2011-04-13 09:21:22刘学焦淑红
哈尔滨工程大学学报 2011年3期
刘学,焦淑红
(1.哈尔滨工程大学 信息与通信工程学院,黑龙江 哈尔滨150001;2.中国人民解放军91245部队,辽宁 葫芦岛 125001)
在信息战环境下,有源雷达电磁隐蔽性、抗侦查、抗干扰、抗反辐射导弹能力差等弱点日益呈现.单站无源定位因为具有隐蔽性强、设备量小、作用距离远、机动性好,避免了复杂的时间同步和多个观测站之间的数据融合而备受重视,对现代信息战有着极其重要的军事意义[1].
单站无源定位是一个典型的非线性滤波问题.因此提高滤波器的稳定性、收敛速度和定位精度一直是研究的热点.UKF(unscented Kalman filter)通过构造一组确定的加权样本点经过非线性变换后对状态高斯随机变量参数进行逼近,避免了对非线性观测模型的线性化近似和雅可比矩阵的计算,并且对任何非线性系统都可以精确到二阶(Taylor展开),性能优于EKF及其衍生算法[2-4].但是在单站无源定位系统应用中,标准的UKF算法受数值计算舍入误差、可观测性弱和观测噪声大等因素的影响容易产生滤波不稳定、收敛速度慢和定位精度低等问题[5].为此文献[6]提出了IUKF算法,滤波性能较UKF有较大改善,但它是在UKF的基础上推导的,数值稳定性问题依然存在,为了进一步提高滤波算法的稳定性、收敛速度和定位精度,本文在SRUKF算法[7]、抗差自适应滤波理论[8-11]以及文献[6]提出的迭代策略基础上,推导出一种自适应迭代SRUKF算法,利用上一次滤波的状态估计值及协方差阵的平方根,对状态向量进行重采样,通过自适应迭代策略逐渐逼近状态估计和滤波协方差的平方根,从而提高了算法的稳定性、收敛速度和定位精度.
1 定位跟踪模型
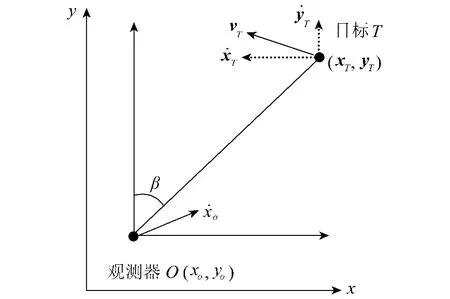
图1 观测器和目标在二维平面的几何关系Fig.1 Geometrical relation between observer and target in 2-D plane
系统的状态方程和观测方程可表示为


式中,K=2πd/λ,d为干涉仪间距,λ为信号波长.
2 自适应迭代SRUKF算法
2.1 标准的SRUKF算法
SRUKF采用误差协方差阵的平方根代替协方差阵参加递推运算,从而避免出现因为误差协方差矩阵负定而导致的滤波不稳定甚至不能工作的情况,提高了算法的运行效率和数值稳定性.算法具体流程如下[7].
1)初始化.

式中:Xa=[XTwTvT]T;La=Lx+Lw+Lv,Lw为状态噪声维数,Lx和Lv分别为状态向量和观测向量的维数;尺度因子λ=α2(La+κ)-La,κ一般取0,α控制采样点的分散程度为一较小的正数,取值范围10-4~1;β在高斯噪声条件下取2最优[7].chol表示Cholesky分解.
2)采样点计算.

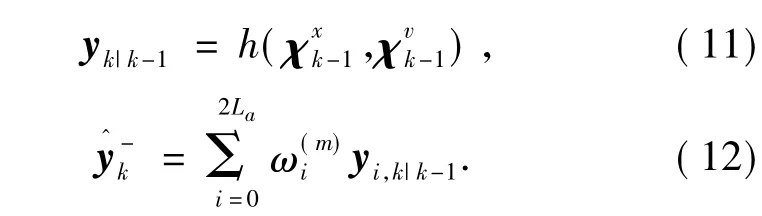
3)量测更新.

