非理想条件下三轴磁通门传感器误差修正方法
2011-03-07 06:20周榕军刘大明洪泽宏赵永周国华
舰船科学技术 2011年3期
周榕军,刘大明,洪泽宏,赵永,周国华
(1.海军工程大学电气与信息工程学院,湖北武汉430033; 2.中国人民解放军91003部队,海南三亚 572016)
0 引言
三轴磁通门传感器所具有的高分辨率和良好的鲁棒性使其广泛应用于民用和军事领域[1-2],如导航系统、磁探伤、舰船磁场测量。就理论上而言,磁通门传感器的3个测量轴必须相互正交。然而在实际制造过程中,由于制造工艺和加工水平的限制,3个测量轴不可能做到绝对正交。此外,为方便磁场测量数据的处理,通常需将磁传感器水平放置,但在磁传感器的实际使用过程中,很难使磁传感器绝对水平地放置。三轴磁传感器本身所固有的上述特点都给磁场测量带来了较大的测量误差,从而难以应用于磁场测量精度要求较高的场合。因此,许多工作者对三轴磁传感器进行了研究,文献[3]采用共轭梯度法校正了三轴磁传感器正交性误差,文献[4-5]分析了三轴磁传感器非理想放置时数据处理方法及其水平修正方法,文献[6-7]基于最小二乘多项式曲线拟合原理提出了磁传感器非线性误差的消除方法。在实际磁场测量过程中,非正交误差和非水平误差是同时存在的,而过去通常将非正交误差和非水平误差进行独立校正,当校正其中之一时需假设另1个误差不存在,因而校正较为粗略。本文基于微分进化算法提出1种非正交和非水平误差联合修正方法。
1 三轴磁传感器测量模型
