秦山核电一期的棒控棒位系统数字化改造
2011-03-21 07:13:04卜江涛匡红波
核技术 2011年6期
卜江涛 匡红波
(上海核工程研究设计院电气仪控所 上海 200233)
控制棒在反应堆堆芯中的正确移动,由控制棒控制系统(下文简称为棒控系统)完成,这是反应堆正常运行的重要条件。控制棒位置指示系统(下文简称为棒位系统),用于控制棒位置监测,显示对控制棒的要求和实测棒位,并在控制棒位置出现异常时,发出紧急报警信号[1]。
秦山核电一期的30万机组,于1991年建成首次并网发电,其控制棒控制系统和棒位指示系统的设计均为模拟插件,且将接近其使用期。在更换该棒控棒位控制系统时,我们采用数字化技术实现棒控系统的逻辑控制功能,提供触摸屏显示和操作,并改进了棒控系统电源供电回路;棒位指示系统也采用数字化技术处理棒位信号,提供触摸屏监测和显示。新棒控棒位系统的外部接口保持不变。
1 棒控系统改进
1.1 棒控系统“一带一”控制方式
秦山核电一期棒控系统的原设计为“一带四”控制方式,即一个主电路向一个控制棒组的驱动机构提供控制电流(最大四束,即一带四),该设计的设备利用率高,但对驱动机构线圈的电气参数一致性要求较高,若该控制棒组各驱动机构线圈的电流不一致,会影响驱动机构的性能和使用寿命,也给控制系统的控制和调试带来困难。鉴此,将该棒控系统改为“一带一”控制方式,即每一驱动机构各有一个主电路,37束控制棒共对应37个主电路,每个主电路包括3个供电回路,即提升线圈供电回路、可动钩爪线圈供电回路和固定钩爪线圈供电回路。每个供电回路由三相半波晶闸管整流电路(包括移相触发器)及电流调节回路组成。
此控制方式增加了控制的灵活性,降低了对驱动机构线圈参数一致性的要求,但增加了设备数量,为使现有棒控间能容纳这些控制设备,采用结构紧凑的双联柜。改造后的棒控系统由2个逻辑柜(逻辑柜A、逻辑柜B)、10个电源柜(9个双联柜和1个单柜)、1个数据采集柜组成[2](该机柜用于驱动机构线圈电流波形的采集和落棒试验)。
1.2 棒控系统数字化设计