算法中qr和cholupdate分别表示QR分解和Cholesky一阶更新,为标准的matlab指令.
2.2 迭代策略的选择
尽管文献提出的Gauss-Newton方法的迭代策略具有全局的收敛性,但不能确保似然的增加,且判决门限的选择严重影响算法的性能.为确保似然一直是增加,文献[6]推导出了如下判决准则并提出了IUKF算法并证明了其收敛的原理:

对应SRUKF算法判决准应修改为

2.3 自适应因子的选取
抗差自适应滤波利用自适应因子调整状态信息对滤波估值的作用,使状态参数预测值的协方差更加合理,滤波精度明显提高[8-11].因此,本文将抗差自适应滤波的思想应用到SRUKF中,利用自适应因子和重采样迭代实时调整状态参数预测值的协方差矩阵的平方根,进而提高滤波的稳定性和估计精度.本文采用预测残差作为判别统计量,定义
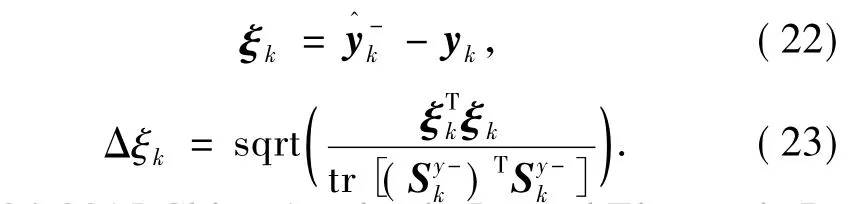
自适应因子的选取规则[10]如下:
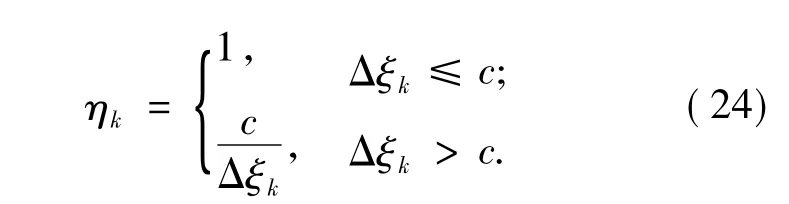
式中,c为经验值常数,通常选取1.0~2.5.
2.4 自适应迭代SRUKF算法流程
1)采用标准的SRUKF算法的步骤进行初始化、采样点计算和量测更新.
2)用式(22)~(24)选定自适应因子.
3)用下面式(25)~(29)更新标准SRUKF算法中对应的式(13)、(16)~(19):
5)采用步骤2)、3)的方法再次选定自适应因子和完成相对应式的更新.
6)如果式(21)不成立:且j≤N,N=3为选定的迭代次数上限.j=j+1;返回步骤4);否则,迭代中止,输出结果.
3 仿真实验与结果分析
仿真场景1:观测站固定位于原点,目标初始状态为[150 km -260 m/s 100 km 100 m/s]T;
仿真场景2:观测站初始状态为[0 km 100 m/s 0 km 100 m/s]T,目标初始状态为[250 km 200 km-250 m/s 120 m/s]T.
仿真中系统误差均为wx=wy=1 m/s2,本文提出算法(简称 AISRUKF)在不同的观测精度: 1){2 mrad,0.15 mrad/s,1 Hz};2){5 mrad,0.3 mrad/s,2 Hz};3){0.01 mrad,0.5 mrad/s,6 Hz}条件下对比EKF、标准的UKF、文献[2]的方法(简称IUKF)的算法性能进行测试,采样周期T= 1 s,目标辐射源频率 fT=9 GHz,观测精度 σfT= 1 MHz,干涉仪阵元间距为10 m.在观测精度1和2中观测次数N=120,在观测精度3中N=200,性能指标用相对距离误差RRE来测度[5]:
每组做100次Monte Carlo实验,在定位跟踪结束时刻RRE<15%则视本次试验收敛[5],否则视为发散.定位精度是为跟踪结束时刻RRE的平均值,仿真结果如表1、2和图2、3所示(各图中已剔除不收敛的实验结果).

