
基于可拓决策理论的城市交通状态识别研究*
2011-04-10 10:42刘小明李颖宏张永忠
武汉理工大学学报(交通科学与工程版) 2011年2期
刘小明 王 灏 李颖宏 王 力 张永忠
(北方工业大学机电学院1) 北京 100144) (北京赛迪信息工程监理有限公司2) 北京 100048)
城市交通系统具有很强的非线性、随机性和时空关联性等特征,但大量研究实践表明[1],城市交通流以一定的时间尺度为分析单元表现出可重复的多种交通模式.有关交通流的状态判别,如文献[2]中应用多因素模糊模式识别方法评判交通状态,将其分为畅通、正常、拥挤、堵塞4个等级;文献[3]采用K均值聚类和EM算法相结合的方法,提取出特征向量以表征路口交通流运行状况,能够对典型区域路网交通状况进行评估;文献[4]选用较多的交通参数,设计提出了基于聚类方法的细粒度交通模式划分算法;文献[5]从交通数据管理的角度研究了交通模式与区域交通流特征问题,通过模糊聚类和数据挖掘的方法,得到代表区域交通网络特征的特征点和特征交通模式.
可拓学理论由我国学者蔡文教授于1983年创立[6],采用可拓识别方法可以定性和定量相结合,灵活地选择能够体现交通流特征的参数种类和数量,通过选择适当的特征因素,较为准确的对交通流模式加以识别.基于此,本文将利用可拓集合理论,通过建立关联函数,进而计算待识别交通模式的经典物元、节域物元的关联度,最终得到准确的交通模式评价结果.
1 交通流可拓识别物元模型
以城市中某区域的交通流作为研究对象,设该区域交通流的模式最终可以划分为m类,影响交通流处于何种模式的因素有n个,则该区域交通流模式的经典物元记为
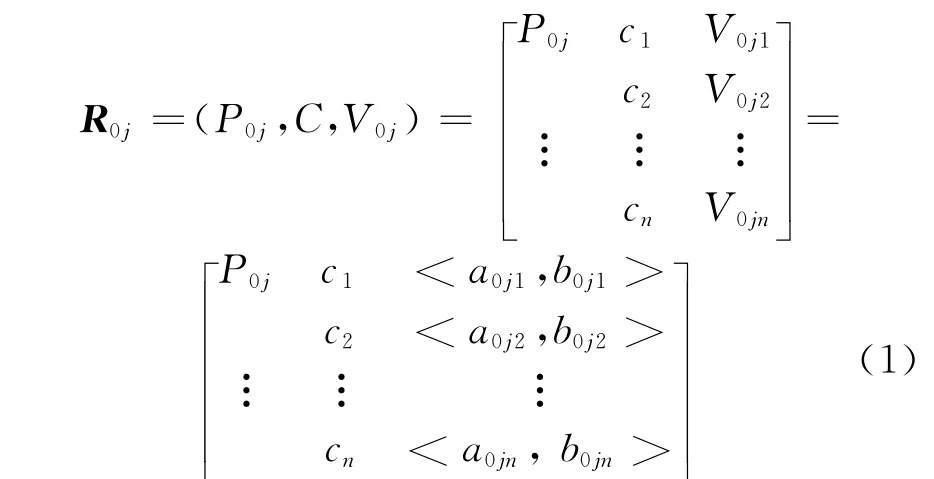
式中:P0j为区域交通流模式(j=1,2,…,m);ci为区域交通流模式P0j的特征,即影响该区域交通流处于何种模式的主要因素(i=1,2,…,n);V0ji为区域交通流模式P0j对应于影响因素ci的量值范围,即经典域<a0ji,b0ji>.
由集合P和它的n个特征ci及其将标准量值<a0ji,b0ji>范围加以拓广了的量值范围Vpi=<api,bpi>组成的物元称为节域物元,记为
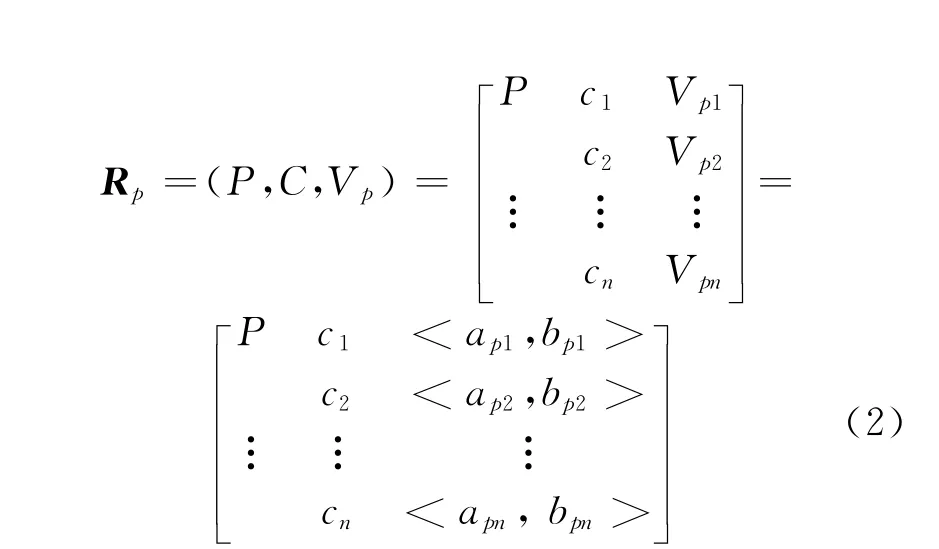
式中:P为区域交通流模式的全体;Vp1,Vp2,…,Vpn分别为P 关于c1,c2,…,cn的取值范围,即集合P的节域.对比式(1)和式(2)并根据可拓学中的定义,显然有V0ji⊂Vpi,(i=1,2,…,n).
对待识别的某区域交通流,将交通流模式、各影响因素的检测结果、各影响因素的取值范围用物元可表示如下.
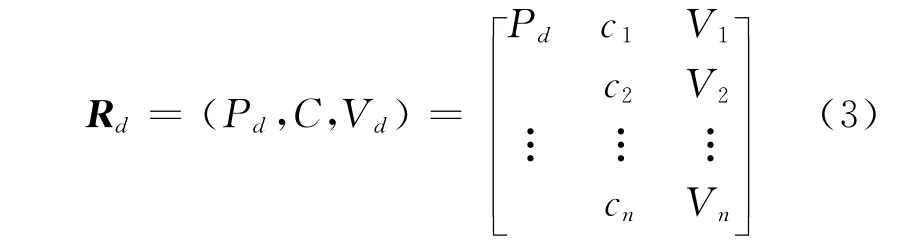
式中:Rd为交通流模式的待识别物元;Pd为待识别交通流模式;Vi为Pd关于特征ci的量值,即待识别区域交通流关于影响交通模式因素的实测数值.
在获得经典域物元、节域物元、待识别物元后,根据可拓决策理论,接下来需要求取第i个影响因素关于第j类交通模式的关联函数值,如下所示.