假设存在非正交误差和非水平误差的三轴磁传感器状态为非理想状态,3个测量轴分别为ox,oy和oz,三轴输出值分别为Bx,By和Bz。不存在非正交误差和非水平误差的三轴磁传感器状态为理想状态,3个测量轴分别为oxt,oyt和ozt,三轴输出值分别为Bxt,Byt和Bzt,且使ox与oxt位于同1个垂直平面内。如图1所示,α1为测量轴x与测量轴xt之间的夹角,α2为测量轴x与测量轴yt之间的夹角,α3为测量轴x与测量轴zt之间的夹角。为方便,同样令β1,β2和β3分别为测量轴y与测量轴xt,yt,zt之间的夹角,γ1,γ2,γ3分别为测量轴z与测量轴xt,yt,zt之间的夹角。
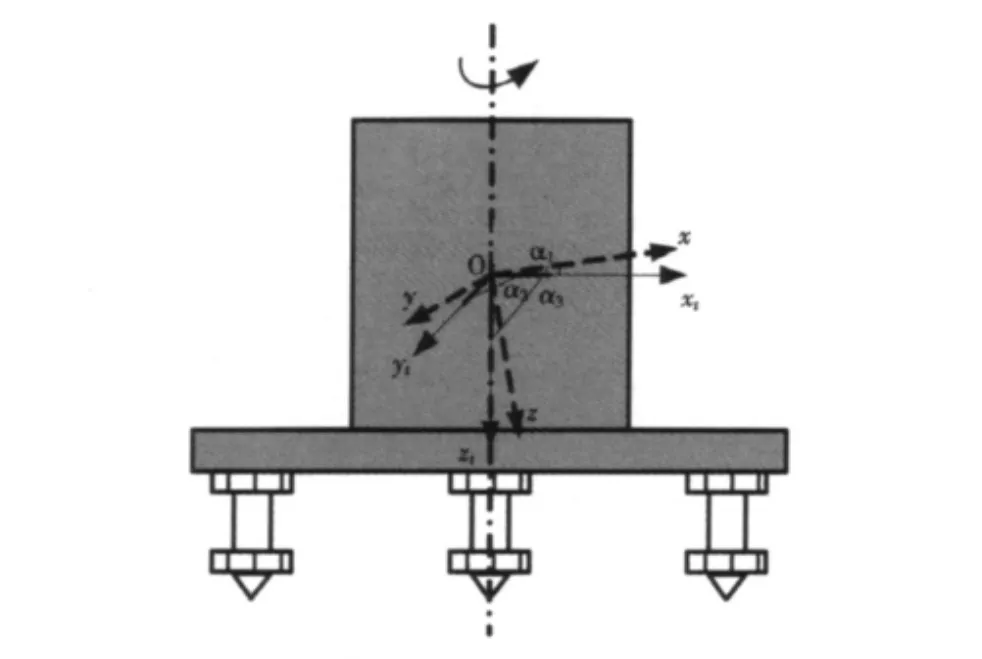
图1 非理想状态与理想状态磁传感器测量轴关系示意图Fig.1The sketch map of the relationship of measurement axis between the ideal and non-ideal magnetic sensor
由上述理想状态下磁传感器与非理想状态下磁传感器测量轴之间关系可知,非理想状态下磁传感器三轴输出值可表示为
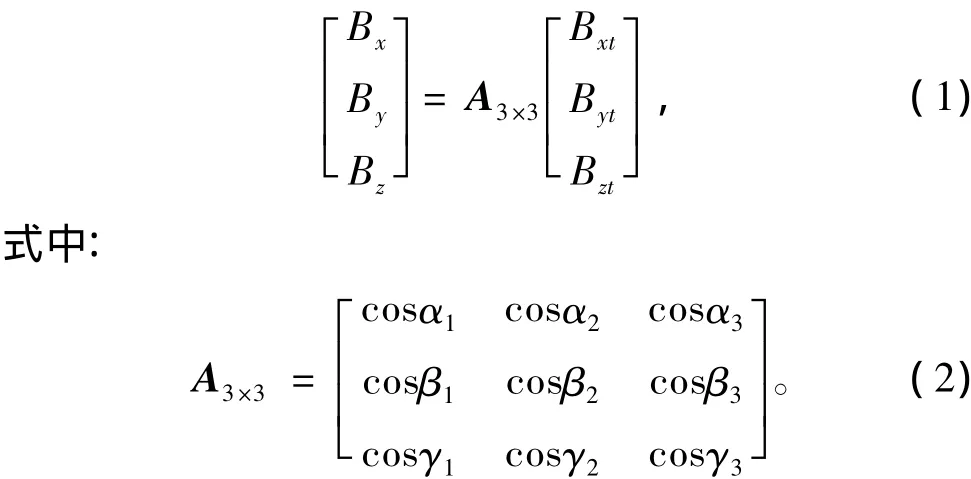
可以看出,若已知转化矩阵A3×3,则可利用非理想状态下磁传感器三轴测量值求出理想状态磁传感器三轴测量值,
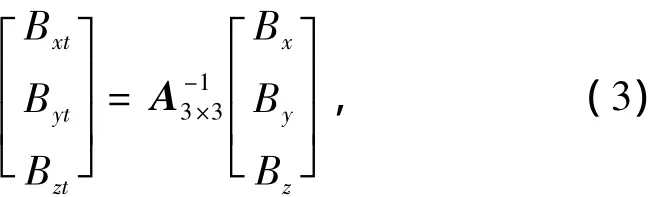