棒控系统从功能上可分为主循环逻辑、从动循环逻辑和供电回路。主循环逻辑接收外系统提供的控制信号(如来自主控室的手动控制命令和来自功率调节系统的自动控制命令),对其进行综合处理,向指定的控制棒组发送移动一步的启动命令(同组控制棒的不同子组间相差半步)和方向命令。从动循环逻辑接收主循环逻辑的启动信号后按照要求的方向产生控制棒移动一步所需的电流时序信号,并送往供电回路中的电流调节回路。电流调节回路将信号转换成电压定值,与来自驱动机构线圈中的反馈电压信号进行比较控制,由晶闸管的导通时间,调节驱动机构中线圈的电流,使其满足移动时的电流要求,从而实现控制棒的移动[3]。
主循环逻辑和从动循环逻辑的功能由数字控制器实现,采用美国 Rockwell Automation公司Allen-Bradley品牌下的ControlLogix系列PLC控制器[4],该设备具有很高的可靠性。
主循环逻辑采用一个带冗余功能的主循环控制器实现[5],该控制器位于逻辑柜中。每个子组采用一个从动循环控制器,从动循环控制器位于电源柜中。主循环控制器和从动循环控制器之间的通信采用星型连接方式;主循环逻辑控制器仅需向从动循环控制器输送子组选择信号和移动启动信号及方向信号。此配置大大减少了主循环控制器通过通信向从动循环控制器的发送的信号数量(70−80)。通信延迟会造成从动循环控制器接收信号的延迟,控制棒移动速度要求为6−60步/min[2],则最快的移动启动信号为1次/s,但本设计的从动循环控制器接收控制信号的最大延迟时间<10 ms。启动信号的延迟仅影响控制棒开始移动的时间,并不影响控制棒的移动时序,且10 ms的延迟远小于500 ms,也满足同组控制棒中不同子组间相差不能超过一步的要求。电源柜中的从动循环器接收到启动命令和方向信号后,产生控制棒在指定方向上移动一步所需的时序信号,由于每个从动循环控制器只向本子组发送时序信号,信号量大大减少,同时通过本机箱上的输出模块直接发送,完全满足系统对时间的要求。PLC配置方案如图1所示。
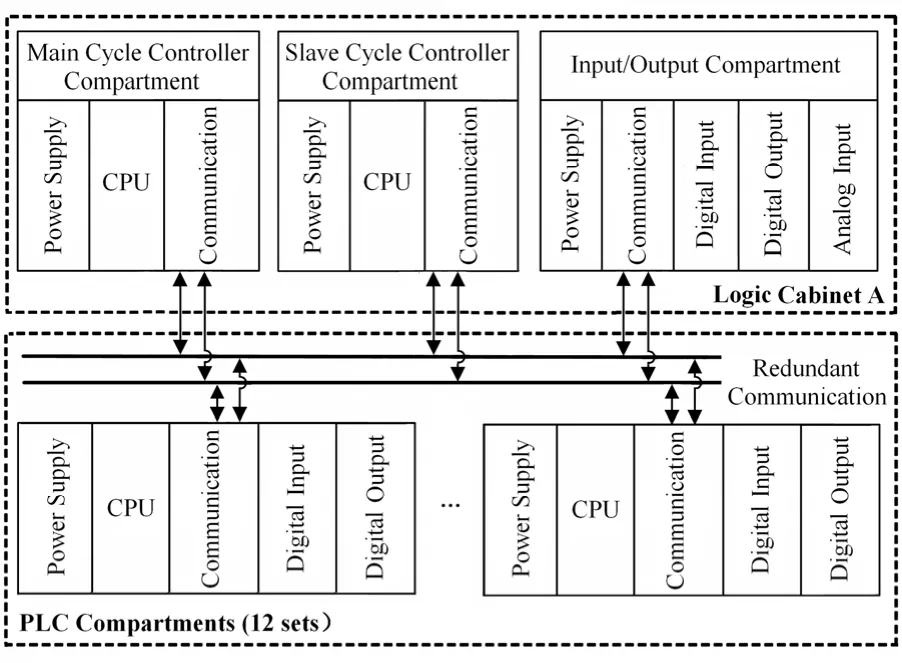
图1 棒控系统PLC配置图Fig.1 PLC controller configuration for the new rod control system.
