一种精密测距模拟器系统延时的测量方法
2011-03-20 03:50李占明温秀琴
电子科技 2011年7期
李占明,温秀琴
(1.陕西凌云电器集团有限公司设计所,陕西宝鸡721006;2.陕西凌云电器集团有限公司科技处,陕西宝鸡721006)
精密测距模拟器的系统延时是指从模拟器射频端口输入的射频询问脉冲信号的定时点起,到模拟器经过零公里的距离延时时间后,通过射频端口输出的射频应答脉冲信号的定时点之间的时间差。输入的询问信号频率为1 025~1 150 MHz,输出的信号频率为962~1213 MHz,两个信号频率相差63 MHz,而且频带覆盖较宽。精密测距模拟器通常有X、Y、Z、W共4种工作波道,在每种工作波道下又分为初始进场模式和最终进场模式,在每种模式下询问器的询问脉冲编码和模拟器的应答脉冲编码均不相同,其系统延时也不相同。
1 测量原理
1.1 系统延时
询问脉冲编码和应答脉冲编码及系统延时如表1所示。
1.2 测量原理及精度
询问器发射的询问信号和模拟器的应答信号均为射频脉冲信号,其脉冲包络波形如图1所示,其参数要求为:(1)脉冲上升时间<1.6 μs;(2)脉冲下降时间<2.5~3.5 μs;(3)脉冲宽度3.5±0.5 μs;(4)部分上升时间0.2~0.3 μs。
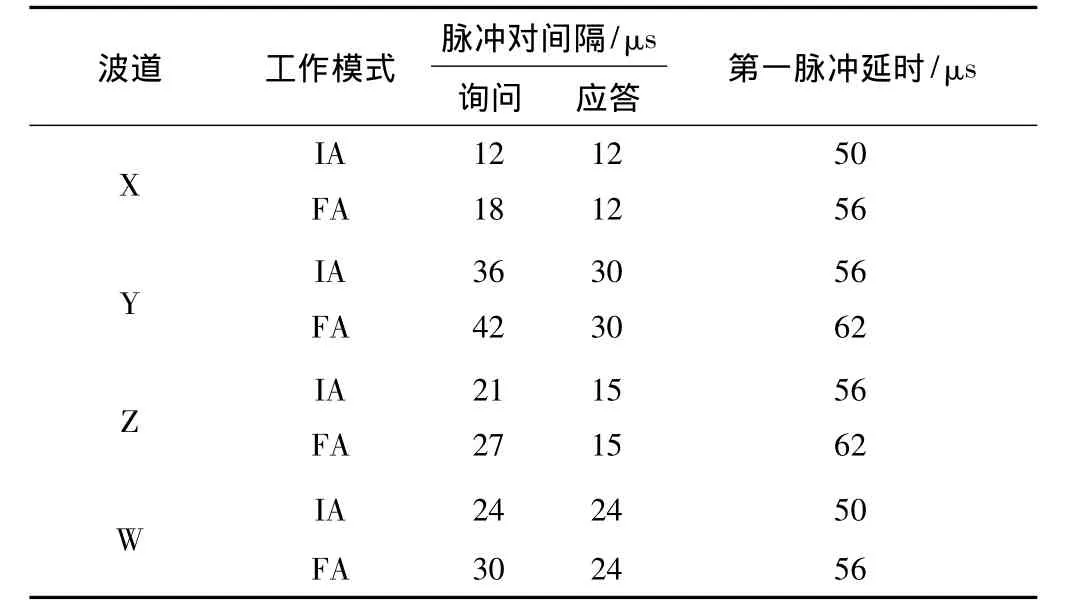
表1 询问、应答脉冲编码及系统延时表
要测量的系统延时在IA模式为询问脉冲对第一脉冲50%点和应答脉冲对第一脉冲50%点之间的时间,而在FA模式为询问脉冲对第一脉冲虚拟原点和应答脉冲对第一脉冲虚拟原点之间的时间,虚拟原点为脉冲上升沿30%点和5%点连线的延长线与横轴的交点,并且两点之间呈线性,所以为了便于测量,在FA模式可测量两脉冲10%点之间的时间。

