星历和星钟参数辅助精度对AGPS接收机捕获性能的影响
2011-03-08 02:27:48谷文飞
电讯技术 2011年4期
谷文飞,吕 晶,常 江,徐 荣
(1.解放军理工大学通信工程学院研究生四队,南京 210007;2.解放军理工大学通信工程学院训练部,南京 210007)
1 引 言
随着基于位置服务需求的日益增长,GPS接收机在室内、城市峡谷、森林等有严重信号衰落环境下的应用越来越多。在这些环境中,卫星信号极其微弱,信号强度比室外低20~30 dB,若没有辅助信息的辅助,普通接收机对GPS信号的捕获将变得十分困难。
针对在微弱信号环境下的导航定位问题,美国率先实施了由GPS与地面无线通信网相结合的辅助定位解决方案(AGPS)。该方案的最大优点是能通过其它方式(如无线通信网络)提供辅助信息(如卫星星历、星钟修正、接收机概略位置等)辅助AGPS接收机完成信号的捕获、跟踪和定位解算等。在辅助模式下捕获时,AGPS接收机(MS-based模式)或参考服务器(MS-assisted模式)能够估算出捕获时刻的多普勒范围及其不确定度,减少接收机的捕获时间,进而提高接收机的灵敏度。
2 辅助信息的类型
在MS-based应用模式中,辅助信息主要包括两个方面,即描述导航卫星自身运动状态的电文信息以及接收机终端的运行状态。
理论上讲,参考服务器可以向AGPS接收机提供任何辅助信息。由于卫星信号的多普勒频移是由用户接收机与卫星在其两者连线方向上的相对运动引起的,所以,估算捕获时刻的多普勒至少需要卫星的位置和速度以及接收机的位置和速度。要确定卫星的位置和速度,关键是要获取卫星导航电文的前3个子帧,即卫星时钟和卫星星历信息等。
根据文献[1],计算卫星位置和速度需包含以下参数。
第一数据块(第1子帧)主要提供导航卫星的时钟修正参数和健康状态。用于时间修正的参数主要包括群时延修正值TGD和卫星时钟修正参数toc、af0、af1、af2。群时延修正值只适用于单频(L1或L2)接收机。根据文献[2],目前的GPS接收机99%以上都是L1接收机,所以参数 TGD是绝大多数接收机必需的时间修正项。toc为卫星时钟的参考时间,有效期一般为2 h。af0、af1、af2为卫星时钟模型修正多项式中的3个系数。
第二数据块(第2子帧和第3子帧)提供该卫星自身的星历参数。星历的原意是一张用来精确描述卫星在各个时刻的空间位置和运行速度的大表格。导航卫星播发的一套星历参数,实际上是描述卫星运行状态的16个开普勒参数。
用MR2000型金相显微镜,对试样进行显微组织观察;用CMT5105型电子万能试验机,测定试样的拉伸性能;用型号为HB-3000B的布氏硬度计,测试样的宏观硬度;用ARL3460的直读光谱仪,对试样进行元素定量分析;用型号为JSM-6490LV型号的钨灯丝扫描电子显微镜[2],拍摄试样的扫描照片.