I/O机箱用于连接控制棒控制系统与外系统之间的信号(如主控室的控制和显示);触摸屏的操作界面可显示棒控系统的运行状态,包括自动、手动、方向、要求棒位与故障状态。故障状态还可通过界面导航定位到系统的某个设备,调试时,可通过操作界面进行控制和调节参数,为操作和维修提供便利。逻辑柜B由显示器、工控机和打印机组成,工控机用于数据的存储及PLC控制程序的编辑、下载以及在线调试。电源柜由PLC机箱、电流调节电路及晶闸管整流回路(电流调节电路及晶闸管整流回路组成电源供电回路,具体描述见电源供电回路设计部分)组成。逻辑柜冗余控制器与触摸屏、工控机、电源柜PLC控制器、棒位指示系统中的PLC控制器之间通过冗余的Controlnet进行通信。
1.3 棒控系统电源供电回路设计
1.3.1 电源供电回路的设计改进
电源供电回路主要实现对驱动机构线圈电流的控制(图 2),由电流调节回路和晶闸管整流回路组成,每个控制棒驱动机构有三套电流调节回路和晶闸管整流回路,分别向驱动机构的提升线圈、可动钩爪线圈和固定钩爪线圈提供所需电流。电源供电回路的原理如图3所示,我们把完成提升线圈电流调节回路的模拟插件所在的机箱称为提升机箱,同样还有动钩机箱和定钩机箱。由图 3,定值模块接收来自PLC输出接口的控制命令后,转换成相应的电压定值,调节模块接收该电压定值并与来自霍尔传感器的电压信号进行比较和调节,最终通过移相触发模块控制晶闸管的导通时间来控制棒电源流经驱动机构线圈电流的大小。该部分系强电控制,且采用反馈的控制方式,需对反馈电压进行采集,不适合采用PLC完成,故仍采用模拟插件方式完成相关功能。
1.3.2 电源供电回路与PLC接口电路设计
控制棒控制系统的主循环逻辑和从动循环逻辑都采用PLC实现,主循环控制器和通信采用冗余的配置方式,但I/O模块为非冗余配置。考虑到输出模块故障模式为低电平模式,设计时对定钩线圈和动钩线圈控制时序信号输出端采用低电平有效的控制方式,当对应于定钩大电流或动钩大电流/小电流命令的输出模块出现故障而处于低电平状态时,电源供电回路仍能使固定钩爪线圈和可动钩爪线圈处于通电状态,从而避免输出模块故障时引起控制棒落棒事故。此外,控制电路还接收从动循环控制器的PLC紧急故障信号,该信号同样采用低电平有效的控制方式,当该信号存在时自动闭锁控制棒的移动。
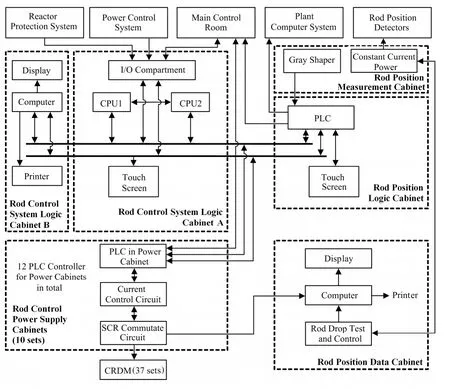
图2 改造后的棒控棒位系统结构框图Fig.2 Block diagram for the new rod control and rod position systems at Qinshan NPP.
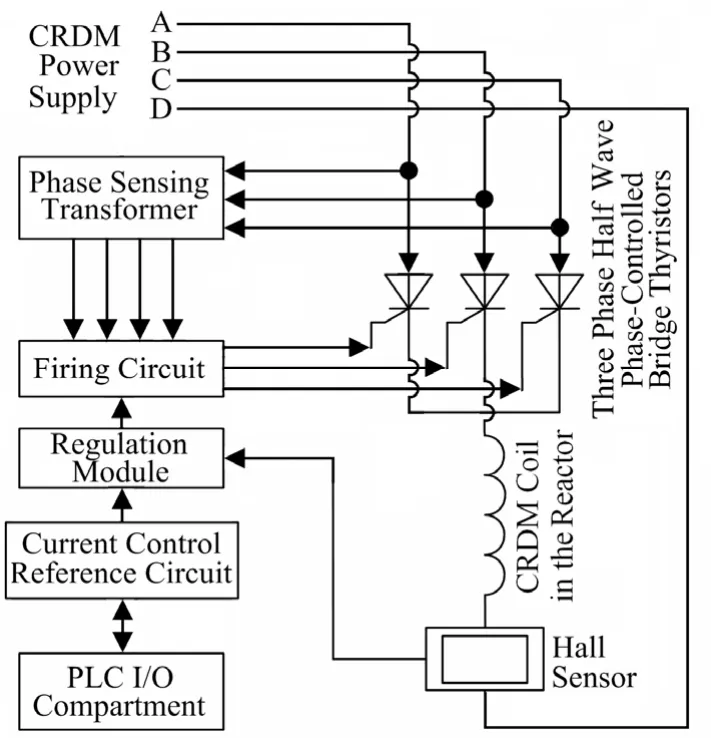
图3 电源供电回路原理图Fig.3 Schematics of the power supply circuit.
