基于GPU并行计算实现快速显微CT重构
2011-03-21 07:13:02陈荣昌肖体乔
核技术 2011年6期
沈 飞 陈荣昌 肖体乔
1 (中国科学院上海应用物理研究所 上海 201800)
2 (中国科学院研究生院 北京 100049)
近些年来,三维CT在医学和工业领域得到广泛应用。随着探测器分辨率的改进,CT投影图像采样分辨率也不断提高,对高质量输出容积体期望值的不断提升,使存储容量和数据的处理量越来越大,严重影响CT重建速度。目前,上海光源成像线站采用串行的 CT重建程序并通过 CPU完成计算,计算数据容积为2 048×2 048×1 500,就需40多小时,迫切需要进行CT重建的加速。
图像处理器(GPU, graphics processing unit)是高度并行化的流式处理器,并行计算能力强,运算速度快,在通用计算(GPGPU)领域有极大优势。文献[1]利用 GPU 实现 FDK 算法(The algorithm of Feldkamp, Davis and Kress)的加速,最高可达15倍左右的加速比。Scherl[2]利用 CUDA在 NVDIA Geforce8800实现了FDK算法,取得5倍左右的加速比。
使用FDK算法和迭代算法进行CT重建的GPU加速研究,已取得较佳效果[3−5]。而基于滤波反投影算法的GPU加速的研究并不多见,该法的主要优点是重建速度快。本文采用滤波反投影(FBP)算法实现CT重建,由于反投影时每个位置的像素值重建相互独立,可同时进行重建计算,故可将其并行化设计。
1 GPU并行化实现CT重建
1.1 CUDA编程模型
CUDA编程模型[6]将CPU作为主机(Host),GPU作为协处理器(co-processor)或设备(Device)。一个系统中可存在一个主机和若干个设备,采用单指令、多线程执行模式(SIMT)。
模型中CPU和GPU协同工作,各司其职。CPU负责进行逻辑性强的事务处理和串行计算,GPU则专注于执行高度线程化的并行处理任务。CPU和GPU各自拥有相互独立的存储器地址空间:主机端的内存和设备端的显存。
一旦确定了程序中的并行部分,即可考虑把这部分计算工作交给GPU。将运行在GPU上的并行计算函数称为kernel(内核函数)。一个kernel函数并不是一个完整的程序,而是整个CUDA程序中一个可被并行执行的步骤(图1)。一个完整的CUDA程序,是由一系列设备端kernel函数并行步骤和主机端串行处理步骤共同组成。这些处理步骤会按照程序中的相应语句顺序依次执行,满足顺序一致性。
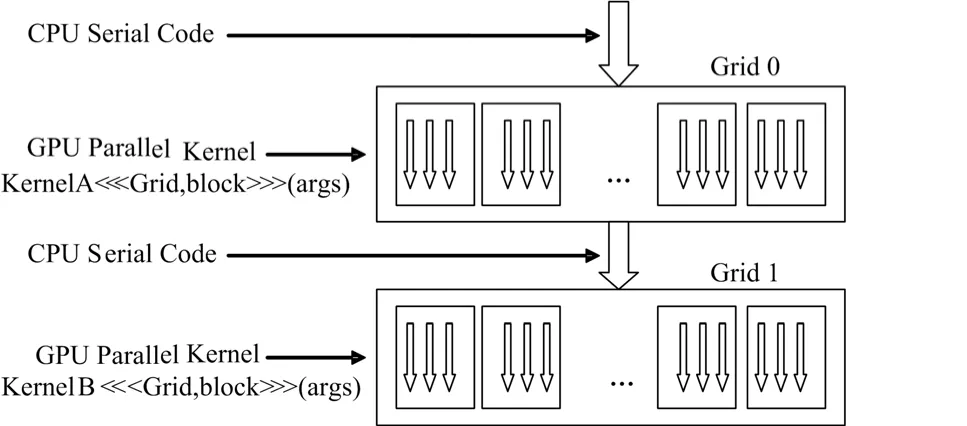
图1 CUDA编程模型Fig.1 Programming model of CUDA.
进行GPU代码设计时,对全局现存的访问是否符合合并访问条件是对 CUDA程序性能影响最明显的因素之一,可能产生一个量级的差距。因为,若符合一定的访问条件,只需一次传输即可完成一个Half-warp所有线程的数据访问[6]。
1.2 CT重建kernel的设计
滤波反投影重建是一种解析方法,先获取某一层所有角度的投影数据得到正弦图,再进行滤波降噪处理,最后进行反投影重建得到断层每个位置的像素值,其优点是重建速度快[7]。
1.2.1 正弦图
滤波反投影前,需获取重建切片的正弦图,由于直接获取的正弦图含有背景噪声,需去除之,我们采用的方法如式(1):

