飞轮储能系统建模与仿真研究
2011-03-20 02:23:44杨锋于飞张晓锋贺慧英
船电技术 2011年4期
杨锋 于飞 张晓锋 贺慧英
(海军工程大学电气与信息工程学院, 武汉 430033)
1 引言
飞轮储能系统是一种以动能方式存储能量的机械电池,它由高速飞轮、电动/发电机、轴承支承系统、功率电子变换器、电子控制设备以及附加设备(如真空泵、紧急备用轴承)等组成[1]。飞轮电池在“充电”时,利用现代功率电子技术,由工频电网提供的电能,经功率电子变换器,驱动电机带动飞轮高速旋转,飞轮以动能的形式把能量储存起来,从而完成电能—机械能转换的储存能量过程。当需要给负载供电,即“放电”时,高速旋转的飞轮作为原动机拖动电机发电,经功率变换器输出适用于负载的电流与电压,从而完成机械能—电能转换的释放能量过程。
整个飞轮储能系统实现了电能的输入、储存和输出的全过程。正因为这个技术特点,目前国外将飞轮储能用于不间断电源[2]、电力系统调峰[3]、风力发电、太阳能发电、电动汽车[4]、低轨道卫星、大功率调峰等方面[5]。在舰船上,飞轮储能系统同样可以作为不间断电源使用,即当舰艇发电系统出现故障时,由飞轮储能系统释放能量,为重要负载提供持续电源。
在舰船等独立电力系统为高能武备大功率脉冲负载供电时,为避免对电源瞬时冲击过大,必须采用储能系统,采用飞轮储能系统是一种有效途径。但是,根据独立电力系统容量小,负载大小与系统容量具有可比性等特点,需要根据不同负载大小来选择飞轮储能系统匹配,并且分析飞轮储能系统在储能状态、放能状态及两者之间的转换过渡时刻,对负载的影响和带来的供电电能品质问题。为此,必须建立合适的飞轮储能系统的全系统模型进行仿真分析。
