
六转子微型飞行器及其低雷诺数下的旋翼气动性能仿真
2011-04-09 05:34:34高庆嘉
空气动力学学报 2011年3期
白 越,曹 萍,高庆嘉,孙 强
(1.中国科学院长春光学精密机械与物理研究所,吉林 长春 130033;2.长春工程学院理学院,吉林 长春 130022)
0 引言
随着MEMS、微电子、新型能源及计算机等技术的发展,微型飞行器的性能日益提高,已经具有了实用性[1-2]。微型飞行器具有体积小、重量轻、成本低的飞行平台优势,且其操纵方便、机动灵活、噪音小、隐蔽性好,因此无论是在军事领域还是在民用领域,都具有十分广阔的应用前景[3-4]。在军用领域,微型飞行器可用于敌情侦察、目标追踪、电子干扰、损伤评估、核生化取样、部署传感器、中继通讯、甚至主动进攻和防御。带有目标定位、信息传递以及攻击性武器的多种MAV可以集群发动“火蚁”战争。在民用领域,微型飞行器可用于环境研究、人道主义排雷、自然灾害的监视和救援等。
以产生升力的方式来分类,当前研究的微型飞行器总体上可分为三类:固定翼式微型飞行器、旋翼式微型飞行器和扑翼式微型飞行器。固定翼式微型飞行器升力由与传统飞行器一样的固定机翼产生,结构简单,但机动性不高。旋翼式微型飞行器升力由旋翼产生,其最大特点是可垂直起降和悬停,机动性比固定翼式好。扑翼式MAV是一类模仿鸟类和昆虫飞行的一类飞行器。其主要特点是将举升、悬停和推进功能集于一身,但其设计及气动性已经超出了传统的概念,远未达到实用化要求[5-9]。
当前世界的军事冲突大部分都是局部范围小规模的军事冲突,战斗场合多发生在城市背景下,特别是愈演愈烈的反恐战争,城市背景下对敌人的侦察、监视及位置确定等要求越来越重要。使用微型无人飞行器对于实现上述任务具有得天独厚的优势,甚至可以投掷炸弹等完成对敌人的清除。当前研究的三种微型飞行器的绝大部分共同存在的一个不足就是机动性不够,在执行任务的过程中无法很好的隐蔽自己的行踪,这样被敌方发现的可能性将成倍增加。
基于当前微型飞行器应用于反恐等城市作战需要的不足,本文提出了一种具有高度机动性的六转子微型飞行器的概念,该飞行器能实现快速前飞,悬停,前飞中任意方向滚转和偏航,当具有合适的外壳时甚至可以沿着地面或建筑物的垂直外壁滚动前进。根据任务的需要可以携带不同的载荷完成对敌侦察、监视及清除,或者对地震等自然灾害造成的封闭建筑内的被困人员情况进行侦察、输运给养等。本文将详细分析其空间配置结构与飞行器性能的关系以及旋翼在低雷诺数下的气动特性,确定该微型飞行器的最优结构,得到旋翼在低雷诺数下的气动力参数,为飞行控制系统的设计提供精确的动力学参数。
1 六转子微型飞行器的结构、配置及初步的动力学分析
六转子微型飞行器由居于正六边形的六个顶点的六个转子构成,包括其支撑结构及用于安放载荷的中心平台,如下图1所示,根据转子空间安装角度及位置的不同,飞行器有三种结构(如图1(a)、图1(b)和图1(c)所示),其自由体受力如图2所示,图2(a)、图2(b)和图2(c)分别对应图1(a)、图1(b)和图1(c)三种结构的受力状态。图 2 中 f1、f2、f3、f4、f5和 f6分别是六个转子旋转产生的升力。θ对应于旋转平面同机体平面间夹角,φ对应旋转平面在平台平面上的投影形成的椭圆短轴与一对转子连线的夹角。D表示阻力的合力,mg表示重力。α、β和γ分别表示阻力D与x轴、y轴及z轴的夹角。J表示飞行器的转动惯量,ω表示飞行器自身的旋转速度。
因此,图1(a)所示结构的飞行器运动方程为:

图1b所示结构的飞行器运动方程为:

图1c所示结构的飞行器运动方程为:

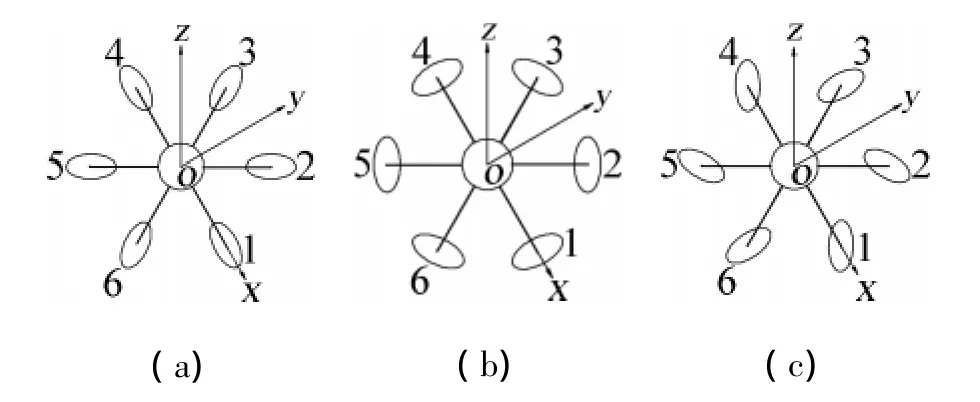
图1 六转子微型飞行器的配置结构Fig.1 The configuration of multi rotor flight vehicle

图2 六转子微型飞行器自由体受力图Fig.2 The free-body diagram of the vehicle in flight
分析运动方程组(1),该配置结构的微型飞行器可以产生任意方向的力及力矩;而运动方程组(2)显示了该结构的飞行器不能提供绕z轴的扭转力矩,即该结构的飞行器不用提供绕z轴的偏航操作,因此该结构配置有缺陷;分析运动方程组(3)可知,角度φ的出现减小了绕z轴的扭矩,同时也减小了沿x轴和y轴的力。综合以上分析,如图1(a)所示配置结构的微型飞行器具有最优的性能。
对于如图1(a)所示配置结构,相邻两个旋翼所产生升力的夹角ψ为:

当θ取54.7时,ψ等于90,此时旋翼产生的升力相互垂直,即三对旋翼产生的升力在空间正交,可分别对单轴进行控制不影响另两轴,无耦合,简化了控制。
2 旋翼低雷诺数下的气动性能分析
对微型飞行器来说,低速、小尺度和低雷诺数(Re)是其主要技术特征。MAVs决不是常规飞行器的简单缩小,在低雷诺数空气动力学设计上将面临巨大挑战。
飞行器旋翼采用最常用的低雷诺数翼型Eppler 387,根据其弦长及速度范围可以确定Re数的范围为1×104到12.8×104。Eppler 387在雷诺数Re小于6×104以下还未有人研究过,而大于Re小于6×104已经有现成的研究结果可以引用[10],因此重点研究Eppler 387在雷诺数Re小于6×104时的气动性能。
应用流体动力分析软件Fluent 6.1作为分析工具,采用正投影混合网格方法对其在低雷诺数下的气动性能进行研究,建立的分析模型有限元网格模型如图3所示。有限元分析结果的精度同网格尺寸具有直接关系,网格精度不够导致分析结果有误差,而过密的网格又造成了大量计算时间的浪费甚至无法得到分析结果,因此需要确定合理的网格密度。图4显示了在四种网格密度下升力系数随转子桨片攻角的变化曲线。四种网格密度分别为:(1)327个四边形内部网格和1809个三角形外部网格;(2)1280个四边形内部网格和6780个三角形外部网格;(3)5426个四边形内部网格和27534个三角形外部网格;(4)21975个四边形内部网格和91549个三角形外部网格。从图4可以看出,第一种网格密度不足,导致分析结果的精度较差,第二种网格密度分析结果相对第一种有了一定的改善,第三种密度网格分析结果同第四种密度网格的分析结果具有基本一致的精度,但第四种网格密度远大于第三种网格密度,需要的计算机机时更多,综合考虑,第三种密度的网格可以提供足够的分析精度,本文的后续分析中所使用的网格密度都采用条件(3)所对应的网格密度。
图5~图7分别给出了升力系数在雷诺数分别为Re=1×104、2×104、3 ×104、6 ×104下随桨片攻角的变化曲线、阻力系数在雷诺数分别为 Re=1×104、2×104、3×104、6×104下随桨片攻角的变化曲线、升阻比在雷诺数为 Re=1×104、2×104、3×104、6×104下的变化曲线。分析图5~图7,随着雷诺数的降低,升力系数减小而阻力系数增加,升阻比减小,因此随着雷诺数的减小飞行器的负载能力降低。当桨片的攻角大于8°时,因气流分离造成的升阻比随攻角的增大反而减小,对于本项研究的微型飞行器,攻角选在8°是合理的选择。图8给出了升力系数在雷诺数 Re=6×104下仿真结果与文献[10]中试验结果的比较,从图中可以看出,攻角从0°~6°,仿真结果同试验结果具有较好的一致性;当攻角大于6°时,仿真结果比试验结果约小6%但趋势一致,其原因是在这一攻角范围气流分离产生的前缘涡在实验中仅出现在外侧,内侧仍为附着流动。
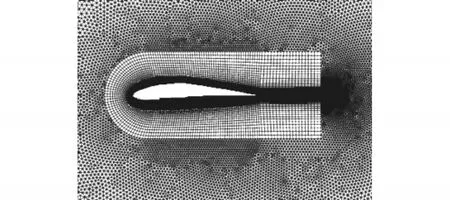
图3 分析模型的网格图Fig.3 Conformal hybrid mesh system for airfoil Eppler 387