图1 脉冲包络波形图
按照《国际民用航空公约》中准确度标准1的要求[1-2],距离精度FA模式为±10 m,IA为±15 m,折合时间分别为±33 ns和±50 ns。
2 测量方法
2.1 测量框图
询问器发射的询问信号由耦合器的A端加入,一方面经过耦合器衰减耦合输出至衰减器的B端,经过衰减器到检波器的C端,然后检波输出至示波器;另一方面经过耦合器到达E端,由D端进入模拟器。模拟器接收到询问信号,经过系统延时后产生应答信号由D端输出经E端由耦合器耦合输出至检波器的F端,然后检波输出至示波器。测量原理框图如图2所示[3-4]。

图2 测量框图
询问器发射的询问信号功率较大,为了保证不损坏检波器,信号在进入C端前必须对信号进行衰减。
2.2 数据分析
系统采用标准发射信号源代替询问器,要保证其发射波形满足上述要求,由信号源到耦合器A端的电缆对信号的延时不予考虑;当采用相同型号和特性的检波器且电缆M和N采用相同介质、长度的电缆时,发射信号和回答信号所经过这部分的延时相同,相互抵消,可不计入系统延时。按发射和回答信号所经过的路径,对系统延时可能造成影响的环节就分别集中在以下两个方面。
发射信号经过的路径延时包括:(1)由A端到B端的延时,记作Ta1;(2)由B端到C端的延时,记作Ta2;(3)由A端到E端的延时,记作Ta3;(4)由E端到D端的延时,记作Ta4。
回答信号经过的路径延时包括:(1)由D端到E端的延时,记作Tb1;(2)由E端到F端的延时,记作Tb2。
为了便于分析,定义发射信号由A端到C端的延时记作TT1(即TT1=Ta1+Ta2),由A端到D端的延时记作TT2(即TT2=Ta3+Ta4),接收信号由D端到F端的延时记作TR(即TR=Tb1+Tb2),模拟器的系统延时标称值记作To,示波器测量的延时记作TS。
下面分两种情况进行讨论:
(1)当TT1≤TT2时,时序如图3所示。

图3 脉冲时序1
测量延时为TS=To+TT2-TT1+TR,由此可见,测量延时应为规定的系统标称延时值和一固定时间(TX2-TX1+TR)之和。
(2)当TT1>TT2时,时序如图4所示。则测量的延时

令Tk=TT2-TT1+TR,则TS=To+Tk。
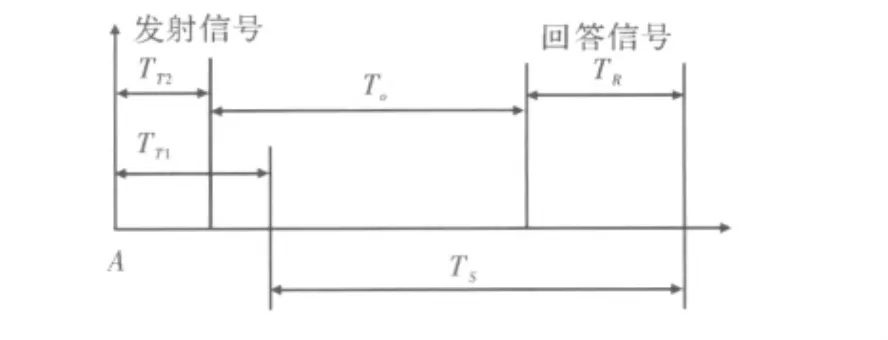
图4 脉冲时序2
从以上情况分析来看,理论测量的延时值应为系统规定的标称延时值与一固定延时之和。
2.3 各组件对信号延时分析
当测量出TS的值后,要计算模拟器的系统延时To,需进一步确定出试验中引入的固定延时Tk。其固定延时Tk主要由几个组件带来,可分别采用测量和计算的方法确定其值,当实际中采用仪表不能有效地测量组件的延时时,以理论计算的延时值为准。
(1)高频电缆对信号的延迟。
方法1测量法。通过网络分析仪测量出信号经过电缆的延迟,以确定Ta4、Tb1的值。
方法2计算法。通常采用的高频电缆芯线为铜材,芯线与外层屏蔽之间采用聚乙烯材料,按式(2)计算信号在电缆中的传输速度V。
如果规定电缆长度为0.5 m,那么信号经过电缆的延迟时间为