设各个特征的权系数分别为λ1,λ2,…,λn,则有

根据式(4)和式(5)可以计算待识别交通流p关于交通模式j的关联度为

假如Kj0=max Kj(p),则确定p属于交通模式p0j.以上判断p是否属于p0j的方法就称为可拓识别方法.该方法利用了关联函数可以取负值的特点,使识别方法能全面地分析对象属于集合的程度,同时也有助于从变化的角度来识别变化中的事物.
2 交通流状态经典域及节域的确定
隶属度函数合适与否直接影响到交通状态判定的准确率,本文采用文献[3]表示方法.

式中:i为交通状态为畅通模式;j为交通流速度特征.或i表示交通状态为堵塞模式,j表示交通流占有率或停车延误时间特征.

式中:i为交通状态为畅通模式;j为交通流占有率或停车延误时间特征.或i表示交通状态为堵塞模式,j表示交通流速度特征.

式中:i为交通状态为正常或拥挤模式;j为交通流占有率、停车延误时间或速度特征.
上述交通模式与单一交通参数之间映射的各隶属度函数中门限值aij,bij,cij,dij可以通过对大量交通检测数据的统计分析及专家打分等方式来完成,本文采用文献[3]中给出的数值,见表1.
根据上面的隶属度函数及对应的门限值,则交通状态识别条件物元的经典域可定义如下.


表1 在各种城市道路交通状态下的速度、占有率和停车延误的门限值

式(12)~(14)中:Rd1,Rd2,Rd3,Rd4分别为速度、占有率、停车延误时间三种交通流特征因素作用下畅通、正常、拥挤、堵塞四种交通模式的经典物元,其中堵塞模式中停车延误时间最大理论上可取无穷大,但由于交叉路口的最大控制周期一般不超过200s,因此为便于计算此处停车延误时间上限取为200s.
根据上面的隶属度函数及对应的门限值,则交通状态识别条件物元的节域可定义如下.

