
一种基于集成电路的旋翼转速调节器研制
2011-03-24 13:42卢建华刘爱元戴洪德
海军航空大学学报 2011年2期
卢建华,刘爱元,戴洪德
(海军航空工程学院控制工程系,山东 烟台 264001)
0 引言
传统的旋翼转速调节器采用分立元件设计,电路复杂、元器件多,故障率高、精度差、维修难度大。随着电力电子技术的发展、专用集成器件[1]的应用,特别是直流伺服电动机控制技术[2]的发展,为采用集成电路技术设计旋翼转速调节器成为可能。这不仅可以改善直升机的操纵性能和飞行性能,提高系统的工作可靠性,而且可降低地勤人员对直升机的保障压力,保证直升机的完好率和出勤率。
1 Multisim 10仿真工具
Multisim 10[3]软件作为电路设计的辅助设计工具,得到了越来越广泛的应用,具备以下突出特点:
1)集成环境简洁易用。Multisim 10 集成了从电路创建、修改到仿真及数据处理的EDA 设计的主要流程,不仅方便软件学习和使用,而且极大地提高了工作效率。
2)虚拟实验仪器丰富。Multisim 10 作为一个功能强大、仪器齐全的虚拟电子实验平台,不仅提供了常用的仪器(如万用表、示波器等),还提供了许多单位无条件具备的网络分析仪、频谱分析仪等仪器。方便了设计人员的设计工作,大大提升了软件的功能。
3)分析功能多样。Multisim 10 提供了多种仿真分析方法,有直流工作点分析、瞬态分析、傅里叶分析、噪声和失真分析等19种之多,满足了电子电路的分析设计要求,尤其是极具特色的RF 电路分析功能,是一般EDA 软件所不具备的。
4)输入输出接口具有广泛的兼容性。Multisim 10可以打开具有Spice 内核的其他EDA 软件生成的网表文件,EWB4.0、EWB5.0 环境下生成的电路文件,也可以把Multisim 10 环境下创建的电路原理图文件导出为.NET 或.PLC 文件,供Protel、Ultiboard等PCB 软件进行印刷电路板设计,或者将当前电路文件导出为网表文件,供其他EDA 软件共享设计成果。更具特色的是Multisim 10可以将仿真分析结果导出为Excel 文件,方便设计人员对结果数据的分析。