从而消除非理想状态磁传感器三轴测量值中的非正交误差和非水平误差。
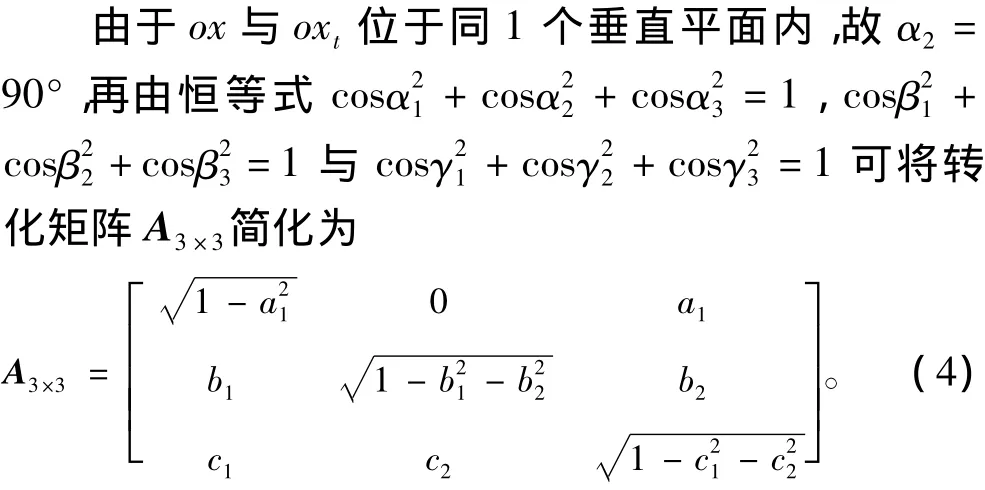
式中:a1,b1,b2,c1,c2为转化矩阵参数,且都小于1。对于三轴磁传感器而言,其可满足一定的正交度和水平度要求,因而可将转化矩阵A3×3中参数范围进一步缩小。
2 基于微分进化算法的转化矩阵参数求解
在仅有地磁场作用的同一测量点处,使磁传感器绕中轴线作旋转运动,如图1所示。每旋转一定角度就记录下磁传感器三轴输出值,经n次旋转则可得到n组磁场测量数据,分别记为,其中i= 1,2,…,n。显然,若磁传感器不存在非正交和非水平误差,则磁传感器z轴输出值Bzt和三轴总量值Bxt2+ Byt2+Bzt2均恒定不变。根据此特征,可建立以转化矩阵参数为未知量的优化模型:
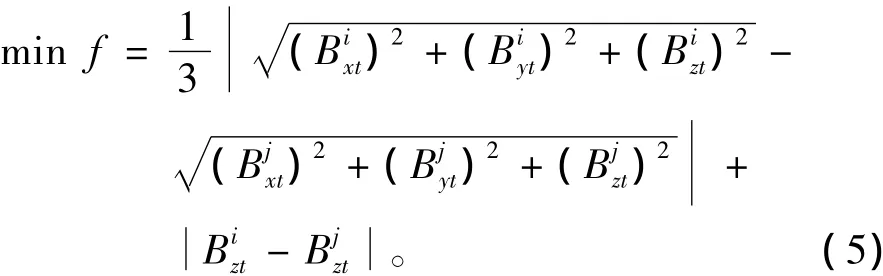

式中:函数关系F由式(3)~(5)确定。不难看出,该优化模型是一个非线性优化问题,必须采用优化算法来对其进行求解,以得到转化矩阵参数。鉴于随机类优化算法中微分进化算法(Differential Evolution,DE)简单且有效,采用微分进化算法来求解上述非线性优化问题。
微分进化算法的基本思想是对种群中的每个个体i,从当前种群中随机选择3个点,以其中1个点为基础,另2个点为参照作1个扰动,所得点与个体i交叉后进行“自然选择”,保留较优者,实现种群的进化[8-9]。
