
基于ADAMS的汽车悬架系统多目标优化设计
2011-03-27 07:31李文胜
长春工业大学学报 2011年2期
李文胜
(长春工业大学机电工程学院,吉林长春 130012)
0 引 言
汽车悬架系统是汽车底盘的组成部分,是影响汽车行驶平顺性、操纵稳定性和安全性的最重要因素。为了提高汽车的行驶性能,对汽车悬架系统的弹簧刚度和减振器阻尼的优化匹配设计是一个传统的研究课题[1]。随着人们对整车性能要求的不断提高和虚拟样机技术在汽车工业的应用,人们可以通过汽车仿真模型来预测汽车的动力学性能以及对悬架参数进行优化设计。对于汽车悬架优化而言,多数考虑以汽车的平顺性指标车身加速度来进行优化,而综合考虑车身的加速度和影响汽车操纵性的指标轮胎动载荷来进行多目标优化的研究工作为数不多[2]。文中以某车为研究对象,采用机械系统动力学仿真分析软件Adams/Car建立整车多体动力学模型,建立起以汽车车身加速度和4个轮胎动载荷为指标的多目标函数,并在随机路面下对悬架系统进行动态性能参数的匹配优化设计,提高了汽车的行驶性能,得到了比较满意的结果。
1 建 模
在Car/Ride中建立了基于四柱激励试验台的动力学仿真分析模型[3-6],如图1所示。

图1 四柱激励试验台的整车动力学仿真分析模型
此模型包括麦弗逊式前悬架、双连杆式独立后悬架、轮胎、转向系统、车身。建立仿真模型所需的几何定位参数(硬点坐标)、质量参数(质量、质心坐标与惯性矩)、力学特性参数(刚度、阻尼等)通过查阅相关技术文献及计算获取。
麦弗逊式前悬架、转向系采用系统自带模板,可大大减少建模的步骤和时间。前悬架组成为减振器、弹簧、橡胶元件、下三角摆臂、转向节、副车架、上滑柱、转向拉杆、轮毂。除副车架外,其它刚体都对称。
转向系为齿轮齿条转向器,由方向盘、转向柱、转向齿条等组成。
轮胎采用ADAMS/Car提供的UA解析轮胎模型,Adams/Car提供的基于四柱试验台进行平顺性仿真的轮胎主要有PAC2002,UA Tire,PAC_MC,FTire等。UA轮胎的主要特点是包含轮胎的纵向和侧向松弛效应。虽然 UA轮胎精度相对较低,但所需数据较少,参数容易获取,同时也能够满足文中研究的需要。
双连杆式独立后悬架在系统中无现成模板,需要重新建立。此悬架包括减振器、弹簧、橡胶弹性元件、支柱、上滑柱、副车架、纵向拖臂、前连杆、后连杆、轮毂。除副车架外,其它刚体都对称。
车身采用相同质量的钢球代替,对于文中的平顺性仿真而言,这样的简化结果对仿真影响很小,可以忽略不计。
对于关键的柔性连接件橡胶轴套,一般是通过试验来获取数据,而文中由于条件所限以及根据研究的需要,采用的是系统自带的轴套特性文件。通过对悬架系统的静力学分析可知,轴套的初始受力状况与实际基本吻合。在试验台上仿真也能顺利进行,故采用此轴套文件是正确的。
整车装配好之后要根据整车参数调整车身的质量与质心坐标,使模型的质心与实车保持一致。
根据研究需要,将车辆结构作如下的适当简化,既可满足研究需要,又可提高仿真速度,降低工作量。
1)除了轮胎、阻尼元件、弹性元件、橡胶元件以外,其余零件认为是刚体,在仿真分析过程中不考虑它们的变形;
2)假定阻尼力和弹簧力是线性变化的;
3)各运动副内的摩擦力忽略不计;
4)不计汽车发动机和传动系统对仿真结果的影响。
2 仿真优化
2.1 多目标优化设计
对车辆悬架进行优化时,既要考虑车辆乘坐的舒适性,同时还要考虑车辆的操纵性和安全性。综合以上两方面考虑,以车身垂向加速度均方根值和4个轮胎动载荷均方根值为目标函数[7],通过线性加权和法将此多目标函数化为单目标函数进行优化求解[8]。
2.1.1 目标函数
以车身垂直加速度均方根值为目标函数f1(x),以前、后、左、右侧4个轮胎的动载荷均方根值为目标函数 f2(x),f3(x),f4(x),f5(x),通过线性加权和法将多目标函数转化为下列多目标的评价函数,即

且满足

wi为各子目标函数对应的权系数,f1(x),f2(x),f3(x),f4(x),f5(x)分别为:

式中:a2(ti) ——车身垂向加速度;
N——采样点总数。
对各分目标函数进行统一量纲处理后得到

对于5个子目标函数根据其极小值,采用排序法[8]来确定其对应的权系数为:

2.1.2 设计变量
设计变量取为:

式中:k1,k2——分别为前悬架左侧、右侧弹簧刚度,N/m;
k3,k4——分别为后悬架左侧、右侧弹簧刚度,N/m;
c1,c2——分别为前悬架左侧、右侧减振器阻尼系数,N◦s◦mm-1;
c3,c4——分别为后悬架左侧、右侧减振器阻尼系数,N◦s◦mm-1。
各分量取值范围见表1。

表1 设计变量极限值
2.1.3 约束条件
1)在悬架设计过程中,通常认为车身结构以及性能参数是对称的,因此

2)对汽车的动挠度 fd要作出一定限制,随着动挠度的增大,悬架撞击限位块的概率加大,汽车的平顺性将变差。因为汽车的动挠度基本符合正态分布,其均方根值等于标准差[9],当动挠度的均方根值σfd≤[fd]/3时,可使悬架撞击限位块的概率小于0.27%[10],即:
式中:σfd1,σfd2——分别为前悬架左侧、右侧的动挠度均方根值;
σfd3,σfd4——分别为后悬架左侧、右侧的动挠度均方根值;
[fd]——限位行程,[fd]=70~90 mm[5],取[fd]=80 mm。
3)车轮的动载荷对行驶的安全性影响很大,因为车轮的动载荷也基本上符合正态分布,其均方根值等于标准差[9]。当车轮动载荷的均方根值σFd≤GF/3时,轮胎跳离地面的概率为0.135%[10],即

式中:σFd1,σFd2——分别为前轮左侧、右侧的动载荷的均方根值;
σFd3,σFd4——分别为后轮左侧、右侧的动载荷的均方根值;
GF1,GF2——分别为前轮左侧、右侧的静载荷;
GF3,GF4——分别为后轮左侧、右侧的静载荷。
4)乘用车的平顺性要求较高,前悬架满载偏频要求在1.00~1.45 Hz,后悬架则要求在1.17~1.58 Hz[7]。约束条件为:

式中:Kf,Kr——分别为前、后悬架刚度,N/m;
Mf,Mr——分别为前、后悬架簧载质量,kg。
5)为了减少汽车纵向角振动,一般汽车前、后悬架的偏频之比约为0.85~0.95[11],约束条件为:

式中:Kf,Kr——分别为前、后悬架刚度,N/m;
Mf,Mr——分别为前、后悬架簧载质量,kg。
2.2 优化分析
选用随机粗糙水泥路面,车速60 km/h,步长0.001 s,将该车的原始位置作为优化的初始位置,经仿真计算后可得到悬架的性能参数值、评价函数值,以及车身垂向加速度均方根值和轮胎动载荷均方根值。优化时采用的是系统提供的序列二次规划法SQP,这是目前较先进的非线性规划计算方法,其基本思想是:把原问题首先构造成二次规划子问题,该子问题的解就是此次迭代的搜索方向dk,沿此搜索方向进行一维搜索,确定步长αk,然后按照 xk+1=xk+αkdk进行迭代,最终得到原问题的最优解。优化结果见表2。

表2 悬架的性能参数优化结果
从表中可以看出:评价函数优化后收敛于1.011,下降了9.5%;前悬架的弹簧刚度变化较大,减少了44.75%,后悬架的弹簧刚度减少了14.47%;前后悬架阻尼的变化非常显著,都增加了一倍以上。
车身垂向加速度变化、轮胎动载荷的变化如图2~图11所示。
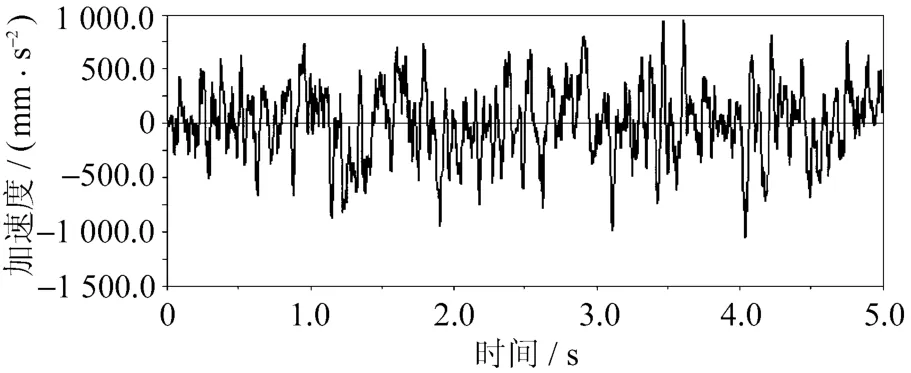
图2 优化前车身垂向加速度时域变化曲线