式(15)~(18)中:Rp1,Rp2,Rp3,Rp4分别为三种影响因素下畅通、正常、拥挤、堵塞四种交通模式的节域物元.
3 实例分析
通过检测器及浮动车等手段测得北京市学院路某待识别路段08:30~09:30间交通状态物元如下.

则根据式(4)可计算关联度,计算前要对影响交通模式的因素的量值采用极差化方法进行量纲一的量化处理.

式中:V′i为极差化后的数据;Vi为原始数据;Vimax,Vimin分别为第i因素的最大评价标准值和最小评价标准值.
对应表1,关联度计算如下.


通过专家调查确定权重分别为0.2,0.3,0.5,根据式(4)、(7)可计算
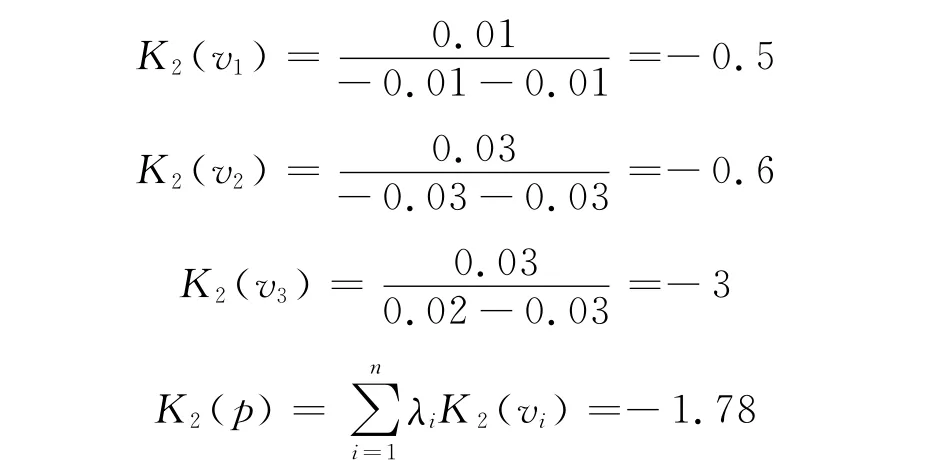
同理:ρ(v1,Vp31)= -0.01;ρ(v2,Vp32)=-0.03;ρ(v3,Vp33)=-0.03;ρ(v1,V031)=0.01;ρ(v2,V032)=0.02;ρ(v3,V033)=-0.02.

4 结束语
本文针对交通状态识别这一问题,提出了基于可拓决策理论的解决方法.值得提出的是,在应用可拓决策理论进行交通状态识别时,不同的交通环境所对应的经典域可能也有差别,如何针对具体应用确定最佳的经典域对后续交通状态识别的准确率至关重要;此外在识别过程中各输入参量的权重对最终的识别结果也有较大影响,在后续的工作中,研究更为先进的交通状态特征参数经典域及权重确定方法,将会对可拓学在智能交通系统中的应用起到重要的推动作用.
[1]TRB Special Report 209[R].Highway Capacity Manual,2000.
[2]戴 红.基于模糊模式识别的城市道路交通状态检测算法[J].吉林工程技术师范学院学报,2005,21(3):41-45.
[3]郭 伟,姚丹亚,付 毅.区域交通流特征提取与交通状态评估方法研究[J].公路交通科技,2005,22(7):101-114.
[4]李志恒,孙 东.基于模式的城市交通状态分类与性质研究[J].交通运输系统工程与信息,2008,8(5):83-87.
[5]张和生,张 毅,胡东成.区域交通状态分析的时空分层模型[J].清华大学学报:自然科学版,2007,47(1):157-160.
[6]蔡 文,杨春燕,林伟初.可拓工程方法[M].北京:科学出版社,1997.
猜你喜欢
中国交通信息化(2022年9期)2022-10-28
童话世界(2020年32期)2020-12-25
潍坊学院学报(2020年6期)2020-11-22
测控技术(2018年5期)2018-12-09
测控技术(2018年9期)2018-11-25
小学生导刊(2018年16期)2018-07-02
北方交通(2016年12期)2017-01-15
西南交通大学学报(2016年3期)2016-06-15
中国工程咨询(2016年1期)2016-02-14
武汉理工大学学报(交通科学与工程版)(2015年5期)2015-12-05