不妨将优化参数a1,b1,b2,c1,c2记为向量形式的自变量[x1,x2,x3,x4,x5],采用微分进化算法优化求解上述模型时,具体步骤为:
1)初始化进化参数。设置种群规模N,交叉概率Pc,交叉因子Fw,进化次数t,自变量参数阈值lb和ub。随机生成初始种群X(0)={X1(0),X2(0),…,XN(0)},其中
2)个体评价。计算每个个体Xi(t)的目标函数值F(Xi(t))。
3)交叉繁殖。对种群中的每个个体Xi(t),随机生成3个互不相同的随机整数rs(1≤rs≤N)和随机整数jr(1≤jr≤n),按下式进行计算:
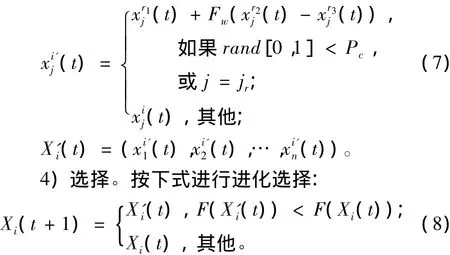
5)如果满足迭代结束要求,则输出种群中具有最小目标函数值的个体作为最优解。否则返回步骤2)。
3 传感器实验
将试验磁传感器置于低磁实验室内某测量点处,并将磁传感器绕中轴线按顺时针等间隔30°旋转1周,记录得到了12组磁场测量数据,实验示意图见图2。
图2 传感器实验示意图Fig.2The sketch map of the magnetic fluxgate sensor experiment
采用微分进化算法来优化求解转化矩阵参数时,微分进化算法中具体参数为:参数数目m=5,种群规模N=25,交叉概率Pc=1,交叉因子Fw=0.85,参数变化范围lb=-0.2,ub=0.2,迭代次数t=500。
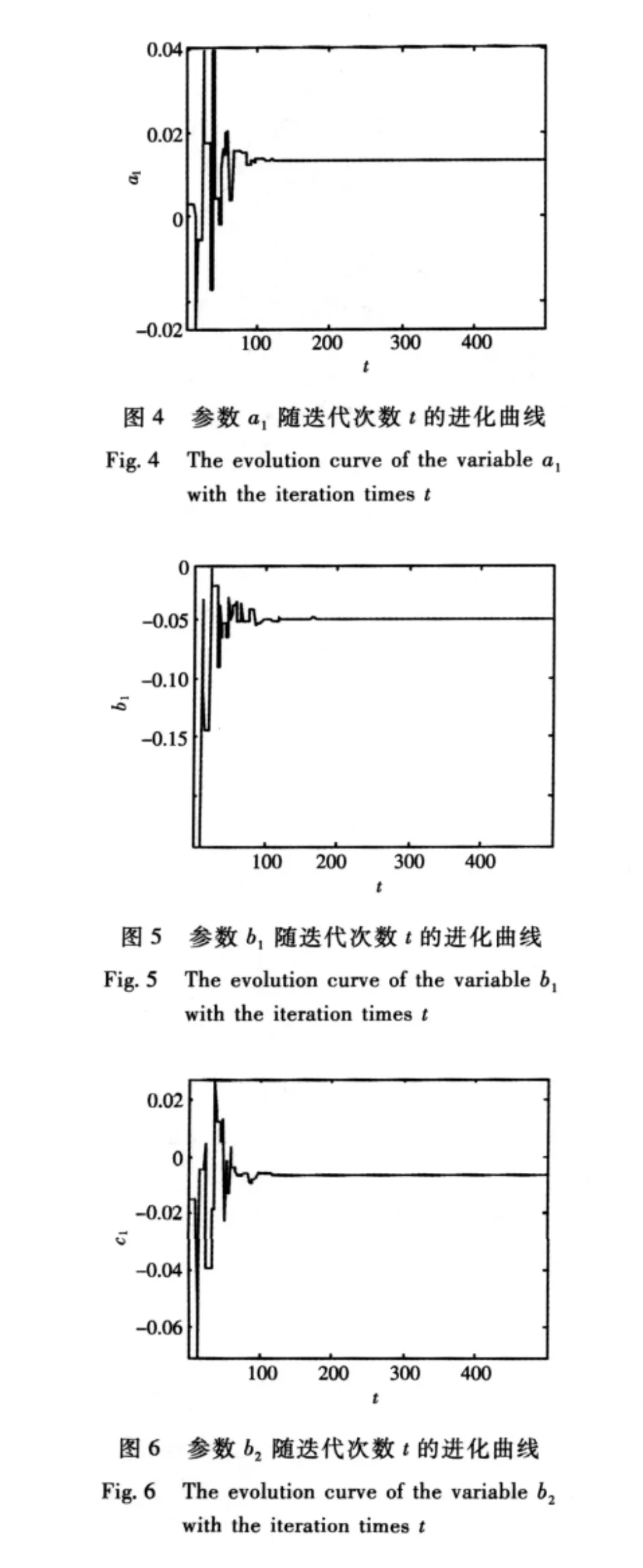
