
基于DSP的磁悬浮有害力矩测试仪的研究
2011-03-27 07:31梁慧群刘连芳
长春工业大学学报 2011年2期
梁慧群, 刘连芳
(长春工业大学电气与电子工程学院,吉林长春 130012)
0 引 言
三浮陀螺仪是在单自由度液浮积分陀螺基础上研制的高精度陀螺。磁悬浮技术作为三浮陀螺中的关键支承技术之一,它的主要作用是使仪表浮子沿输出轴定中心,使之完全脱离机械接触,克服重浮力残差、其它偏心负载和运动惯性力作用,有效地提高了输出轴的定心精度,从而提高仪表精度和长期稳定性。然而,磁悬浮的采用也引入了绕陀螺仪输出轴的干扰力矩,即磁悬浮有害力矩。为了获得仪表的高精度,必须使磁悬浮的有害力矩减小到最低容许的程度。磁悬浮有害力矩测试仪是开展磁悬浮各项研制工作以及批量生产的保障条件之一,对磁悬浮的发展及提升有着重要的现实意义,对推进三浮陀螺仪及其它液浮惯性器件的发展有着重要影响[1]。
DSP芯片数字处理器是一种具有特殊结构的微处理器,其内部采用程序和数据分开的哈佛结构,具有专门的硬件乘法器,广泛采用流水线操作,提供特殊的DSP指令,可用来快速实现各种复杂的数字信号处理算法。
1 系统总体设计
磁悬浮有害力矩测试仪的构成主要包括:支承部件(被测元件的装夹结构)、壳体、浮子组件(含陀螺电机、传受感器)、浮液、磁悬浮、平衡装置等,如图1所示。

图1 有害力矩测试仪组成示意图
磁悬浮支承对浮子组件施加作用力,如果磁悬浮作用力的方向永远通过浮子组件的旋转轴,那么磁悬浮将不对浮子组件产生干扰力矩。但实际情况下,磁悬浮作用力不可能完全通过浮子组件的旋转轴,那么在输出轴上将产生干扰力矩,陀螺仪将产生绕输出轴转动,使之与壳体之间出现绕输出轴的相对角位移。这时信号器就有信号输出,其输出为与偏转角成比例的调幅电压信号,该电压输入到壳体外部的信号检测电路,经过信号处理与变换,输出一成比例的直流电流至仪表的力矩器,产生与电流成比例的力矩。这一力矩绕输出轴作用在浮子组件上,在稳态时它与浮子力矩相等,此时,力矩器的力矩即为所测的有害力矩。
2 系统硬件电路设计
以信号调理电路、高性能的数字信号处理器(DSP)为核心的信号检测系统方案对输出信号和数据进行高精度的实时处理,当输出轴上有干扰力矩作用时,角度传感器对其敏感,输出一个与角度成正比的电压信号,对这个信号设计采集调理电路,解调出直流信号,DSP对采集来的数据进行数字滤波,将微弱信号提取出来。利用DSP的PWM产生两个脉宽可调制的信号,对力矩器前的桥式开关进行控制,保证力矩器流入恒定的电流[2]。
2.1 信号调理方案设计
角度传感器输出的为一微弱的毫伏级信号,需要信号调理电路使信号放大到ADC能够分辨和接受输入的电压范围之内。信号调理电路包括前置放大电路、带通滤波电路、相敏解调电路和A/D转换电路[3]。信号调理框图如图2所示。

图2 信号调理框图
前置放大电路采用新型精密仪表放大器INA118,它由美国B-B公司生产,具有精度高、功耗低、高共模抑制比(最小110 dB)、工作频带宽(单位增益为800 kHz)和抗干扰能力强等优点,适合对各种微小信号进行放大,其增益可通过调节引脚1和引脚8之间接入的电阻Rg来进行改变,从1到1 000不等[4],其放大倍数为:G=1+ 50 kΩ/Rg。
滤波电路采用美国B-B公司生产的通用有源滤波器UAF42,内部集成了一个反相放大器和两个积分器,采用状态可调模拟结构,通过改变电路参数就可设计成满足各种需要的高通、低通和带通滤波器,其设计方便,使用灵活。B-B公司还提供了一个仿真设计软件——FILTER42软件。利用该软件可以简化基于UAF42的设计,方便灵活地设计各种不同类型的滤波器,只需根据电路的要求将参数输入到此软件中,就可以计算出元件的相应值,还可以对滤波器的输出状态进行仿真。