5)可自定义设计环境。Multisim 10 提供了极具人性化的设计工具,允许设计人员自定义设计环境,利用Options Preferences⋅⋅⋅菜单项,可根据设计需要,灵活设定元器件采用的符号标准、电路图的显示属性、工作区的显示属性及其大小、说明文字的格式、导线线型等设计要素。另外,Multisim 10 还支持VHDL和Verilog 语言的电路仿真与设计。
2 总体设计方案
直升机旋翼转速调节系统[4]由旋翼转速调节器与执行机构、油门组合装置、发动机、减速器等共同构成。旋翼转速调节器是直升机旋翼转速调节系统的核心部件,其作用是直升机在飞行过程中,无论处于什么飞行状态,通过其调节,保证与直升机最佳特性和参数相对应的旋翼转速一定。以某型直升机为例,当直升机飞行速度小于150 km/h时,旋翼转速稳定在207 r/min;当其转速大于150 km/h时,旋翼转速稳定在212 r/min。
经过对旋翼转速调节器的组成、功能和性能的分析研究,基于集成电路旋翼转速调节器的总体设计方案如图1所示。
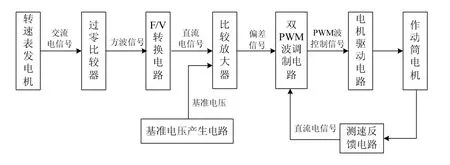
图1 旋翼转速调节器总体设计方案原理框图
转速表发电机实时敏感旋翼的转速,输出频率与旋翼转速成正比的三相交流电,取出其中一相,经过零比较器电路转换成方波信号,其频率与交流电频率相同,该信号送到F/V变换电路,将频率信号转换成相应的直流电压信号输出。该直流电压信号与基准电压产生电路所产生的基准直流电压信号进行比较并放大,输出旋翼转速偏差信号。此偏差信号经双PWM 波调制电路进行调制,输出的双PWM 波控制信号经电机驱动电路功率放大后,控制作动筒电机转动。当旋翼转速小于基准转速时,偏差信号为正,电机正转,油门增大,旋翼转速增加;当旋翼转速大于电机的基准转速时,偏差信号为负,电机反转,油门减小,直升机旋翼转速下降。从而保证旋翼转速的恒定。