1.3.3 故障报警功能及故障响应功能改进
由图1,逻辑柜中的主循环PLC控制器采用冗余的配置方式:控制器1和控制器2。控制器2监测到控制器1出现故障时,自动切换到运行状态,并给出报警。控制器切换不会造成控制棒移动故障。同时逻辑柜中的控制器还对电源柜中的 PLC控制器的工作状态进行监测,电源柜控制器出现故障时,逻辑柜中的控制器发出故障报警信号,同时电源柜的输出置于故障模式,使控制棒处于双保持状态。
在电源回路中设置各种检测电路来探测回路的故障,发生故障时采取必要的补救措施,以防止落棒事故。电源供电回路紧急故障有[2]:(1) 驱动机构提升线圈、固定钩爪线圈、可动钩爪线圈电流过大或大电流通电时间过长;(2)同一棒束的固定钩爪线圈电流和可动钩爪线圈电流同时为零;(3) 三相整流电路缺相;(4) 功能插件离线。
发生紧急故障后,棒控系统自动产生如下响应:(1) 供电回路对故障信号进行综合处理后本地发出声光报警,同时送往PLC控制器进行处理后向主控室发出紧急报警信号。(2) 禁止控制棒的自动控制功能,系统进入手动操作方式。(3) 电源供电回路自动切断紧急故障电源柜中提升线圈供电回路的输出,并迅速对固定钩爪线圈和可动钩爪线圈通以先大后小的电流信号,直至故障被排除,即称“双保持电路”。
故障时触发双保持电路的控制信号采用多样化的方式:一个信号来自于PLC控制器。电源机箱的紧急故障经PLC处理后,向主控室发送报警信号,同时控制器向供电控制回路发出 PLC紧急故障信号,电源供电控制回路接收到该信号后,动钩线圈和定钩线圈产生先大后小的保持电流。
考虑到机箱出现故障至 PLC发出紧急故障之间的时间延迟,机箱故障信号送往PLC处理时,也送往电源供电控制回路的定值插件,如动钩机箱故障和定钩机箱故障送往提升机箱的定值插件,倘若前两个机箱均发生故障,自动闭锁提升定值插件中提升电流命令信号。在定钩定值插件中,提升机箱故障和动钩机箱故障将闭锁来自 PLC的定钩电流命令信号,同时将触发定钩定值产生先大后小的电流命令,用于控制棒的保持。同理,若提升机箱或定钩机箱发生故障,动钩机箱中的动钩定值插件屏蔽来自PLC的动钩控制命令信号,并让触发动钩定值产生先大后小的电流命令,用于控制棒保持。这样,大大缩短了机箱故障的响应时间,同时也向PLC传送了故障信号。
1.4 数据采集柜的设计
由图 2,棒控棒位系统中增设数据采集柜,由工控机、采集卡、显示器和存储器等组成,功能如下:(1) 37束控制棒驱动机构的线圈波形的在线采集和保存;(2) 配合控制棒落棒时间的测量。
该数据采集柜采集并存储 37束控制棒的驱动机构线圈的电流波形。其设计主要考虑两个因素:采集速度和存储容量。由于驱动机构线圈的电流由50 Hz的三相棒电源经半波晶闸管整流后形成的电流纹波频率为150 Hz,通过波形确认故障原因,要求采样频率>1 ms /次,并有较高的采集速度。此外,设计中要求数据采集柜的存储容量满足所有控制棒运行3天的数据存储要求。
数据处理柜的另一功能为配合棒位系统的恒流源机柜进行落棒试验,完成落棒试验的驱动控制(指驱动棒位探测器的初级线圈切换功能)和落棒时间的数据采集功能。
2 棒位指示系统的设计改进
棒位指示系统采集和处理棒位探测器信号,并对棒位信号进行报警功能的处理。棒位指示系统设备由棒位测量柜和棒位处理柜组成(图2)。棒位测量柜中的恒流源插件向棒位探测器的初级线圈提供初级电流,并在落棒试验时配合棒控系统的数据采集柜完成落棒试验。葛莱码(GRAY CODE)整形模块采集37个棒位探测器的六位葛莱码信号,并对其进行整理和初步处理后送往棒位系统处理柜。棒位处理柜中的PLC接收来自葛莱码整形模块37束控制棒的葛莱码信号,将其转换成实测棒位信号,还通过通信方式从棒控系统中获得要求棒位信号。此外,棒位PLC还需完成失步报警功能,对控制棒的棒失步、组失步、棒离顶、落棒以及棒位装置故障进行监测。棒位指示系统也采用AB公司的PLC完成。控制棒控制系统和棒位指示系统间通过通信方式连接,取消了棒控系统和棒位系统之间的大量电缆。通信光纤采用冗余的配置方式,保证了系统之间通信的可用性。