接收机的运动状态主要包括接收机的位置和速度。由于接收机视线方向的速度分量会对多普勒产生显著影响,而接收机的位置误差对多普勒的影响并不明显。因此,在AGPS系统中最常用的接收机概略位置坐标,是由参考服务器通过CELL-ID定位算法所提供的无线网络小区基站的位置坐标。定位精度为,在95%的时间里,城市为200 m,农村为35 km[3]。接收机位置的不准确性所带来的最大多普勒误差约为1 Hz/km;而对于接收机速度,如1 km/h,最大可产生约1.46Hz的多普勒频移[4]。这些量级的多普勒偏差,一般对于接收机的频率搜索范围影响不大。以下的分析皆不考虑接收机的动态范围和位置误差,即接收机处于静止状态。
3 星历和星钟参数辅助精度对多普勒的影响
3.1 算法原理
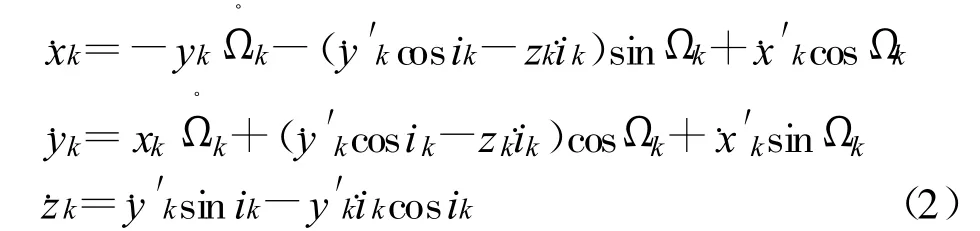
根据时钟和星历信息,卫星在WGS-84坐标系中t时刻的坐标值(xk,yk,zk)可表示为

再次根据文献[5-6],对式(1)求导,可得出由卫星星历参数表达的卫星速度值():

式中,1(s)为信号发射时刻 t时,由接收机至卫星的单位观测矢量;v(s)为t时刻卫星的速度矢量,即式(2)所计算出的坐标值();v 为 t 时刻接收机的速度矢量,文中仿真设置为0;λ为卫星信号载波(L1或L2)的相应波长,本文选取为L1;-﹒r反映了接收机向卫星靠近的距离变化率。当卫星与接收机远离时,-为负,从而多普勒频移 fd也就是个负数,即接收机接收到的载波频率小于其发射频率fL1;反之亦然。
3.2 辅助精度的选取
当然,如果把用于导航定位的全部电文都直接用于多普勒频移计算,能得到相对精确的卫星位置坐标,进而得到较精确的多普勒估计值。但是,通过下面的仿真分析我们可以看出,这种相对精确的多普勒辅助值对接收机捕获性的提高将是不明显的,甚至是无意义的。那么,星历和星钟参数可提供的辅助精度如何?不同精度的辅助模式对多普勒误差的影响有多大?下面分3个场景进行论述。
3.2.1 精简的星历和星钟参数辅助
历书记载着所有在轨卫星的概略位置及其状况等,可以把历书作为概略星历计算卫星信号的多普勒频偏。对比分析历书和星历、卫星时钟的参数特点可以看出,一套卫星历书只包含10个基本参数。其中,包含星历对应项中的8个参数,卫星时钟对应项中的2个参数。其它10个参数只是对前面10个基本参数的修正值。所以首先想到的第一个场景是去除星历、时钟参数中的10个修正项,只保留和历书同样多的参数个数,得到精简的星历和星钟参数辅助模式。
3.2.2 截短的星历和星钟参数辅助
进一步对上述10个基本参数进行截短,即截去精简辅助模式中相关参数的低位比特,只保留高位比特,得到截短的星历和星钟参数辅助模式。截短后的辅助参数和历书中对应项的参数具有相等的比特表示位数。其目的是减少辅助信息的比特数,降低无线网络传输的信息流量,增强辅助信息的实时性,提高接收机的捕获速度。
3.2.3 由历书所得到的多普勒辅助
文献[2]对比分析了由卫星星历和历书计算的卫星位置对多普勒的影响。实验条件为,不同的星历数目大于500套,计算多普勒所使用的历书时间比星历早1周。实验结果为:50%概率的最大多普勒值为2.6 Hz,99%概率的最大多普勒为61.8 Hz,最坏情况下的多普勒值为163.4 Hz。
现将3种场景下参考网络所提供的辅助数据参数个数、比特总数统计如表1所示。