速度反馈电路[5]的作用是使作动筒电机的转速与其负载的大小无关。速度反馈信号通过减法器电路与偏差信号综合。当作动筒电机的负载增大时,电机转速下降,测速反馈信号下降,输入到PWM调制电路的调制信号变大,电机控制信号变大,电机加速;当作动筒电机的负载减小时,电机转速上升,速度反馈信号上升,电机控制信号减小,电机减速,从而实现电机的转速与负载的大小无关。
3 详细电路设计
3.1 过零比较器电路设计
以LM339[6]为核心芯片进行设计,原理电路如图2a)所示,其输入输出信号波形如图2b)所示。该电路将输入的正、余弦形式的交流电信号转换成方波信号,方波信号与交流电信号的频率相同,满足频率/电压转换电路对输入信号的要求。

图2 过零比较器原理电路及其输入、输出波形
3.2 频率/电压转换电路
频率/电压转换电路的作用是将过零比较器输出的方波信号转换成大小与之频率成比例的直流电压信号。采用LM2917[7]频率/电压变换芯片实现。所设计的原理电路如图3所示。
图3中,C1为定时电容,为充电泵提供内部补偿,它的大小直接影响R1上所产生的误差电流值;C2为积分电容,起到滤波作用,其值取决于纹波电压的大小和实际使用中所需响应时间的要求;R1为输出电阻。在综合权衡纹波电压、响应时间和线性度之间的相互影响,本设计中取C1=0.05 μF,R1=100 kΩ,C2=0.47 μF,可获得满意的转换结果。
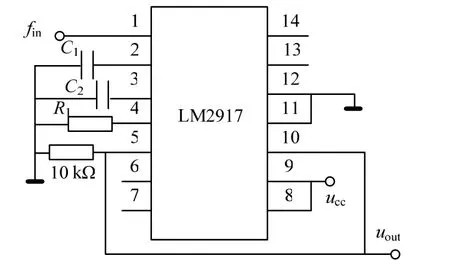
图3 频率/电压转换电路
该电路输出电压u0由下式决定:

式中:fin为输入信号频率;K为增益常数,取值为1。根据该公式可计算出与207 r/min和212 r/min 这两个基准转速相对应的基准电压值,分别为8.737 V和8.947 V。
3.3 基准电压产生电路设计
采用LM317[8]构成的可调集成稳压器[6]实现基准电压产生电路的设计,电路如图4a)所示。
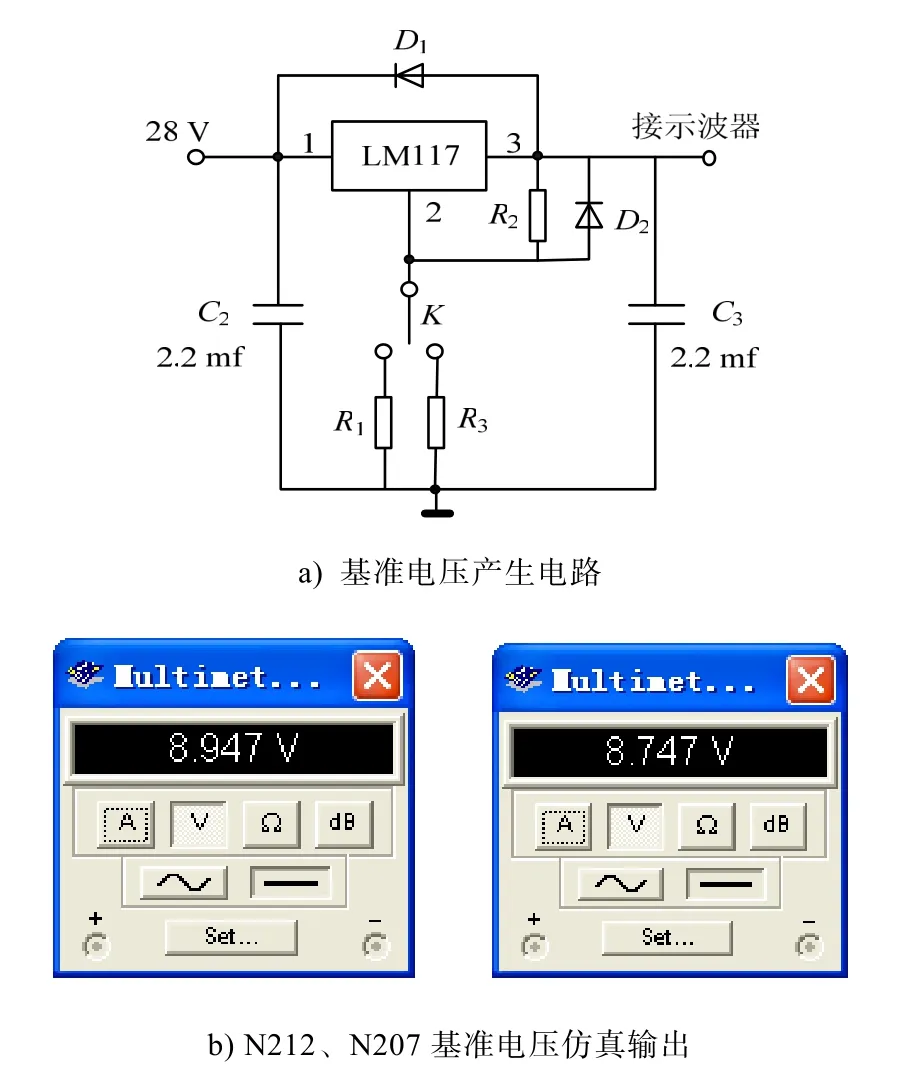
图4 基准电压产生电路及两基准电压仿真输出
该电路通过开关K位置的转换,分别产生与两个基准转速相对应的参考电压。电路输出电压根据式(2)确定,改变R1、R3阻值的大小可改变参考电压的大小。当R2取200 Ω,R1=1163 Ω,R3=1194 Ω时,K在不同位置时,输出的仿真电压如图4b)所示,仿真结果与计算理论值基本一致(带来的误差为电阻R2与保护二极管并联引起,经计算并联D2后R2的值相当于187.65 Ω)。