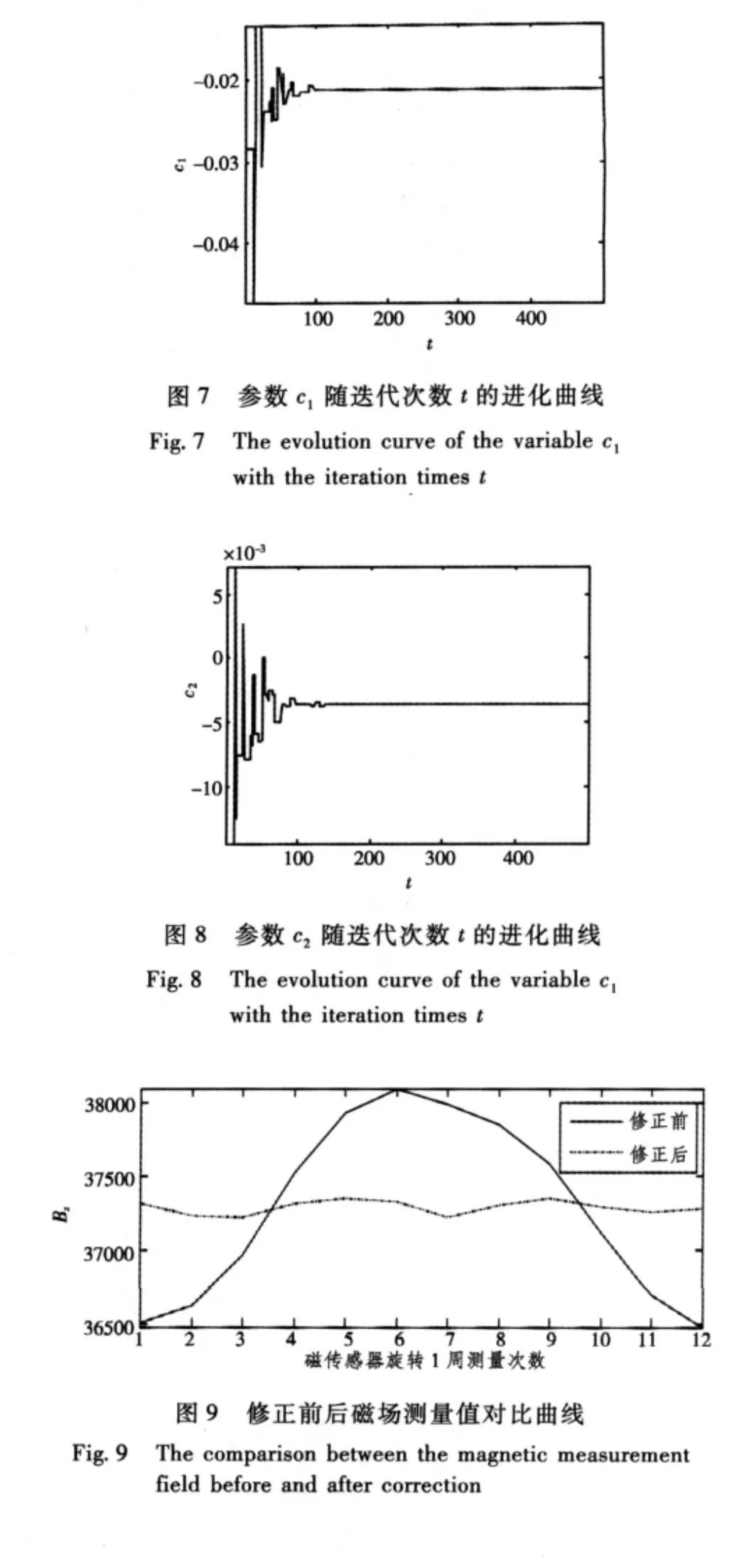
基于微分进化算法求解转化矩阵参数的过程如图3~9所示,所求得的参数为a1=0.013572,b1= 0.000115,b2=-0.006312,c1=-0.021201,c2=-0.003657。图3给出了目标函数值随迭代次数的变化关系。可以看出,经过100次迭代后目标函数值已基本稳定。图4~8分别给出了转化矩阵参数a1,b1,b2,c1和c2随迭代次数的变化关系。可以看出,转化矩阵参数都可较快收敛到稳定值。图9给出了三轴磁传感器在修正前z轴输出值与修正后z轴输出值的对比图。可以看出,通过修正可显著改善三轴磁传感器的测量精度。
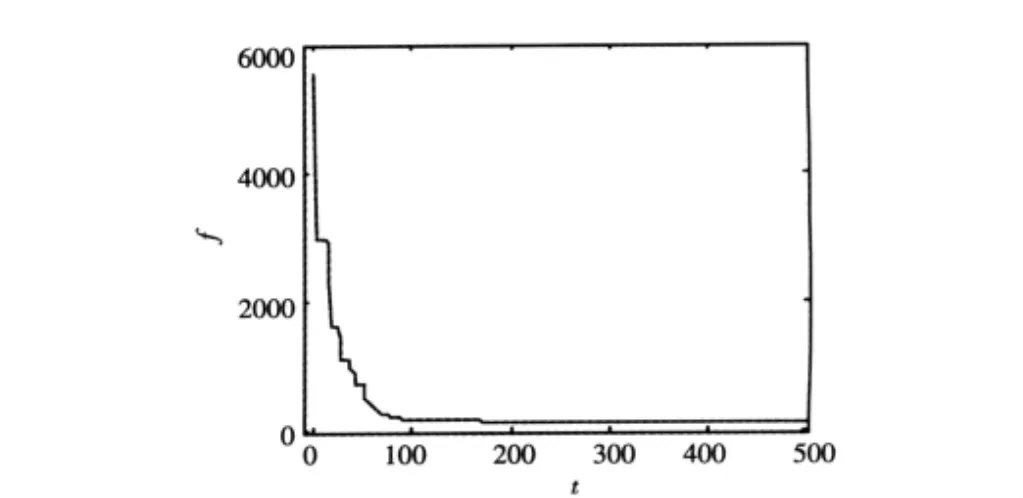
图3 目标函数值f随迭代次数t的进化曲线Fig.3The evolution curve of the object function f with the iteration times t
4 结语
本文提出了基于微分进化算法的三轴磁通门传感器非正交误差与非水平误差联合修正方法,与过去将非水平误差和非正交误差独立进行修正相比,该方法具有一定的优势。三轴磁通门误差消除实验表明了该方法可在一定程度上消除非正交性和非水平放置给测量带来的影响,从而显著改善磁场测量精度,具有一定的实用意义。
[1]潘启军,马伟明,赵治华,等.磁场测量方法的发展及应用[J].电工技术学报,2005,20(3):7-13.