相敏检波电路是具有鉴别调制信号相位和选频能力的检波电路。它可以通过鉴别调制信号相位来判别被测量变化的方向,同时它的选频能力使测控系统的抗干扰能力有很大的提高,相敏检波电路需要一个参考信号,可以用它对所需要解调的调幅信号的相位和频率进行判断[5]。本设计选用相敏检波电路为精密整流型,构成全波精密相敏检波电路,来提高仪器选择信号、排除干扰的能力,得到实际的输出信号。
2.2 DSP芯片选择
文中选用TMS320F2812作为核心处理器。TMS320F2812DSP是TI公司最新推出的32位定点DSP控制器,是目前市场上最先进、功能最强大的数字信号处理器之一,它既具有数字信号处理能力,又具有强大的事件处理能力和嵌入式控制功能,特别适合于有大批量数据处理的测控场合,能够实现复杂的控制算法[6]。
TMS320F2812为低电压,多电源DSP,其核心电压为1.8 V,I/O的工作电压为3.3 V,因此采用双供电方式,为了提高系统的稳定性和延长器件的使用寿命,系统对上电顺序有严格的要求: I/O电源要先于CPU电源上电,并且上电相差的时间不能太长,否则,将会对芯片的寿命产生影响,严重的甚至会损坏芯片。
2.3 ADC转换单元
A/D转换器模块采用 TMS320F2812的ADC模块,它是一个12位分辨率、具有流水线结构的模数转换器。为了满足大多数系统的需要,A/D转换器ADC模块共有16个输入通道,可配置成两个独立的8通道的模块,以便为事件处理器A和B服务。这两个独立的8通道模块也可以联成一个16通道模块,虽然在ADC模块中有两个排序器和多个输入通道,但是其内部实际上只有一个转换器。
为获得高精度的转换结果,应将连接到引脚ADCINxx的模拟量信号尽可能远离数字电路信号线,同时注意将引脚ADCL0接地,否则,将采集不到正确的数据。此 ADC模块需要一个3.3 V的模拟电压,我们设计用一个独立的3.3 V电源芯片为ADC模块提供电源,这保证了ADC模块的电源输入与数字电源的隔离,减少了因数字信号的转换产生的耦合干扰。
3 系统软件的设计
作为磁悬浮有害力矩测试仪,由于工艺水平和制造技术的限制,提高硬件精度往往需要付出很大的代价,甚至用硬件无法实现。因此,当系统硬件方案确定之后,其软件的设计对系统性能的影响是至关重要的,是系统能否正常工作,能否进行有效测试的核心。
本系统软件设计的核心思想是在利用硬件资源的前提下,利用软件来提高精度。利用TMS320F2812自带的A/D转换器件将微弱的模拟信号转换为高位数的数字量,然后采用数字信号处理的方法,对转换结果进行滤波去除干扰,取得高精度,并由TMS320F2812的PWM输出一脉冲宽度可调制的方波,作为力矩器的驱动电流。因此,程序主要是信号采集程序和数据处理程序及PWM方波的输出程序[7],软件设计采用模块化设计,下面对其进行介绍。
3.1 主程序设计
主程序软件流程如图3所示。
首先要配置DSP的工作环境,在本系统中采用定时器触发进行A/D转换,采集前主程序先调用初始化子程序对系统进行初始化,采用TMS320F2812片内集成的ADC模块进行数据采集;当转换完毕后,进入中断子程序,对接收的数据进行数据处理,同时控制输出PWM波形。

图3 主程序软件流程
3.2 初始化子程序设计
初始化子程序框图如图4所示。
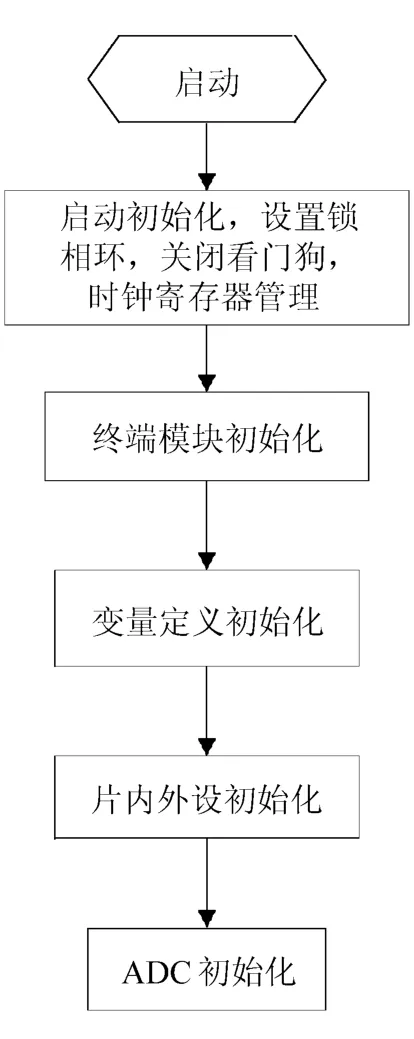
图4 初始化子程序框图