3.4 比较放大电路设计
应用AD620 精密低功耗仪表放大器[7]实现比较放大器的设计[9],运放的增益由外部电阻R1决定,如图5所示。

图5 比较放大原理电路
增益计算公式由式(3)决定:

旋翼在转速调节器的调节作用下,转速偏差所引起交流电频率的偏差小于±2 Hz,该偏差频率经F/V转换电路,输出直流偏差电压的值小于±0.15 V,经过60 倍的放大处理,作为下一级的PWM 控制信号产生电路的输入信号。
3.5 PWM 控制信号调制电路设计
选择双PWM 控制器UC3637[10]实现PWM 电机控制信号调制电路的设计。其电路如图6所示。
调制电路的输入为旋翼转速偏差信号和速度反馈信号的差,由LM107 构成的减法器电路实现。作动筒电机的速度信号采用电桥网络敏感作动筒电机两端的反电动势,经分压后得到,信号大小与电机的转速成正比。转速偏差信号输入到减法器的正向输入端,电机速度反馈信号输入到减法器的反向输入端,输出信号作为UC3637的调制信号。
作动筒电机的终点限制是通过终点电门控制继电器J的接通和闭合实现的。如图7所示,当作动筒电机未达到终点时,终点限制电门打开,UC3637的14 脚输入−15 V 电压,产生的PWM 电机控制信号正常输出,控制电机动作;当作动筒电机到达终点时,终点限制电门闭合,+15 V 直流电加到UC3637的14 脚,关机控制比较器CS 翻转,输出负信号,使NA、NB关闭,PWM 电机控制信号被屏蔽,电机停转。
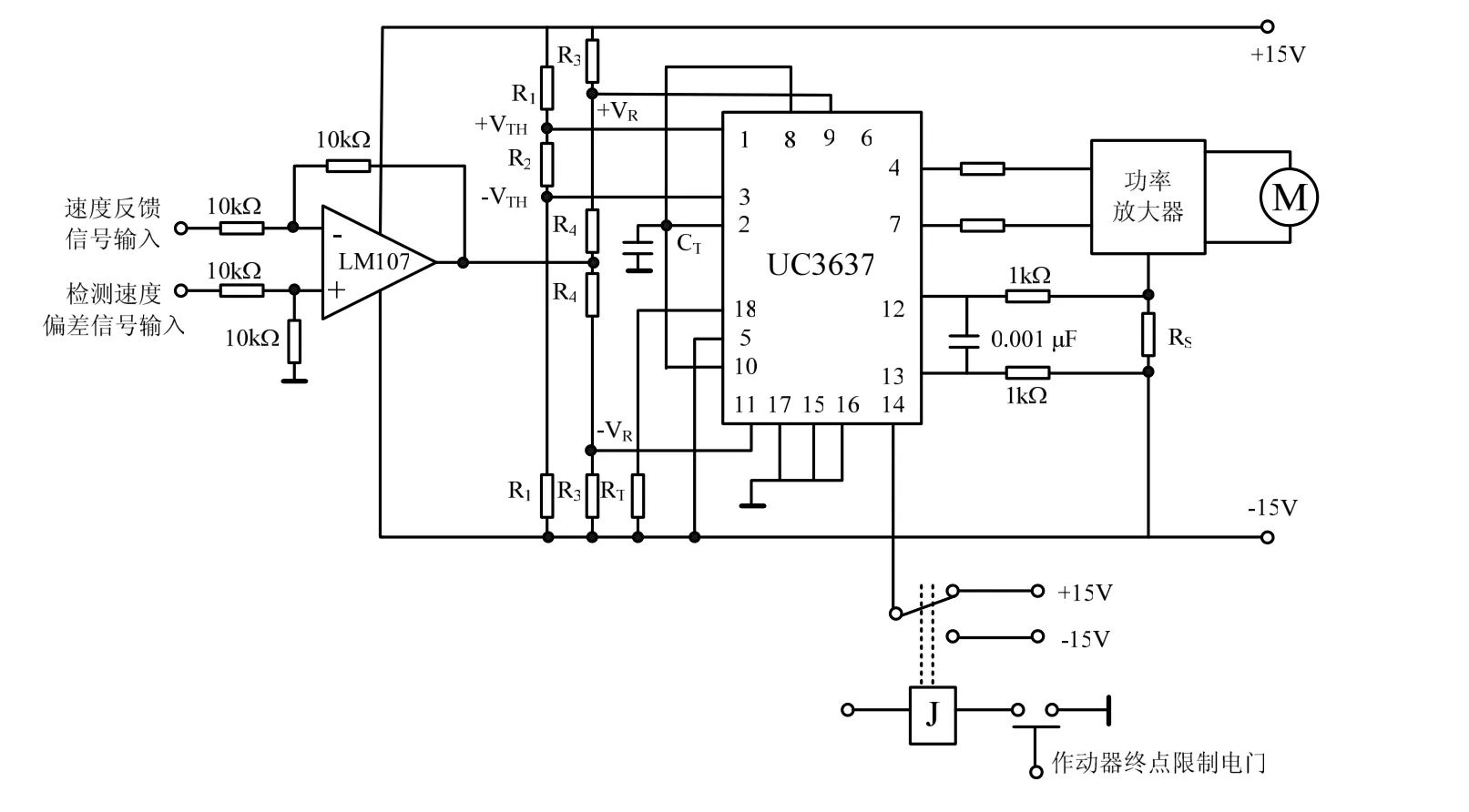
图6 PWM 电机控制信号调制电路
3.6 电机驱动电路设计
选用L298[10]功率驱动芯片实现电机驱动电路的设计,电路如图7所示。该芯片内部包含两个H桥逻辑驱动电路,可以方便的驱动两个直流电机或一个两相步进电机。
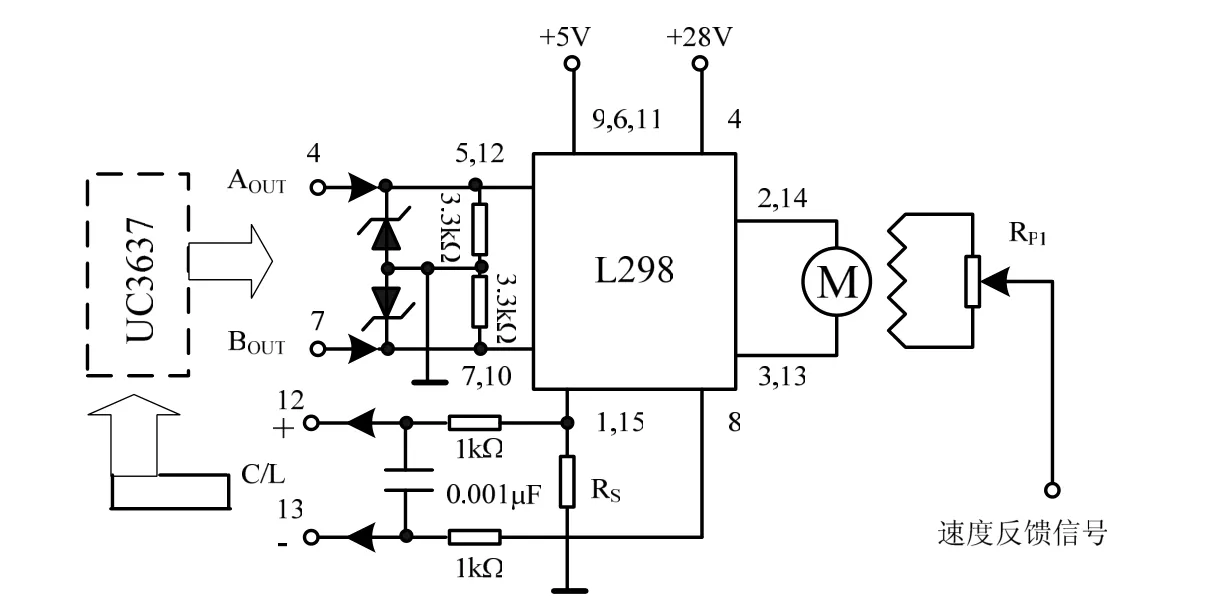
图7 L298 驱动器电路图