2 飞轮储能系统
典型的飞轮储能系统的工作原理图如图1所示。当飞轮系统处于充电状态时,PWM变流器1起整流作用,主要将工频交流电整流为恒定电压的直流电;PWM变流器 2起逆变作用,将直流电源经过脉宽调制变为频率可变及电压大小也可变的交流电,驱动电机带动飞轮高速旋转,电机工作在电动状态,把电能转化为飞轮动能存储起来。
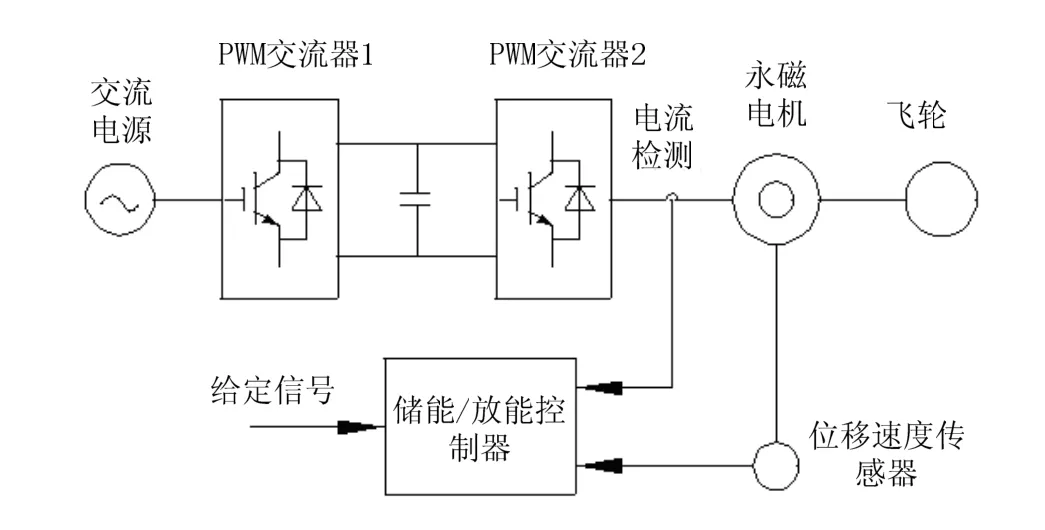
图1 飞轮储能系统的工作原理图
当需要飞轮提供能量时,飞轮电池工作于放电状态,飞轮充当原动机,电机工作在发电状态,PWM变流器 2起整流作用,将发电机发出的交流电整流为直流电,PWM变流器1起逆变作用,将直流电源经过脉宽调制变为频率及电压大小恒定的工频交流电供给用电设备。
储能/放能控制器的作用是在储能或放能时,采用不同的控制方法,控制主电路半导体元件的开通和关断,完成脉宽调制,使逆变器输出电压符合需要的频率大小和波形,满足飞轮加速(储能)或减速(放能)的需要。
3 飞轮储能系统的仿真模型
由于数值计算技术和计算机技术的发展,基于图形的模块化仿真方法已经成为电力系统仿真的主导方向,为电力系统数字仿真提供了非常强大的工具。PSCAD/EMTDC计算软件是其中比较典型的代表。
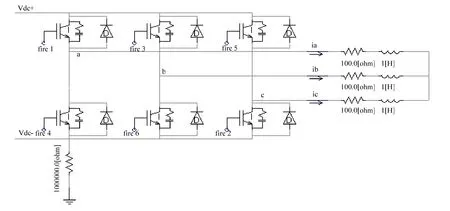
图2 三相PWM变流器仿真模型