式中,Pi(x,y)为第 i层切片(x,y)处的像素值,D(x,i)为无光照时第 i层切片(x,i)处的像素值,F(x,i)为有光照无样品时第i层切片(x,i)处的像素值。
由式(1),每个坐标处的计算互不相干,可并行执行,则可在CPU代码中获取正弦图数据,并编写kernel函数去除背景噪声,可见kernel执行过程的数据访问符合合并访问的条件。
1.2.2 滤波处理
由于滤波反投影算法会带来星状伪迹,故需进行滤波消除伪迹。本文采用Sheep Logan滤波函数进行滤波处理,用滤波函数重建图像,其振荡响应减小,对于含有噪声的投影数据,重建效果较好[8],其函数式为:

式中,n为取值范围(−width/2,width/2),width为图像的宽度;d取1。其图形如图2所示。
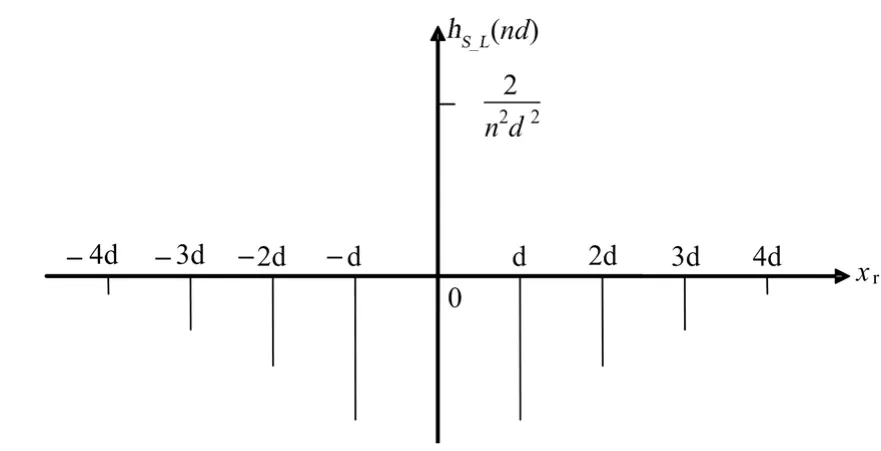
图2 S_L滤波函数的离散表示Fig.2 Discrete representation of S_L filter function.
将图像函数和滤波函数进行卷积操作,即:

由于CUDA有FFT和IFFT的API,本文采用傅里叶变换方式求卷积,滤波函数的取值范围和图像的宽度相一致。傅里叶变换后求乘积即位置相对应的点相乘,可将其并行化处理,而且两个函数的宽度一样,所以kernel在执行时其数据访问符合合并访问的条件。
1.2.3 反投影
CT重建的计算量主要在反投影部分,反投影部分的加速效果直接影响重建过程的加速比。反投影过程即为累加求和的过程,在进行累加求和前需进行射束计算和线性内插。图像重建时指定切片的像素为N×N,如图(3)所示。
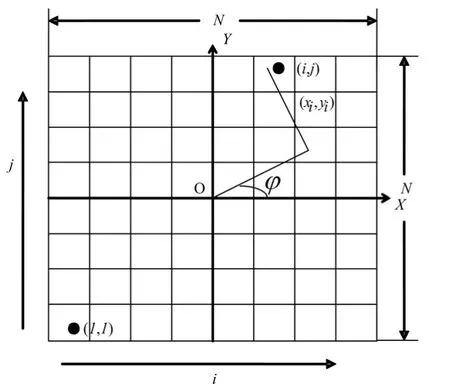
图3 图像重建时所用的坐标系Fig.3 Coordinate system of image reconstruction.
滤波反投影公式为:

由式 4,图像重建时每个点的重建互不干扰,且每个点重建的方法相同,只是重建时所需的数据不一样。所以,单个切片的每个坐标处的重建是可以并行执行的。
由于重建时数据的访问不符合合并访问的条件,带有随机性,所以采用将数据映射到纹理存储器。纹理存储器通过缓存利用数据的局部性提高效率,使用纹理时未严格遵守合并访问条件,也能获得较高的带宽[6,8]。
2 实验结果与分析
实验平台的配置为:中央处理器Intel i5-650,图形处理器NVIDIA GTX295,内存Kingston DDR3 4GB,操作系统Windows XP Professional SP2 X86,显卡驱动NV driver 190.20 + CUDA 2.3 SDK。
开发工具为 Visual Studio2005,主机端使用C++进行编程,设备端采用CUDA标准的类C语言进行编程。
我们在CPU中进行CT重建时,采用单精度浮点型数据进行保存,而GPU支持双精度浮点运算,其重建结果符合实验要求(图4)。