PAN Qi-jun,MAWei-ming,ZHAOZhi-hua,etal.Development and application of measurement method for magnetic field[J].Transactions of China electrotechnical society,2005,20(3):7-13.
[2]涂疑,郭文生,曹大平.磁通门传感器的应用与发展[J].水雷战与舰船防护,2002,(1):36-38.
TU Yi,GUO Wen-sheng,CAO Da-ping.Application and development of magnetic fluxgate sensors[J].Mine war and ship protection,2002,(1):36-38.
[3]胡海滨,林春生,龚沈光.基于共轭次梯度法的非理想正交三轴磁传感器的修正[J].数据采集与处理,2003,18 (3):88-91.
HUHai-bin,LINChun-sheng,GONGShen-guang.Correction of incompletely orthogonal three axial magnetic sensor by conjugated approximate gradient algorithm[J].Journal of Data Acquisition&Processing,2003,18(3):88-91.
[4]肖昌汉,何华辉.三分量磁传感器非理想放置时磁场数据的分析方法[J].海军工程学院学报,1996,76(3): 7-12.
XIAO Chang-han,HE Hua-hui.An analysis method of magnetic field data from the non-idealy placed 3 axial magnetometer sensor[J].Journal of naval academy of engineering,1996,76(3):7-12.
[5]闫辉,肖昌汉,张朝阳.三分量磁通门传感器水平修正方法[J].电子测量与仪器学报,2006,20(6):90-93.
YAN hui,XIAO Chang-han,ZHANG Zhao-yang.Horizontal calibration to triaxial fluxgate magnetometer[J].Journal of electronic measurement and instrument,2006,20(6):90-93.
[6]郭志友,孙慧卿.磁传感器的非线性误差修正技术[J].传感器技术,2004,23(5):54-56.
GUO Zhi-you,SUN Hui-qing.Technology of non-linearity error revision on magnetic sensors[J].Journal of transducer technology,2004,23(5):54-56.
[7]孙慧卿,郭志友.传感器的误差补偿技术[J].传感技术学报,2004,3(1):90-92.
SUNHui-qing,GUOZhi-you.Technologyoferror compensation on sensors[J].Journal of sensor technology,2004,3(1):90-92.
[8]阳明盛,罗长童.最优化原理、方法及求解软件[M].北京:科学出版社,2006.140-151.
YANGMing-sheng,LUOChang-tong.Optimization principle,algorithm and solution softwares[M].Beijing: Science Press,2006.140-151.
[9]STORN R.Differential evolution,a simple and effcient heuristic strategy for global optimization over continuous spaces[J].Journal of Global Optimization,1997,11:341-359.
猜你喜欢
数学物理学报(2022年5期)2022-10-09
当代陕西(2022年6期)2022-04-19
黑龙江大学自然科学学报(2022年1期)2022-03-29
Journal of Palaeogeography(2022年1期)2022-03-25
快乐语文(2021年35期)2022-01-18
娃娃乐园·综合智能(2021年12期)2022-01-18
摄影之友(影像视觉)(2017年1期)2017-07-18
北京航空航天大学学报(2017年10期)2017-04-20
中学生数理化·高二版(2016年12期)2017-02-28
制导与引信(2016年3期)2016-03-20