表1 仿真场景1不同观测精度时稳定性与定位精度比较Table 1 Comparison of algorithms robustness and locating accuracy in differentmeasuring precision in scenario 1
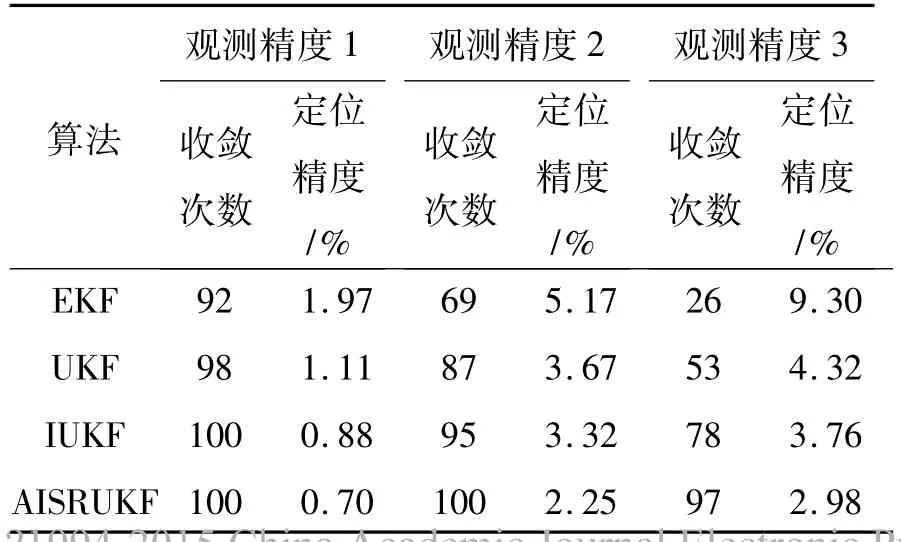
表2 仿真场景2不同观测精度时稳定性与定位精度比较Table 2 Comparison of algorithms robustness and locating accuracy in differentmeasuring precision in scenario 2
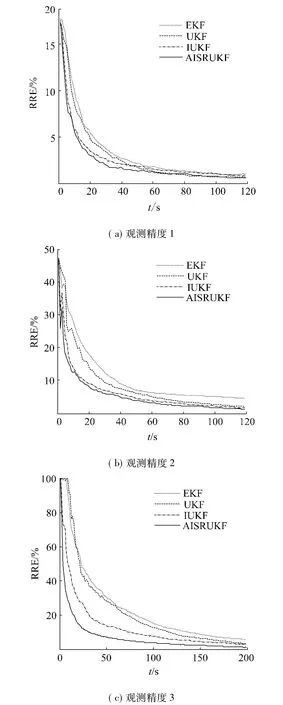
图2 仿真场景1不同观测精度各算法的统计平均曲线Fig.2 Statistical average curves of each algorithm in different measuring conditions in scenario 1