表1 辅助参数类型及其比特数Table 1 Assisted parameter type and bit number
4 仿真及实验结果分析
为了验证算法的有效性,本文使用GPS系统的真实导航电文数据进行仿真。实验过程中接收机处于静止状态,其在WGS-84中的位置坐标为xu=(-2608366.3897,4742522.3225,3363036.8457),速度为vu=0。观测时间为星历有效期的一个曲线拟合间隔,2010年 11月04日下午 14:00:00到16:00:00。
图1和图2分别给出了由测距码编号为PRN32的卫星所播发的星历和星钟参数和在全参数、精简参数以及截短参数辅助模式下所计算的伪距偏差和多普勒偏差。其中,rf-rr、rf-rt、rr-rt分别表示全参数辅助与精简参数辅助、全参数辅助与截短参数辅助、精简参数辅助与截短参数辅助之间的伪距偏差 。fdf-fdr、fdf-fdt、fdr-fdt分别表示全参数辅助与精简参数辅助、全参数辅助与截短参数辅助、精简参数辅助与截短参数辅助之间的多普勒偏差。
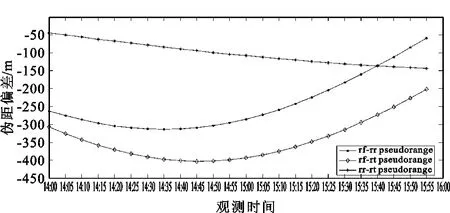
图1 PR N32卫星的伪距偏差Fig.1 Pseudorange bias of PR N32 satellite

图2 PRN32卫星的多普勒偏差Fig.2 Doppler bias of PRN32 satellite
表2和表3分别给出了2 h的观测时间段内编号为 PRN4、PRN8、PRN11、PRN17、PRN20、PRN27、PRN28、PRN32共8颗可见卫星的伪距和多普勒偏差统计结果。其中,计算间隔为5 min,计算点数共192个。
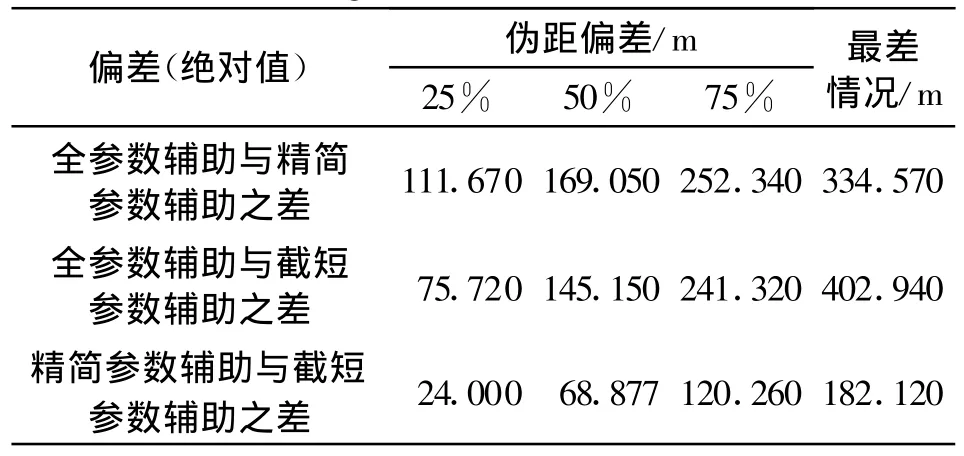
表2 8颗可见卫星的伪距偏差统计结果Table 2 Pseudorange bias statistic of 8 satellites in view
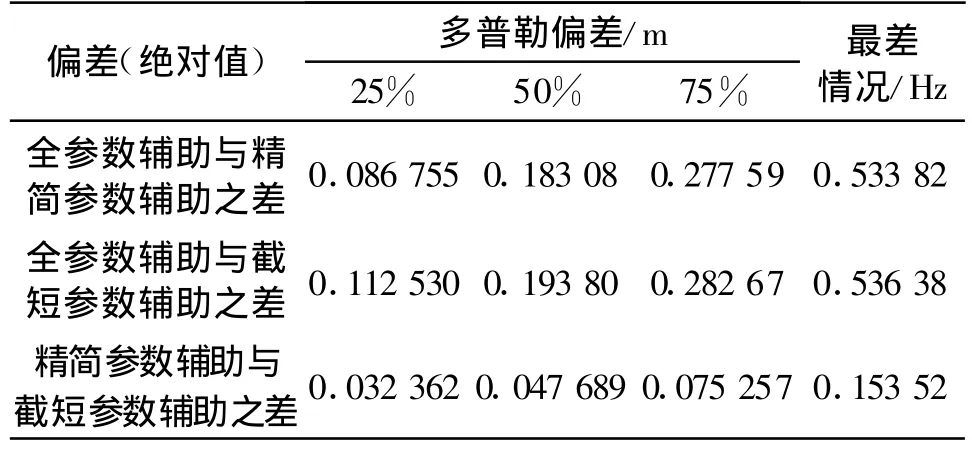
表3 8颗可见卫星的多普勒偏差统计结果Table 3 Doppler bias statistic of 8 satellites in view
分析实验结果,可以得出结论:
(1)从仿真结果可以看出,与全星历和卫星时钟参数辅助相比,星历和卫星时钟参数精简或截短后对卫星位置的计算有较大影响,可达到几百米;而对多普勒数值的影响并不大,增加的多普勒偏差基本上都在1Hz以内。
(2)结合上述分析可知,两种方法所计算的多普勒值与真实多普勒值之间的误差要远远小于由历书计算所得到的多普勒误差。对于接收机做1 ms的相关积分进行捕获时,如果频率搜索步长设置为500 Hz,则以上3种情况所提供的辅助多普勒值对接收的捕获性能影响并不大。但如果在微弱信号条件下做10 ms的相关积分捕获,频率搜索步长设置为50 Hz,则由历书所确定的多普勒搜索空间就会比其它方法多出3个搜索频点。接收机搜索时间增加,捕获性能下降。
(3)由表1还可以看出,对于多普勒而言,用精简或截短辅助代替全星历和卫星时钟参数辅助所带来的偏差并不大;但辅助信息的位数却有很大差别,截短辅助比全辅助减少了1.55倍。如果利用无线通信网络提供辅助信息,截短辅助有利于减少信息量的传输,避免无线通信信道更大概率的拥塞,有利于提高接收机的捕获时间和速度,进而可增加接收机的捕获灵敏度。对于MS-based辅助模式的导航接收机而言,辅助信息交换频繁,截短处理方式对捕获性能的提高更为明显。