PSCAD/EMTDC是专业用于电力系统电磁暂态计算的图形化仿真工具,其中集成了包括发电机、电动机负荷、输电线路、变压器以及电力电子器件与装置在内的电力系统绝大多数元件的详细时域模型,并提供用户自定义模型接口。可用于进行一定规模的交直流电力系统详细时域电磁暂态仿真。由于考虑本飞轮储能系统应用于独立电力系统中,需充分考虑其储能和放能的动态过程,故采用了PSCAD/EMTDC软件搭建其仿真模型。
飞轮储能系统仿真模型按照图1的工作原理框图而建立,其中两个PWM变流器建立的模型如下:
三相逆变器是由六个全控型器件构成。另外为了给负载能量回馈提供通路,每个全控器件都要反并联一个二极管,模型中的全控器件采用IGBT,由软件自带。该模型可以对器件的吸收电路进行设置。建立的仿真模型主电路如图2所示。
为减小输出电压的谐波,逆变器一般采用PWM 控制方式,本模型采用的是正弦 PWM(SPWM)控制方式,即逆变器的触发信号由正弦参考波与三角载波相比较获得,逆变器输出电压的幅值与频率由参考波确定,逆变器的开关频率由三角波确定,触发控制电路的仿真模型由图3所示。
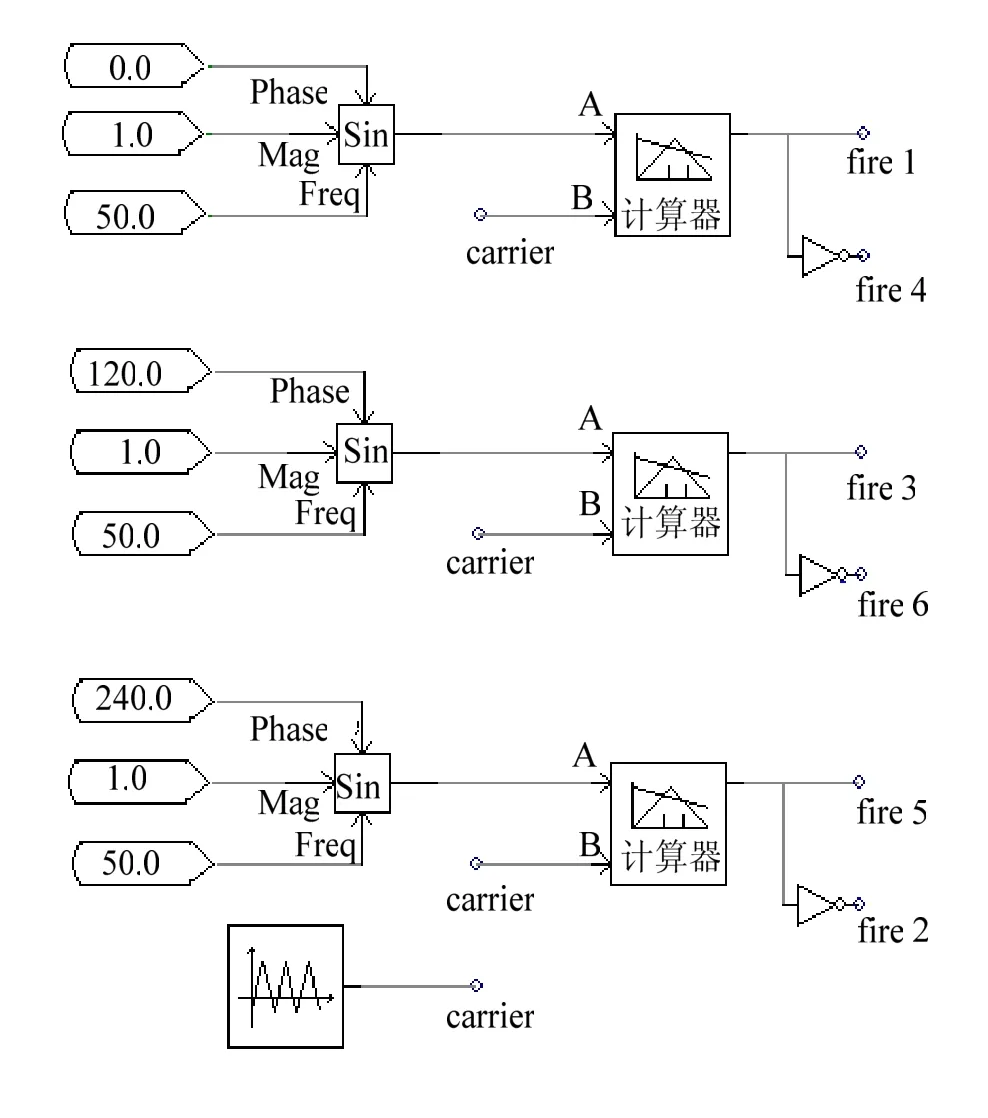
图3 三相PWM变流器触发控制信号仿真模型
飞轮储能系统中永磁电机采用软件自带模型,由于飞轮与电机同轴,且一般采用磁悬浮技术减小其摩擦阻力,因此飞轮转子可以采用具有大转动惯量、小摩擦系数和小阻力转矩的负载模拟。
永磁电机在储能阶段作为电动机运行,采用矢量控制技术,其中在电机额定转速以下,采用恒转矩加速模式,在额定转速以上采用恒功率加速模式。为此需要断开变流器1的控制信号使其由反并联二极管工作在整流状态,变流器2工作在逆变状态,控制信号按照电机的加速控制要求给定。