在初始化子程序中,主要是完成以下功能:设置内部时钟,CPU定时器初始化,关闭看门狗,锁相环使能,片内存储器周期、工作方式,外设接口等的初始化。串行口使能,允许串行口接收中断。对寄存器送命令字或赋初值,中断向量表初始化,屏蔽不需要发生的中断,对变量进行定义及初始化。对A/D采样模块进行初始化,包括模数转换模块的工作方式、通道选择、启动方式等的初始化。初始化完成后,子程序返回。
3.3 PWM脉宽调制模块
脉冲宽度调制PWM是开关电源控制技术中的一种,利用微处理器的数字输出来对模拟电路进行控制。它具有两个显著的优点:一是从处理器到被控系统信号都是数字形式的,不需要进行数模转换;另一个是对噪声抵抗能力的增强。
PWM是利用波脉冲宽度控制输出,在控制电路输出频率不变的情况下,通过电压反馈调整其占空比,从而达到稳定输出电压的目的。因其经济、节约空间、抗噪性能强,以及控制方法容易实现,所以在测量、通信和功率控制与变换的许多领域中被广泛应用[8]。
在本系统中,由TMS320F2812的PWM输出一脉宽可调制的方波信号,此信号经驱动后,与力矩器前桥式开关的两个接线点相连接,来控制力矩器的电流流入方向和电流的通断时间,力矩器的电流由恒流源提供。为了产生PWM信号,使用一个定时器重复按照PWM的周期来计数。用一个比较寄存器来保持调制值。定时器计数器的值不断地与比较寄存器的值进行比较,当两值匹配时,相关输出产生从低到高(或从高到低)的变化。当第二次匹配产生或周期结束时,相关的引脚会产生另一个从高到低(或从低到高)的变化。输出信号的变化时间由比较寄存器的值决定。这个过程在每个定时器周期按照比较寄存器不同的值重复,这样就产生了PWM信号。
4 结 语
提出了基于DSP的磁悬浮有害力矩测试仪的总体设计方案,硬件电路简单,易于实现。系统抗干扰性强,精度高,可实现复杂的控制算法。同时运用DSP输出PWM对力矩器进行控制,无需进行模数转换,参数调节灵活,为磁悬浮有害力矩研究提供一种技术途径。
[1] 张宗美.惯性仪表磁悬浮技术[J].国外导弹期刊,1983(5):51-57.
[2] 陈意瑶.基于ARM9的加速度计信号检测系统设计[D]:[硕士学位论文].上海:上海交通大学,2007.
[3] 张建华.微弱光电信号检测系统[J].光电子技术,2002,6(2):87-89.
[4] 杨昌金,王涛.精密低功耗仪表放大器INA118及其应用[J].国外电子元器件,2006(6):14-15.
[5] 陈是知,姜蕊辉.TMS320F2812原理与开发实践[M].北京:中国电力出版社,2010.
[6] 李瑞.基于 TMS320F2812的数据处理系统的设计与实现[D]:[硕士学位论文].北京:北京交通大学,2009.
[7] 郭涛,张英祥,陈峰.基于TMS320F2812的数据采集监测系统设计[J].机械工程与自动化,2002(1): 7-11.
[8] 尹熙鹏,段哲民.基于DSP的PWM型开关电源的设计[J].自动化与仪器仪表,2005(4):30-32.
猜你喜欢
小猕猴智力画刊(2022年4期)2022-05-23
小学科学(学生版)(2021年4期)2021-07-23
中国惯性技术学报(2018年4期)2018-11-08
中学生数理化·八年级物理人教版(2017年6期)2017-11-09
中学生数理化·七年级数学人教版(2017年6期)2017-11-09
山东青年(2016年12期)2017-03-02
光学精密工程(2016年6期)2016-11-07
浙江大学学报(工学版)(2016年2期)2016-06-05
航天制造技术(2016年6期)2016-05-09
探测与控制学报(2015年4期)2015-12-15
