声自导鱼雷固定提前角导引法追踪效果研究
2011-03-07 06:20薛昌友孙雪海杜亮管贺
舰船科学技术 2011年3期
薛昌友,孙雪海,杜亮,管贺
(1.海军潜艇学院软件中心,山东青岛266071;2.海军潜艇学院研究生3队,山东青岛 266071)
0 引言
声自导鱼雷捕获到目标后,随即转入自导导引段,按照预先设定的导引方法跟踪目标。常用的自导导引方法有尾追法、固定提前角法、变提前角法、平行接近法等。从工程实现的难易程度及鱼雷末端攻击效果等方面考虑,固定提前角法是一种比较理想的导引方法。固定提前角导引法的优点是工程上易于实现,且鱼雷接近目标时的舷角不等于0,从而增大了目标的有效尺寸。缺点是在目标的前半球开始导引时鱼雷要绕到目标的尾后,对鱼雷的机动性要求较高[1]。影响鱼雷追踪效果的因素很多,本文将通过Monte-Carlo法对鱼雷采用固定提前角导引法的追踪效果进行仿真,重点分析目标速度、鱼雷速度、鱼雷自导作用距离、接敌角以及固定提前角取值对追踪效果的影响。
1 主要数学模型
1.1 目标和鱼雷运动模型
1.1.1 目标运动模型
目标以一定的速度和航向作等速直线运动。
1)目标初始位置
t0时刻目标的初始位置为:

2)任一时刻目标的位置为:
1.1.2 鱼雷运动模型
鱼雷与目标的初始距离r0为鱼雷自导作用距离R。
1)t0时刻鱼雷的初始位置为:

2)任一时刻鱼雷的位置为:
1.2 追踪弹道模型
固定提前角导引法追踪弹道过程如图1所示。在鱼雷接近目标的过程中,鱼雷速度矢量与瞄准线之间的夹角η始终保持不变。图中R为鱼雷自导作用距离;θ为接敌角;r为鱼雷与目标之间的距离;q为视线与目标航向线的夹角;φ为鱼雷与目标的航向角;η为提前角。
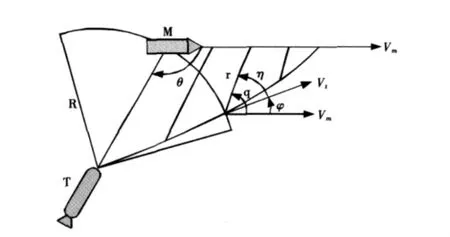
图1 固定提前角导引法追踪弹道Fig.1Track trajectory of FLAG
由此,得到相对运动方程为[2]:
约束方程为

1.3 鱼雷命中目标条件
判断鱼雷是否命中目标的主要依据是鱼雷与目标之间的距离r。若满足r≤30m则认为鱼雷命中目标。其中

2 仿真计算及结果分析
2.1 计算条件
2.1.1 鱼雷
1)鱼雷速度的可取值分别为30 kn,35 kn,40 kn,45 kn和50 kn,自导扇面角±30°,最大旋回角速度6°/s,探测方位均方差1°,鱼雷自导作用距离的取值分别为800 m和1 500 m,固定提前角的取值分别为10°,15°,20°,25°。
2)鱼雷速度的取值要求:若能满足Vt≥1.5 Vm,则Vt的初值取与1.5 Vm相差最小的速度可取值,而后在速度可取值的范围内依次增加;若不能满足Vt≥1.5 Vm,鱼雷速度取最大值50 kn。
2.1.2 水面舰艇
水面舰艇以航向90°并分别以20 kn,25 kn,30 kn和35 kn航速作等速直线运动。
仿真时间步长0.2 s,接敌角每间隔2°采集1组数据,各角度仿真1 000次,接敌角变化范围0°~180°。
2.2 结果分析
通过对不同目标速度、鱼雷速度、鱼雷自导作用距离、接敌角以及固定提前角的条件下,鱼雷采用固定提前角导引法的追踪概率进行仿真,分别得到图2~图4所示概率曲线。仿真结果表明,当接敌角大于90°时,所有计算条件下鱼雷都能对目标进行稳定跟踪,为了便于显示,图2~图4中接敌角范围为0°~90°。
图2 Vm=20 kn,不同Vt,R,θ,η时的追踪概率曲线Fig.2The curve of track probability in different Vt,R,θ and η when Vmamounts 20 kn
1)目标速度和接敌角对追踪概率的影响
取Vt=50 kn,R=1 500 m,η=25°,比较目标速度分别取20 kn,25 kn,30 kn和35 kn时,鱼雷能对目标进行稳定跟踪的接敌角最小值θmin。
从表1可以看出,鱼雷能稳定跟踪目标的θmin随着目标速度的增加而减小。
2)鱼雷速度和接敌角对追踪概率的影响
取Vm=20 kn,R=1 500 m,η=25°,比较鱼雷速度分别取30 kn,35 kn,40 kn,45 kn和50 kn时,鱼雷能对目标进行稳定跟踪的θmin。
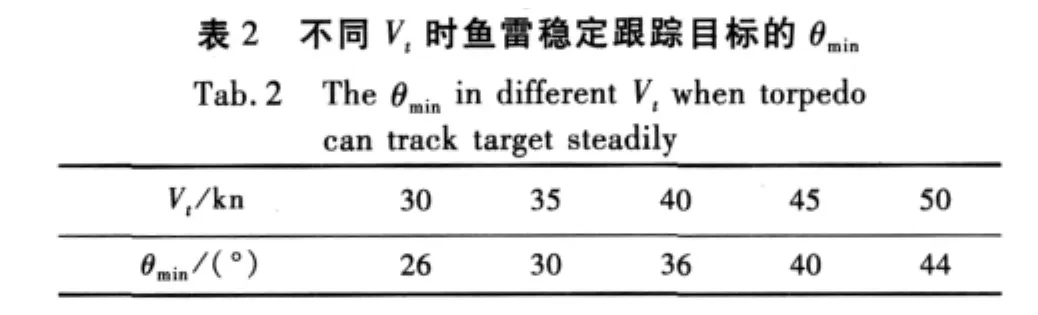
从表2可以看出,鱼雷能稳定跟踪目标的θmin随着鱼雷速度的增加而增加。
3)自导作用距离和接敌角对追踪概率的影响
取Vm=25 kn,Vt=50 kn,η=25°,比较鱼雷自导作用距离分别取800 m和1500 m时,鱼雷能对目标进行稳定跟踪的θmin。