图4 CPU和GPU重建结果的比较Fig.4 Comparison of reconstruction between CPU and GPU.
由于GTX295拥有30个流多处理器(SM),而每个SM中拥有8个SIMD的流处理器(SP),总计算核心达 240个。实验中对尺寸为 704×301×1 200的数据进行了重建的加速(704和301是图像的高度与宽度,1 200是投影数),其中对单张切片的正弦图处理、滤波、反投影部分采用GPU加速后的时间进行了比较,结果见表1。
由表1,除去数据传输的延时,使用GPU加速,其正弦图处理和滤波部分可得到200倍以上的加速比,而在反投影部分,将数据映射到纹理存储器中,其加速比增加一个量级。本实验还对尺寸为1 016× 1 016×1 620和2 048×2 048×1 500的物体进行重建加速的比较,计算部分的加速比都在150倍以上。

表1 某一层数据重建的时间(物体尺寸:704×301, 投影数:1 200)Table 1 Reconstruction time of a slice(object size, 704×301; projection number, 1 200).
随着数据量的不断增加,CPU读取硬盘数据及CPU内存与GPU显存之间数据传输的时间不断增加。对不同容积的数据,读取硬盘数据和 CPU与 GPU间数据传输并将数据写存到硬盘的总时间见图5(a);图像重建的加速比见图5(b)。
由图5(b),当重建的数据大小达到一定程度时,其整体的加速比会降低,这是因为当数据量增至一定程度,其计算部分的加速比达到饱和,而此时CPU的内存和GPU的显存之间以及CPU内存和硬盘之间数据传输的时间随着数据尺寸而增大,从而使整体的加速比降低。

图5 不同容积的数据传输时间(a)和加速比(b)的比较Fig.5 Comparison of different data sizes in transmission time (a) and speedup ratio (b).
3 结语
本文研究了通过 GPU加速使用滤波反投影原理的CT重建方法,得到了比较理想的结果。实验表明,支持单精度的GPU重建图像质量完全符合要求,其单张切片的重建可得到150多倍的加速比。GPU强大的计算能力可用于快速CT重构,是一种性价比较高的重构算法。若采用多GPU进行CT重建的加速,则加速比更高,甚至直接用于实时 CT重构。
1 FANG Xu. Real-time 3D computed tomographic reconstruction using commodity graphics hardware[J]. Phys Med Biol, 2007, 52(12): 3405–3419
2 Scherl H. Fast GPU-based CT reconstruction using the Common Unified Device Architecture (CUDA)[Z]. IEEE Nucl Sci Symp, Med Imaging Conf, 2007, (6): 4464–4466
3 Mueller K, Yagel R. Rapid 3-D cone-beam reconstruction with the Simultaneous Algebrmc Reconstruction Technique(SART) using 2-D texture mapping hardware[J]. IEEE Trans Med Imag, 2000, 19(12): 1227–1237
4 Sharp G C. GPU-based streaming architectures for fast cone-beam CT image reconstruction and demons deformable registration[J]. Phys Med Biol, 2007, 52(19): 5771–5783
5 胡君杰. 利用 GPU实现三维图像重建方法研究[J]. 世界科技研究与发展,2008, 30(1): 24–26
HU Junjie. The research of 3-D image reconstruction in GPU[J]. Res Dev world, 2008, 30(1): 24–26
6 张 舒. GPU高性能运算之CUDA[M]. 北京: 中国水利水电出版社,2009: 16–168
ZHANG Shu. High performance computing of GPU–CUDA[M]. Beijing: China Water Power Press, 2009: 16–168
7 庄天戈. CT原理与算法[M]. 上海: 上海交通大学出版社,1992: 30–60
ZHANG Tiange. The principle and algorithm of CT[M]. Shanghai: Shanghai Jiaotong University Press, 1992: 30–60
8 马车平. GPU多重纹理加速三维ct图像重建[J]. 计算机工程与应用,2008, 44(7): 227–230
MA Cheping. Accelerating the 3-D CT image reconstruction with multiple texture of GPU[J]. Comput Eng Appl, 2008, 44(7): 227–230
猜你喜欢
中学生数理化·高一版(2023年3期)2023-03-23 01:34:42
新高考·高三数学(2022年3期)2022-04-28 08:41:42
当代陕西(2019年13期)2019-08-20 03:54:22
中学生数理化·高一版(2018年6期)2018-07-09 06:00:56
电信科学(2016年11期)2016-11-23 05:07:58
中国组织化学与细胞化学杂志(2016年3期)2016-02-27 11:15:40
电测与仪表(2015年16期)2015-04-12 00:44:26
中国当代医药(2015年17期)2015-03-01 02:03:38
测绘科学与工程(2014年5期)2014-02-27 07:06:14
河北医科大学学报(2010年10期)2010-03-25 10:15:06