图3 优化后车身垂向加速度时域变化曲线

图4 优化前左前轮动载荷时域变化曲线

图5 优化后左前轮动载荷时域变化曲线

图6 优化前右前轮动载荷时域变化曲线

图7 优化后右前轮动载荷时域变化曲线

图8 优化前左后轮动载荷时域变化曲线
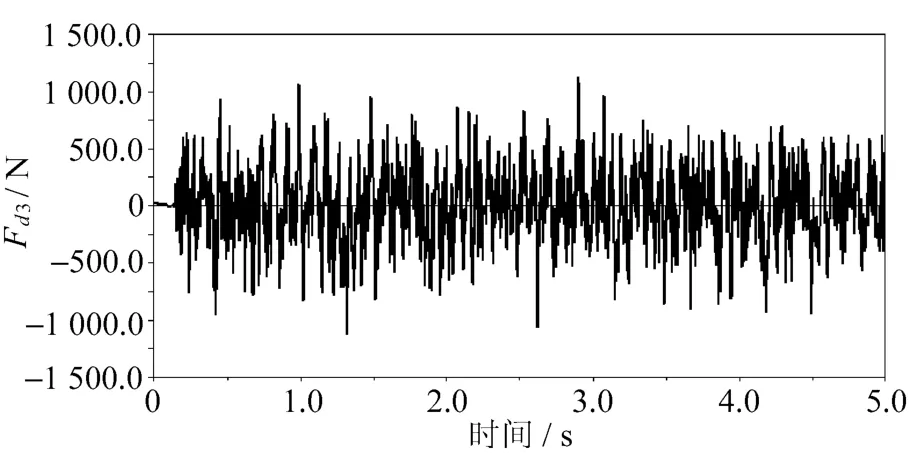
图9 优化后左后轮动载荷时域变化曲线

图10 优化前右后轮动载荷时域变化曲线

图11 优化后右后轮动载荷时域变化曲线
从图2~图11中得到的车身加速度和轮胎动载荷的均方根值比较结果见表3。

表3 车身垂向加速度、轮胎动载荷及评价函数值优化结果
从图2~图11及表3可知,优化后车身垂向加速度变化不明显,其均方根值仅增加了2.3%,基本上保持了原车辆的乘座舒适性,而轮胎动载荷却有比较明显的改善,其均方根值平均减少了11.17%。出现以上这种情况的原因是对于多目标问题而言,所得到的解一般都是非劣解,而非最优解,因此,只能通过某种形式的折衷来求得所能接受的最好的非劣解[12]。文中车身垂向加速度均方根值和轮胎动载荷均方根值是相互矛盾和冲突的悬架性能指标,无法使悬架的各性能要求都达到最优,要获得较高的乘座舒适性,必然会增大轮胎动载荷,反之,减少轮胎动载荷势必以牺牲乘座舒适性为代价。经过文中优化后,虽然车身垂向加速度均方根有小幅增加,但是轮胎动载荷均方根的降幅较大,明显改善了轮胎动载荷,因此,车身加速度的增加是在可接受的范围内,原车辆仍然保持着较高的乘座舒适性能。
3 结 语
文中考虑了汽车行驶的平顺性和操纵稳定性及行驶安全性,建立了整车动力学仿真优化模型,在此基础上对悬架性能参数进行了多目标优化设计。仿真优化后的结果表明:前后悬架刚度减少而阻尼增大,阻尼的变化较大;车身垂向加速度均方根值仅增加了2.3%,轮胎动载荷均方根平均减少了11.17%。这说明经过优化后,原车辆在基本保持乘座舒适性的同时,明显改善了轮胎动载荷,从而一定程度上提高了汽车的行驶性能,这也说明了文中的多目标优化是成功的。
文中所采用的基于ADAMS的优化技术为悬架性能参数的匹配设计提供了有效的方法,对在车辆开发过程中提高行驶的平顺性和操纵稳定性,降低开发成本,缩短开发周期有一定的现实意义。
[1] 苏小平.基于计算机仿真的汽车悬架性能参数设计[J].汽车电子,2009(2/2):245-246.
[2] 吕彭民.基于舒适性和轮胎动载的车辆悬架参数优化[J].中国公路学报,2007,20(1):112-114.
[3] 陈军.MSC.ADAMS技术与工程分析实例[M].北京:中国水利水电出版社,2008.
[4] 李增刚.ADAMS入门详解与实例[M].北京:国防工业出版社,2006.
[5] 陈立平.机械系统动力学分析与adams应用教程[M].北京:清华大学出版社,2004.
[6] 范成建.虚拟样机软件MSC.ADAMS应用与提高[M].北京:机械工业出版社,2006.
[7] 喻凡.车辆动力学及其控制[M].北京:人民交通出社,2004.
[8] 胡琉达.实用多目标最优化[M].上海:上海科技出版社,1990.
[9] 余志生.汽车理论[M].北京:机械工业出版社,2002.
[10] 范大茵,陈永华.概率论与数理统计[M].杭州:浙江大学出版社,1996.
[11] 王望予.汽车设计[M].北京:机械工业出版社,2010.
[12] 孙靖民.机械优化设计[M].北京:机械工业出版社,2003.
猜你喜欢
青少年科技博览(中学版)(2022年11期)2023-01-07
机械设计与制造(2022年5期)2022-05-19
汽车零部件(2019年10期)2019-11-13
测控技术(2018年11期)2018-12-07
北京汽车(2016年6期)2016-10-13
系统工程与电子技术(2016年7期)2016-08-21
西北工业大学学报(2015年4期)2016-01-19
现代制造技术与装备(2015年4期)2015-12-23
电测与仪表(2015年2期)2015-04-09
汽车维护与修理(2014年10期)2014-02-28