从表3可以看出,鱼雷能稳定跟踪目标的θmin随着鱼雷自导作用距离的增加而增加。
4)固定提前角和接敌角对追踪概率的影响
取Vm=20 kn,Vt=50 kn,R=1 500 m,比较固定提前角分别取10°,15°,20°和25°时,鱼雷能对目标进行稳定跟踪的θmin。
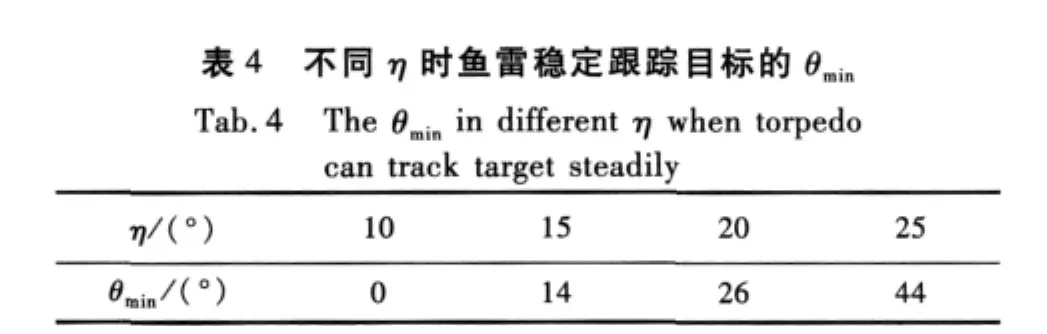
从表4可以看出,鱼雷能稳定跟踪目标的θmin随着固定提前角的增加而增加。
另外,受鱼雷机动性(即最大旋回角速度)的影响,鱼雷在某些接敌角范围内攻击高速目标,当目标相对于鱼雷的方位变化量大于鱼雷自身的最大旋回角速度时,容易造成鱼雷脱靶。如图4所示追踪概率曲线,取Vm=30 kn和35 kn,η=10°,R=800 m时鱼雷的追踪概率在接敌角为50°附近明显降低;R= 1 500 m时鱼雷的追踪概率在接敌角为40°附近明显降低。由此表明,在小提前角攻击高速目标时,由鱼雷机动性导致的追踪概率明显降低的接敌角范围随着自导作用距离的增加而减小。
3 结语
本文对鱼雷采用固定提前角导引法追踪效果进行了定量的仿真研究,得出了一些规律性的结论,对作战使用具有一定的参考价值。但鱼雷攻击是一个复杂的过程,各个环节之间既相互促进又相互制约,只有在满足一定的捕获概率的基础上,综合权衡鱼雷速度、提前角和接敌角等参数的取值,才能保证鱼雷获得比较高的命中概率。
[1]石秀华,王晓娟.水中兵器概论(鱼雷分册)[M].西安:西北工业大学出版社,2004.
[2]严卫生.鱼雷航行力学[M].西安:西北工业大学出版社,2004.
[3]孟庆玉,张静远,宋保维.鱼雷作战效能分析[M].北京:国防工业出版社,2003.
[4]贾跃,宋保维,赵向涛,李文哲.水面舰船对声自导鱼雷防御机动方法研究[J].火力与指挥控制,2009,34(1): 45-48.
[5]杨绪升,刘建兵,周庆飞.声自导鱼雷射击诸元及误差对其捕获概率的影响[J].指挥控制与仿真,2009,31(5): 93-97.
猜你喜欢
中学生数理化·中考版(2022年6期)2022-06-05
小哥白尼(军事科学)(2021年8期)2021-11-22
中学生数理化·中考版(2021年6期)2021-11-22
智能计算机与应用(2021年5期)2021-10-05
新世纪智能(数学备考)(2021年4期)2021-08-06
新世纪智能(数学备考)(2021年4期)2021-08-06
小哥白尼(军事科学)(2020年8期)2020-05-22
军事运筹与系统工程(2017年1期)2017-07-31
水下无人系统学报(2016年3期)2016-10-13
指挥控制与仿真(2015年1期)2015-01-10