其中,ξr=2.26。因此,发射信号经过电缆E到D的延迟Ta4=2.5 ns;回答信号经过电缆D到E的延迟即Tb1=2.5 ns。
(2)定向耦合器对信号的延迟。
信号经过定向耦合器的主通路Ta3和耦合支路Ta1、Tb2延迟时间可采用计算方法得到,定向耦合器的主通路长度约为12 cm,耦合支路长度约为2 cm,微带线板材品种较多,其ξr为3.0~10.2不等,分别计算主通路的延时:当ξr取3.0时,延迟时间t≈0.7 ns;当ξr取10.2时,延迟时间为t≈1.2 ns;两值取四舍五入后的延迟时间t≈1 ns,从而得到Ta3=1 ns。
耦合支路的延时:当ξr取3.0时,延迟时间为t≈0.1 ns;当ξr取10.2时,延迟时间t≈0.2 ns;两值取四舍五入后的延迟时间t≈0 ns,从而得到Ta1=0 ns,Tb2=0 ns。
(3)衰减器对信号的延迟。
测量中用到的衰减器,可通过网络分析仪测出其延迟时间,从而确定出发射信号经过衰减器的延时Ta2。也可采用计算的方法得到Ta2=0。
经过上述2分析、测试和计算后,确定出发射信号经过的路径延时Ta1、Ta2、Ta3、Ta4和回答信号经过的路径延时Tb1、Tb2后,从而得到TS=To+TT2-TT1+TR=To+6。
3 误差分析
(1)在实验中,各组件的高频接插头为不可测量部分,其延时初步估计在0.1 ns以内,发射和回答信号经过的接插头共有8个,按最大延时计算共0.8 ns,折合距离为0.24 m。
(2)在测量检波视频脉冲时,示波器分辨率可达1 ns,但其时间标尺是靠人工移动来完成操作,这样就可能带来随机误差,比实际值小或大1 ns,也即引入1 ns人为误差,折合距离为0.3 m。
(3)由于发射信号和回答信号每次测量时可能存在一定量不可估计的随机误差,以及人为的读数误差等因素可能对测量造成一定误差,为了消除或减小这种随即误差,可采用多次测量求平均值的方法解决。

表2 测量数据
在IA和FA模式的①组数据为第1次测量的5次数据,②组数据为第2次测量的5次数据,其平均值之差分别为6 ns和0.6 ns,折合距离为1.8 m和0.18 m。通过5次测量求平均值的方法可减小和改善人为因素带来的随机误差。因此,由高频接插头、示波器的测量和人为读数误差等因素造成的误差为2.34 m,满足系统精度要求。
4 结束语
采取上述方法对PDME-200模拟器不同模式下的距离系统延时进行了测量和数据分析,证明本方法可对模拟器距离系统延时进行有效地测量,从而对模拟器的距离零公里延时定标奠定基础。
[1] 国际民用航空组织.国际民用航空公约[M].北京:中国民航出版社,1985.
[2] JOHN D K.Antennas:for all applications[M].章文勋,译.北京:电子工业出版社,2005.
[3] 何进.国外L频段航空电子设备电磁兼容设计分析及启示[J].现代电子技术,2010(3):31-36.
[4] 孙景芳,刘宁庆.差分GPS收发信机的软件化实现[J].现代电子技术,2006(19):22-24,27.
猜你喜欢
小哥白尼(趣味科学)(2021年6期)2021-11-02
煤气与热力(2021年3期)2021-06-09
故事作文·高年级(2021年4期)2021-05-06
小哥白尼(神奇星球)(2021年11期)2021-03-08
湖南邮电职业技术学院学报(2020年3期)2020-10-13
交通运输系统工程与信息(2020年1期)2020-02-28
中学数学杂志(高中版)(2018年5期)2018-01-08
汽车文摘(2016年3期)2016-12-09
中国塑料(2016年8期)2016-06-27
装备环境工程(2015年5期)2015-02-28