图4 不同网格密度的升力系数曲线Fig.4 The lift coefficients C L under Re=1×105 with four grid density distributions

图5 升力系数分别在雷诺数 Re=1×104,2×104,3×104和6×104下随桨片攻角的变化曲线Fig.5 Lift coefficient comparison of Reynoldsnumber Re=1×104,2×104,3×104 and 6×104
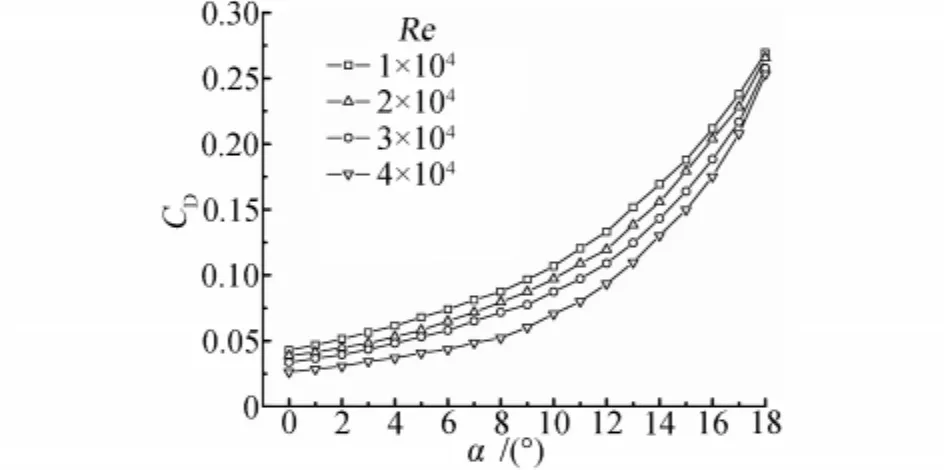
图6 阻力系数分别在雷诺数 Re=1×104,2×104,3×104和6×104下随桨片攻角的变化曲线Fig.6 Drag coefficient comparison of Reynoldsnumber Re=1×104,2×104,3×104 and 6×104

图7 升阻比在雷诺数为 Re=1×104,2×104,3×104和6×104下的变化曲线Fig.7 The ratio of lift coefficient to drag coefficient und-Reynolds number Re=1×104,2×104,3×104 and 6×104