永磁电机在放能阶段作为发电机由飞轮作为原动机带动其运行,变流器2的控制信号封锁,由其反并联二极管工作在整流状态;变流器1工作在逆变状态,采用负反馈方式根据负载要求提供三相交流电源。
4 仿真结果及验证
设置交流电源电压为50 Hz、3300 V;电机转速给定为4000 r/min;飞轮负载转矩为2 N·m,转动惯量为50 kg·m2;系统在t=100 s时由储能状态转换到放能状态,释放的电能提供给50 kW的恒功率负载,要求输出给负载的电压为400 V,为降低输出电压谐波,在PWM变流器1的交流输出侧侧接三相 LC滤波器,直流输出侧接大电容滤波。
(注:实际系统的转速和转动惯量要大很多,因此系统加速时间将非常长,为缩短仿真时间,这里转速和转动惯量设置较小,但是并不影响对仿真模型的验证。)
得到的仿真结果如图4所示。
从仿真结果可以看出:
(1) 永磁电机在0~5 s工作在电动机状态,电机转速按控制要求加速;
(2) 在t=0~1.2 s之间,在矢量控制技术下,电机采用恒转矩加速方式,电机始终控制在最大转矩下,电机电流也一直保持在最大值,因此转速加速度较快;
(3) 在t=1.2 s时,电机转速和反电势达到额定值,不能再提供最大输出电流,因此控制电机工作在恒功率加速方式下,在该方式下,随电机的转速不断升高,电机的电磁转矩和电枢电流不断减小,保持输出功率在额定功率不变,由于电磁转矩和电枢电流不断减小,因此在该阶段电机的加速度不断减小;
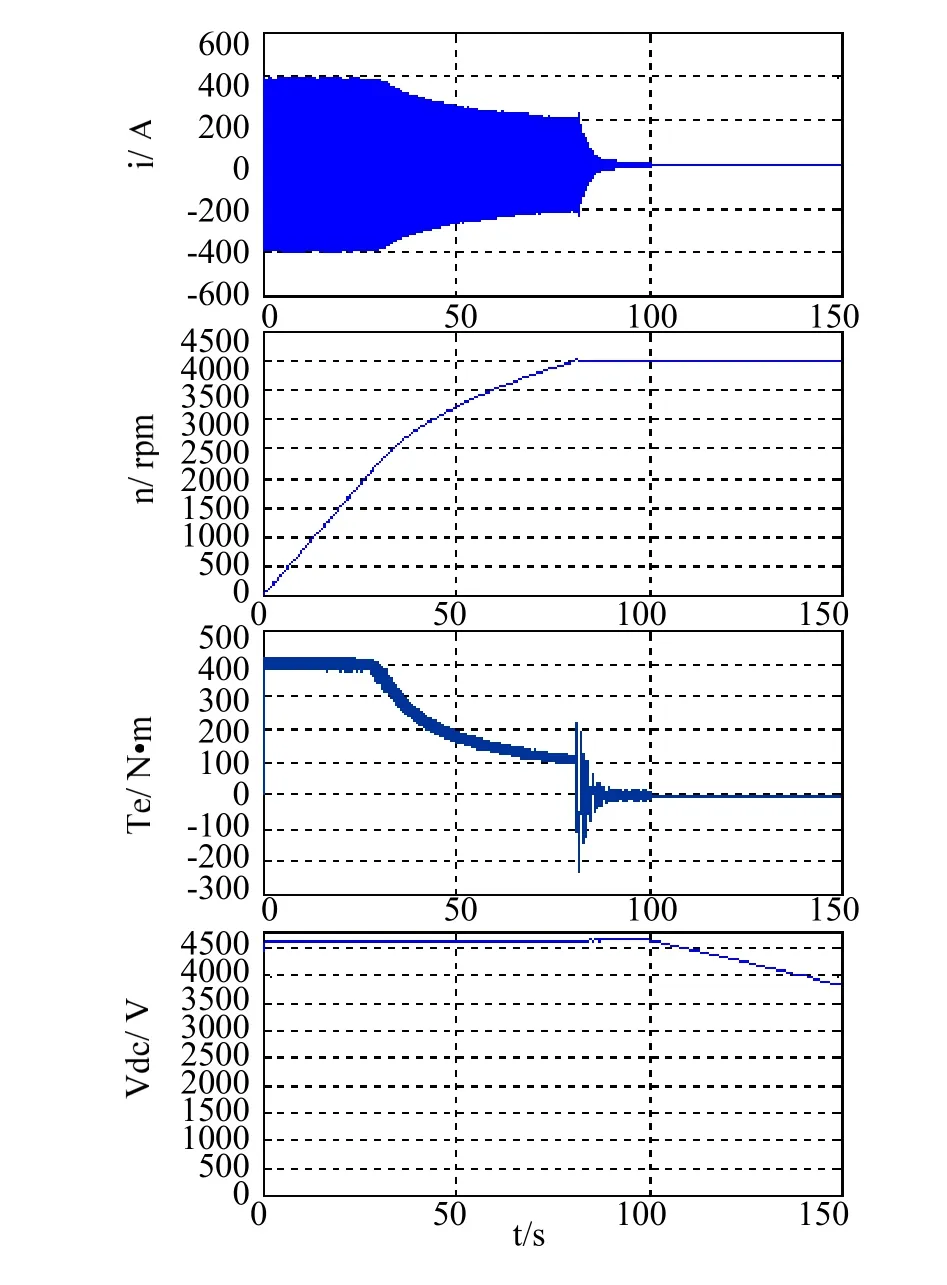