总之,精简的星历和卫星时钟参数大大减少了辅助网络所需传输的数据量,避免通信信道更大概率的拥塞,进一步压缩了接收辅助信息的时间,提高了辅助条件下接收机的捕获速度。当然,如果后续还需接收机定位,则上述精简的星历和卫星时钟参数不能直接应用,辅助网络还必须传输相应截短参数的低位数据。这些结论对于辅助卫星导航系统的实际应用都有很好的参考意义。
[1]IS-GPS-200 D,ARINC Engineering Services/Navstar GPS Space Segment/Navigation User Interfaces[S].
[2]Frank van Diggelen.A-GPS:Assisted GPS,GNSS,and SBAS[M].London:Artech House,2009.
[3]Deng Zhongliang,Zou Dejun,Huang Jianming,et al.The Assisted GNSS Boomed up Location Based Services[C]//Proceedings of the 5th InternationalConference onWirelessCommunications,Networking and Mobile Computing.Beijing:IEEE,2009:1-4.
[4]谢钢.GPS原理与接收机设计[M].北京:电子工业出版社,2009:75,354-357.XIE Gang.Principles of GPS and Receiver Design[M].Beijing:Publishing House of Electronics Industry,2009:75,354-357.(in Chinese)
[5]Korvenoja P,Piche R.Efficient Satellite Orbit Approximation[C]//Proceedings of ION GPS 2000.Salt Lake City,USA:IEEE,2000:1930-1937.
[6]Zhang J,Zhang K,Grenfell R,et al.GPS Satellite Velocity and Acceleration Determination using the Broadcast Ephemeris[J].Journal of Navigation,2006,59(2):293-305.
猜你喜欢
散文选刊·下半月(2022年4期)2022-04-22 01:44:03
阅读(低年级)(2019年4期)2019-05-20 03:08:34
测控技术(2018年6期)2018-11-25 09:50:18
电子制作(2018年19期)2018-11-14 02:36:40
特别健康(2018年2期)2018-06-29 06:14:00
西夏学(2018年1期)2018-04-29 09:08:28
电子制作(2017年17期)2017-12-18 06:40:47
电子制作(2016年1期)2016-11-07 08:42:41
系统工程与电子技术(2016年4期)2016-08-24 07:46:04
全球定位系统(2015年4期)2015-02-28 12:37:57