为了提高驱动器的驱动能力,将L298 内部的两组桥式电路并联使用,可使其输出电流达到3A。为保证电流在桥路之间分流均匀,输出并联使用时,将桥路1的输出端与桥路4的输出端并联,桥路2的输出端与桥路3的输出端并联。
图7中,电阻RS为电流检测电阻,它将流经的电流信号转换成电压信号,经滤波电路输送到前级控制信号产生器UC3637的限流控制输入端12、13脚,实现对电机的单个脉冲限流保护。RS值可根据电机允许的最大电流计算得到。
上一级PWM 电机控制信号调制电路产生的双路PWM 控制信号,经UC3637的4、7 脚输入到电机驱动芯片L298的双并联输入端(上图中5、12与7、10 引脚)。输入PWM 控制信号根据旋翼转速偏差信号的大小和极性控制电机正转和翻转。L298的1、15 引脚为电流检测端,通过接电流检测电阻RS检测过电流,并将电流值转化为电压信号,经滤波网络输入到UC3637的限流控制端12、13 引脚。当电流过大时,其内部比较器C/L 输出高电平控制SRA与SRB复位至低电平,屏蔽PWM 控制信号的输出,使电机停转,从而实现电机的过电流保护。速度反馈电路经桥式网络感受电机的反电动势,经分压后加到减法器的反向输入端与旋翼转速偏差信号进行综合。当电机转速因负载增加而下降时,电机反电动势下降,速度反馈信号下降,电机控制信号变大,电机加速;当电机转速因负载减小而上升时,反之。从而实现了电机转速与负载大小无关。
3.7 电源电路设计
为保证直升机旋翼转速调节器的正常工作,除了直升机提供的+28 V 外,还需要+15 V、−15 V、+5 V 三种直流电源。设计中选择使用7800 系列固定集成稳压器[11],利用机载28 V 电源变换得到。
4 结论
利用Multisim 10仿真工具对所设计的模块电路进行验证和参数选优,保证转速调节器的调节精度。在此基础上,将上述各模块电路进行交联,可得到基于集成电路设计的旋翼转速调节器总的原理电路,该电路参数经反复计算和调整,保证了信号输出的精度,波形规整,长时间工作稳定可靠,达到稳定旋翼转速的要求。通过直升机的地面对接试验和装机试飞,功能齐全,各项性能指标满足直升机旋翼转速调节系统所提出的性能指标要求,且内部电路信号传递关系简单,便于地面维护人员的校验和维修,可在直升机上推广使用。