图4 飞轮电机的转速、转矩、电流及母线直流电压响应曲线
(4) 在t=3.4 s时,电机转速达到设定值4000 r/min,电机电流和转矩迅速减小,只以较小的值和飞轮阻力转矩平衡,维持飞轮稳定运行,因此稳态情况下,飞轮系统消耗的能量非常小;
(5) 在t=5 s时,电网电源与PWM变流器1断开,停止给电机供电,此时电机立刻转为发电机,由飞轮作为原动机拖动其运行,变流器2由逆变状态转为整流状态,把发电机发出的交流电转变为直流电,变流器1由整流状态转为逆变状态,把直流电调制为负载需要的电能提供给负载。
如仿真结果图5所示,在放能过程中,飞轮(与电机同轴)转速是不断下降的,提供的能量逐渐减少,因此直流母线电压也逐渐降低,只不过由于飞轮的转动惯量非常大,转速和能量的减小非常慢。
虽然直流母线电压逐渐降低,但是变流器 1采用负反馈控制方式,因此其输出电压(见图 6和图7)按设置要求维持不变。
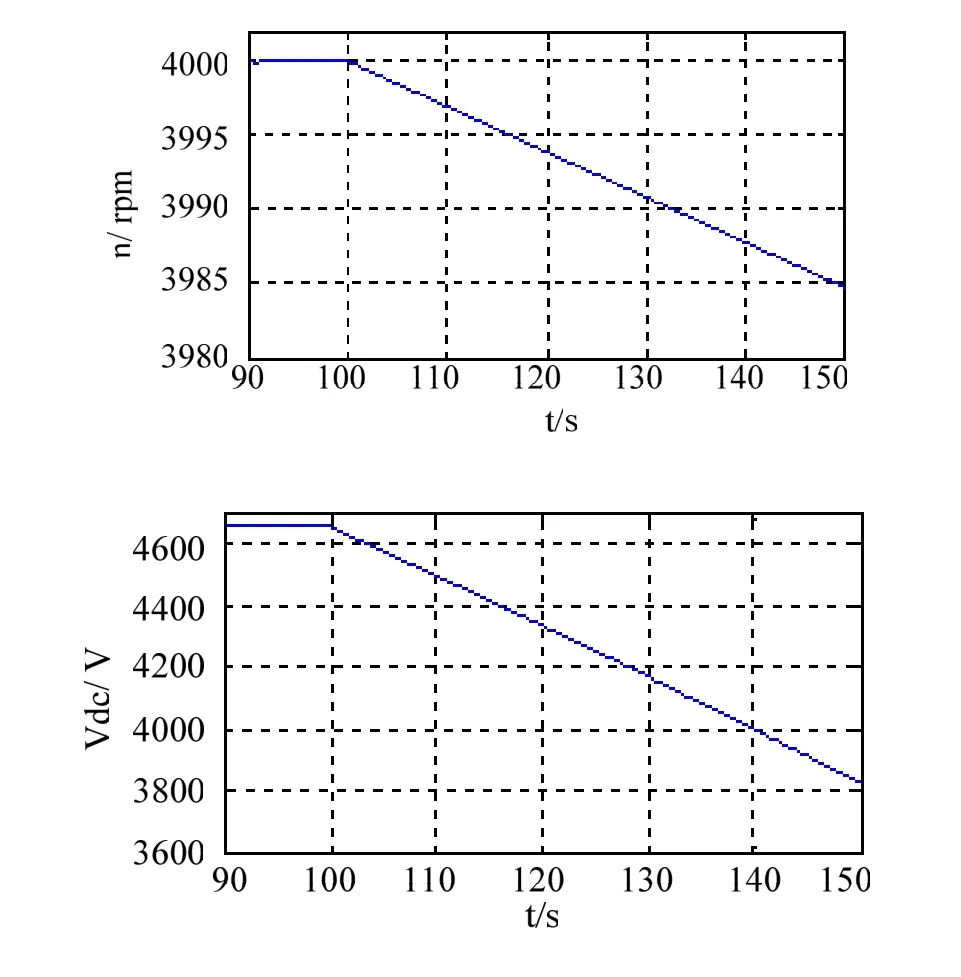
图5 飞轮转速与直流母线电压变化曲线
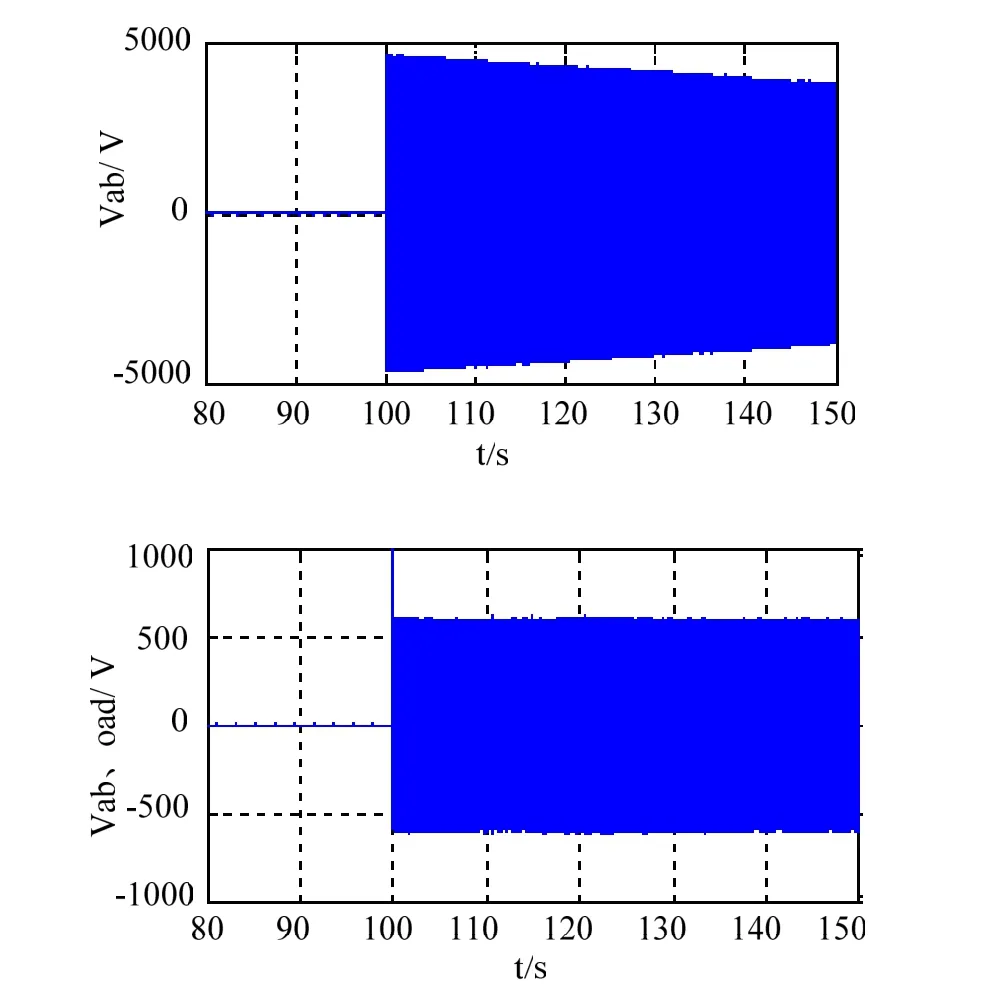
图6 飞轮储能系统工作在放电状态时的输出电压
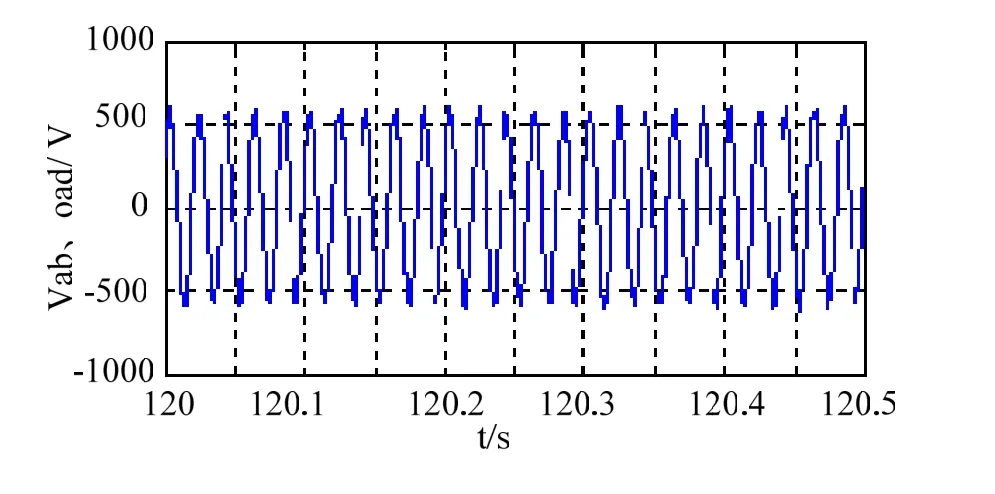
图7 飞轮储能系统工作在放电状态时的输出电压(局部放大图)
本例要求输出线电压为400 V(峰值为565 V),由图6和图7可见,虽然转速不断降低,直流电压不断下降,但是变流器1输出的电压维持在400 V不变。