图3 仿真场景2不同观测精度各算法的统计平均曲线Fig.3 Statistical average curves of each algorithm in different measuring conditions in scenario 2
由表1、2和图2、3可知,在高精度观测时,各算法的性能均能有较好的表现,但随着观测精度的逐渐降低,各算法的性能开始发生变化,收敛速度变慢,滤波发散次数开始增多,稳定性下降,相比之下UKF性能优于EKF.IUKF通过对目标状态估计和协方差估计进行迭代更新后,收敛速度、收敛精度和稳定性上较标准的UKF算法有了较大的改善.但是基于UKF算法的IUKF算法也会由于数值计算舍入误差引起误差协方差矩阵负定,致使其在观测误差较大的条件下,稳定性也开始下降.本文提出的自适应迭代SRUKF算法基于SRUKF进行推导,提高了算法运行效率,保证了数值稳定性.利用自适应因子调整状态信息对SRUKF滤波估值的作用,运用自适应迭代策略使状态参数预测值的协方差更加准确,从而提高了定位收敛速度和跟踪精度.仿真结果表明该算法性能优于IUKF算法.
然而,迭代算法的缺点是运算量增加,IUKF方法的迭代算法是标准的UKF算法计算量的N倍(N为迭代次数),自适应迭代SRUKF算法采用QR分解以及Cholesky一阶更新算法求取误差协方差阵的平方根代替协方差阵参加递推运算,不需要每次都误差协方差矩阵进行Cholesky分解,提高了算法运行效率,但是比IUKF多2步的求自适应因子并进行判断和更新的步骤.运算量基本上与IUKF相当.
4 结论
1)采用相位差变化率、多普勒变化率相结合的定位方法降低了采用单一多普勒频率变化率定位方法实用性的限制,使得对测量精度的要求降低.
2)自适应迭代SRUKF算法采用误差协方差阵的平方根进行推导在保证数值稳定性的同时提高了算法运行效率.同时利用自适应因子调整状态信息对SRUKF滤波估值的作用,运用自适应迭代策略使状态参数预测值的协方差更加准确,进而提高了定位收敛速度和跟踪精度.
3)仿真结果表明新算法性能优于IUKF算法,且运算量与IUKF算法相当.因此结合以上的定位方法和算法在单站无源定位与跟踪系统工程化有较大的参考价值,同时也可以应用其他无源定位和非线性滤波领域中.
[1]孙仲康,郭福成,冯道旺.单站无源定位跟踪技术[M].北京:国防工业出版社,2008:65-120,187-198.
[2]ITO K,XIONG K.Gaussian filters for nonlinear filtering problems[J].IEEE Transactions on Automatic Control,2000,45(5):910-927.
[3]JULIER S J,UHLMANN J K,DURRANT-WHYTE H F.A new method for the nonlinear transformation of means and covariance in filters and estimators[J].IEEE Transactions on Automatic Control,2000,45(3):477-482.
[4]JULIER S J,UHLMANN J K.Unscented filtering and nonlinear estimation[J].Proceedings of IEEE,2004,92(3): 401-422.
[5]占荣辉.基于空频域信息的单站被动目标跟踪算法研究[D].长沙:国防科学技术大学,2007:40-47.
ZHAN Ronghui.Research on algorithms for single observer passive tracking with the information of spatial-frequency domain[D].Changsha:National University of Defense Technology,2007:40-47.
[6]ZHAN Ronghui,WAN Janwe.Iterated unscented Kalman filter for passive target tracking[J].IEEE Transactions on Aerospace and Electronic Systems,2007,43(3):1155-1163.
[7]MERWE R V D,WAN E A.The square root unscented Kalman filter for state and parameter estimation[C]//Proceedings of IEEE International Conference on Acoustics,Speech and Signal Processing.New York,2001:3461-3464.
[8]归庆明,许阿裴,韩松辉.分步抗差自适应滤波及其在GPS动态导航中的应用[J].武汉大学学报:信息科学版,2009,34(6):719-723.
GUI Qingming,XU Apei,HAN Songhui.A stepped robust and adaptive filtering and its applications in GPS kinematic navigation[J].Geomatics and Information Science of Wuhan University,2009,34(6):719-723.
[9]YANG Yuanxi,XU Tianhe.An adaptive Kalman filter based on sage windowing weights and variance components[J].The Journal of Navigation,2003,56(2):231-240.
[10]张双成,高为广.基于系统误差及其协方差阵拟合的抗差自适应滤波[J].地球科学与环境学报,2005,27 (2):60-62.
ZHANG Shuangcheng,GAO Weiguang.Adaptively robust filter based on synthetically fitting systematic errors and covariance matrices[J].Journal of Earth Sciences and Environment,2005,27(2):60-62.
[11]高为广,何海波,陈金平.自适应UKF算法及其在GPS/ INS组合导航中的应用[J].北京理工大学学报,2008,28(6):505-509.
GAO Weiguang,HE Haibo,CHEN Jinping.An adaptive UKF algorithm and its application for GPS/INS integrated navigation system[J].Transactions of Beijing Institute of Technology,2008,28(6):505-509.
[12]隋红波,王鼎,吴瑛.基于运动学原理的单站无源定位改进算法[J].信息工程大学学报,2008,9(1):66-69.
SUI Hongbo,WANG Ding,WU Ying.Passive location method of single-point based on kinematic passive range detection[J].Journal of Information Engineering University,2008,9(1):66-69.
猜你喜欢
——2022 F1意大利大奖赛
世界汽车(2022年5期)2022-06-10 10:18:36
加油站服务指南(2021年7期)2021-10-14 07:28:18
雷达与对抗(2021年4期)2021-03-18 02:33:16
电子制作(2019年12期)2019-07-16 08:45:14
北京航空航天大学学报(2017年6期)2017-11-23 05:57:06
互联网天地(2016年2期)2016-05-04 04:03:23
自动化学报(2016年8期)2016-04-16 03:38:55
无线电通信技术(2015年3期)2015-12-23 11:37:00
电测与仪表(2015年13期)2015-04-09 11:57:34
中国科学技术大学学报(2013年8期)2013-03-11 20:18:37