图8 升力系数在雷诺数Re=6×104下仿真结果与实验结果的比较Fig.8 The comparison of lift coefficient between simulation and experiment under Re=6×104
3 试验
制作了如图1(a)配置结构的六转子微型飞行器样机,该飞行器的重量为3.12kg,旋翼翼型类型为Eppler 387,旋翼攻角为8°,安装角θ为54.7°。样机当前实现了垂直起飞和慢速前飞,下一步将进一步完善控制系统,提高飞行器的飞行品质。根据起飞时旋翼所对应的转速计算出实际的升力系数比仿真分析结果小5.26%,这一结果同参考文献[10]中试验结果相吻合。飞行试验证明本文所提出的飞行器原理可行,同时也证明了本文对翼型Eppler 387低雷诺数下的仿真结果是正确的。
4 结论
(1)合理配置六转子在空间位置,本文所提出的六转子无人飞行器可以在空中向任意方向飞行,提供合适外壳时甚至可以在地面上滚动前进。当θ取54.7°时,旋翼产生的升力相互垂直,即三对旋翼产生的升力在空间正交,无耦合。
(2)分析了Eppler 387在雷诺数小于6×104下的气动性能,随着雷诺数的降低,升力系数减小而阻力系数增加,升阻比减小,因此随着雷诺数的减小飞行器的负载能力降低。
(3)当桨片的攻角大于8°时,因气流分离的影响,Eppler387的升阻比随攻角的增大反而减小,对于本项研究的微型飞行器,攻角取8°是合理的选择。
(4)制作了六转子微型飞行器样机,实现了垂直起飞及慢速前飞,证明了该结构飞行器原理可行,同时也证明了本文对翼型Eppler 387低雷诺数下的仿真结果的正确性。
[1]周新春,昂海松.微型飞行器研究进展与关键技术[J].传感器与微系统,2008,27(6):1-4.
[2]MUELLER T J.Overview of micro-air-vehicle development[M]//Introduction to the Design of Fixed-Wing Micro Air Vehicles, AIAA-Education Series, AIAA Reston VA,2006:1-38.
[3]KELLOGG J C,Case study:micro tactical expendable rigidwing micro air vehicle[M]//Introduction to the Design of Fixed-Wing Micro Air Vehicles,AIAA-Education Series,AIAA Reston VA,2006:151-184.
[4]FEARING R S.Toward micromechanical flyers[J].The Bridge,2001,31(4):4-8.
[5]苏进展,方宗德,刘岚.微扑翼飞行器总体设计及实验[J].光学精密工程,2008,16(4):656-661.
[6]宋书恒,朱国林,张树海.微型飞行器低雷诺数矩形扑翼非定常气动特性的数值模拟[J].空气动力学学报,2008,26(2):239-245.
[7]RAMAMURTI R,SANDBERG W.Computation of aerody-namic characteristics of a micro air vehicle[M]//Progress in Astronautics Aeronautics.AIAA Reston VA,2001:537-555.
[8]BOHORQUEZ F,SAMUEL P,SIROHI J,RUDD L,PINES D,PEREL R.Design,analysis and performance of a rotary wing MAV[J].Journal of the American Helicopter Society,2003,48(2):80-90.
[9]BOHORQUEZ F,PINES D.Rotor design for efficient rotary wing micro air vehicles[M]//Proceedings of the AHS International Specialists'Meeting-Unmanned Rotorcraft:Design,Control and Testing.Chandler,AZ,2005.
[10]KELLY J C.Computational analysis of a prototype martian rotorcraft experiment[A].20th AIAA Applied Aerodynamics Conference[C].St.Louis,Missouri.,USA,2002:1-10.
猜你喜欢
实验流体力学(2023年1期)2023-03-21 01:41:06
装备制造技术(2020年1期)2020-12-25 05:18:18
空间科学学报(2020年4期)2020-04-22 01:17:20
宇航总体技术(2019年5期)2019-10-11 07:32:56
北京航空航天大学学报(2017年7期)2017-11-24 05:27:22
北京航空航天大学学报(2017年2期)2017-11-24 05:24:24
北京航空航天大学学报(2016年3期)2016-02-27 06:32:03
西北工业大学学报(2015年4期)2016-01-19 03:31:38
西北工业大学学报(2015年4期)2016-01-19 03:31:36
民用飞机设计与研究(2015年3期)2015-12-07 12:09:29