3 结语
该棒控棒位系统特点如下:
1) 采用一带一控制方式,控制灵活可靠,改进机柜结构使控制机柜能置于原来棒控间内。
2) 采用 PLC实现棒控棒位系统的逻辑控制和数据处理等功能,PLC可靠性高,编程方式方便控制程序的修改和调试;直观的操作界面,便于操作员观察和调试;控制棒控制系统的处理器部分和通信部分采用冗余配置,提高了系统的可靠性;在PLC编程中考虑了各种故障可能性及故障保障措施。
3) 改进了电源供电控制回路的插件电路,设计时考虑了 PLC输出接口故障及各控制回路故障时的保障措施,当系统发生单一故障时,控制棒不会发生落棒事故。
4) 棒控系统采用数据处理柜,对驱动机构线圈电流进行采集和保存,用于驱动机构故障分析。
5) 棒控棒位系统间的信号采用通信方式传输,减少了两系统间的大量电缆,冗余的配置方式保证了系统间通信的可靠性。
该系统自2008年1月投入使用以来运行良好。
1 杜圣华. 核电站[M]. 北京:原子能出版社, 1958
DU Shenghua. Nuclear power plant[M]. Beijing: Atomic Energy Publisher, 1958
2 曹梅新. 长棒控制装置、控制棒位置指示装置说明书[Z]. 上海核工程研究设计院, 2006, Revision A
CAO Meixin. System manual for control rod control system and control rod position indication system[Z]. Shanghai Nuclear Engineering Research and Design Institute, 2006, Revision A
3 卜江涛. 棒控棒位系统设备柜技术规范书[Z]. 上海核工程研究设计院, 2005, Revision B
BU Jiangtao. Technical specification for control rod control system and control rod position indication system[Z]. Shanghai Nuclear Engineering Research and Design Institute, 2005, Revision B
4 ControlLogix System User Manual, Rockwell Automation 2006
5 ControlLogix Redundancy System User Manual, Rockwell Automation, 2006
猜你喜欢
大电机技术(2022年4期)2022-08-30 01:38:30
中国特种设备安全(2021年5期)2021-11-06 05:09:26
核科学与工程(2021年2期)2021-05-18 10:38:46
现代应用物理(2021年1期)2021-04-16 05:36:54
模具制造(2019年7期)2019-09-25 07:29:58
设备管理与维修(2016年6期)2016-03-16 02:22:08
核科学与工程(2015年1期)2015-09-08 13:24:35
电脑迷(2015年2期)2015-04-29 00:44:03
汽车维护与修理(2015年6期)2015-02-28 12:17:05
电子测试(2012年10期)2012-03-31 12:14:20