4 结束语
本文按照飞轮储能系统实际组成搭建了飞轮储能系统的全系统模型。仿真模型中变流器采用SPWM控制,飞轮转子利用具有大转动惯量、小摩擦系数和小阻力转矩的负载模拟。为分析飞轮储能系统在独立电力系统中对于大功率负载的影响,仿真给出了系统在储能状态、放能状态及两者之间的转换过渡时刻的转速、转矩、电流及母线直流电压响应曲线,经过对仿真结果进行分析表明,转速、转矩、电流及母线直流电压的匹配关系与理论情况完全一致,证明了本文利用特殊负载模拟飞轮转子的方法是可行的,建立的飞轮储能负载仿真模型是正确有效的。利用该仿真模型可用于应用飞轮储能系统的电力系统计算与设计。
[1] Balikci A, Zabar Z, Czarkowski D, et al. Flywheel motor/generator set as an energy source for coil launchers[J]. IEEE Trans. on Magnetics, 2001,37(1):280-283.
[2] Takahash i I, Ok ita Y, A ndoh I. Development of long life three phase uninterrup tible power supply using flywheel energy storage unit [C].Proceedings of the 1996 International Conference on Power Electronics,Drives and Energy Systems for Industrial Growth.New York:IEEE Press, 1996:559-564.
[3] Bitterly J G. Flywheel technology: past, present, and 21stcentury projects[J]. IEEE Aerospace and Electronic Systems Magazine, 1998, 13:13-16.
[4] 姜新建, 朱东起, 黄斐梨等.电动汽车永磁同步电机驱动系统的研究[J].电机与控制学报,1997,1(4):208-214.
[5] 张宇, 俞国勤, 施明融等.电力储能技术应用前景分析[J]. 华东电力, 2006, 36(4):91-93.
猜你喜欢
模具制造(2019年7期)2019-09-25 07:30:00
四川冶金(2018年1期)2018-09-25 02:39:26
中国自行车(2017年11期)2017-04-04 02:51:30
通信电源技术(2016年1期)2016-04-16 04:57:26
电测与仪表(2016年8期)2016-04-15 00:30:16
通信电源技术(2016年4期)2016-04-04 02:57:12
校园英语·中旬(2015年7期)2015-08-10 01:35:27
电测与仪表(2015年16期)2015-04-12 00:44:34
电机与控制应用(2015年3期)2015-03-01 03:49:59
意林(2014年1期)2014-07-05 05:54:04