[1]李俊,张俊儒.电机控制集成电路的原理和应用[M].北京∶冶金工业出版社,1995∶34-36.
[2]秦继荣,沈安俊.现代直流伺服控制技术及其系统设计[M].北京∶械工业出版社,1993∶2-3.
[3]从宏寿,李绍铭.电子设计自动化—Multisim在电子电路与单片机中的应用[M].北京∶清华大学出版社,2008∶3-79.
[4]龙忠琪.航空电气控制系统[M].西安∶空军工程大学,2002∶84-95.
[5]郭宇飞,姚猛.无刷直流电动机调速的实现[J].电机与控制应用,2009,36(9)∶13-16.
[6]张乐锋,张鼎.运算放大器应用技术手册[K].北京∶人民邮电出版社,2009∶205-207.
[7]PHILLIP E.ALLEN,DOUGLAS R.HOLBERG.CMOS
模拟集成电路设计[M].北京∶电子工业出版社,2005∶214-215.
[8]赵宝经.集成稳压器与非线性模拟集成电路[M].北京∶国防工业出版社,1990∶12-14.
[9]金燕,李如春.模拟集成电路教程[M].北京∶科学出版社,2004∶82-84.
[10]谭建成.电机控制专用集成电路[M].北京∶机械工业出版社,1999∶231-233.
[11]卢建华,邱立军,于进勇.某型飞机电压限定器国产化研制[J].电子技术应用,2007(11)∶64-66.
猜你喜欢
北京航空航天大学学报(2021年9期)2021-11-02
军民两用技术与产品(2021年9期)2021-03-09
电子制作(2019年22期)2020-01-14
电子制作(2019年13期)2020-01-14
电子制作(2019年16期)2019-09-27
电子制作(2019年9期)2019-05-30
电子制作(2019年23期)2019-02-23
宇航计测技术(2018年3期)2018-09-08
北京航空航天大学学报(2016年8期)2016-11-16
汽车与新动力(2015年1期)2015-02-27
