
一种电感式位移测量装置的设计
2011-03-03 03:31江学焕关新钟蕾程福明
湖北汽车工业学院学报 2011年2期
江学焕,关新,钟蕾,程福明
(1.武汉大学 计算机学院,湖北 武汉 430072;2.湖北汽车工业学院 电气与信息工程学院,湖北 十堰 442002)
一种电感式位移测量装置的设计
江学焕1,2,关新2,钟蕾2,程福明2
(1.武汉大学 计算机学院,湖北 武汉 430072;2.湖北汽车工业学院 电气与信息工程学院,湖北 十堰 442002)
介绍了差动变压器式位移传感器的结构和原理,给出了电感式位移测量装置的系统设计方案。该系统通过FPGA产生稳定的DDS信号作为激励源,经差分电路输出2路平衡信号;通过过采样平均滤波的方法实现噪声抑制;采用线性拟合的方法对非线性数据进行补偿,实现了位移的精确测量,测量精度较高。
差动变压器;DDS信号;过采样;线性拟合
0 引言
目前,电感式位移测量装置应用非常广泛,可用于高精度工件的自动加工过程,也可用于外形尺寸自动测量系统。传统的电感式位移测量方法是由维恩电桥振荡电路产生激励信号,通过差分电路送往差动变压器主线圈。次级线圈感应的电压信号经过硬件放大、全波整流得到2路直流信号。再利用差分放大器实现2路信号相减。最终测量差动电压值得到位移量。其中,极性的判别运用相敏检波实现[1]。此方案精度不高,易受到外界信号的影响,硬件调试困难大。优点是成本低,易于集成。
为了提高系统的测试精度,增强抗干扰能力,本文拟采用改进激励信号产生电路的方法来解决这个问题。该方法是利用FPGA产生稳定的DDS信号送往全差分电路,差分电路将其输出的2路平衡信号传递给差动变压器的主线圈,差动变压器的次级线圈将感应到的信号放大、滤波后,送给真有效值转换,然后单片机A/D采集、计算处理得到位移量。该方法精度高、可以实现自动测量与控制。
1 电感式位移测量装置的设计
1.1 测量原理
差动变压器能将被测位移量转换为传感器线圈互感的变化量。其结构原理图如图1所示,等效电路图如图2所示。
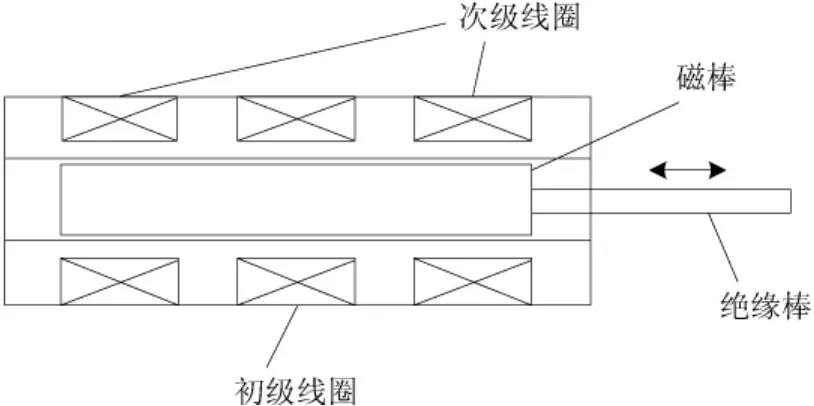
图1 差动变压器的结构原理图[1]
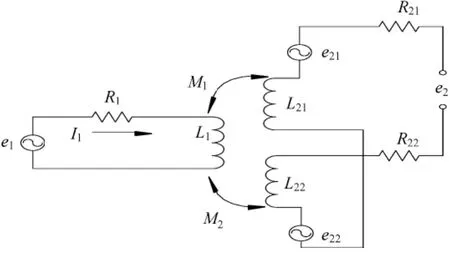
图2 差动变压器的等效电路[2]
e1假定初级线圈匝数为N1,两次级线圈的匝数为N,磁场强度为B,线圈横截面积为S;磁棒在移动过程中通过的匝数为ΔN。据图2分析,初级线圈激励电压
不变情况下:磁棒向L21移动时,次级线圈在L21方向感应的电动势

增加,L22方向感应的电动势

将逐渐减小到空心状态时的电动势。设磁棒在线圈中向前每移动Δl,磁棒向前移动一匝线圈的长度,则磁棒在线圈中移动位移ΔL即为ΔN(ΔL/Δl)匝。同时令K=jω2BS,可得到:


根据e1=e21+e22,研究(e21-e22)/e1可得:

令(e21-e22)/e1=d,得到:

依据式(4),可得位移量的变化与两次级线圈感应电动势之间存在线性关系,表明了差动变压器能够将机械位移量转化为与之成比例的电压信号。整个测量装置利用这一原理设计制作。
1.2 系统方案设计
根据测量原理分析,本系统主要由以下几部分组成:激励电路、线性可变差动变压器、放大滤波电路、真有效值转换电路和数据采集与处理模块。系统框图如图3所示。
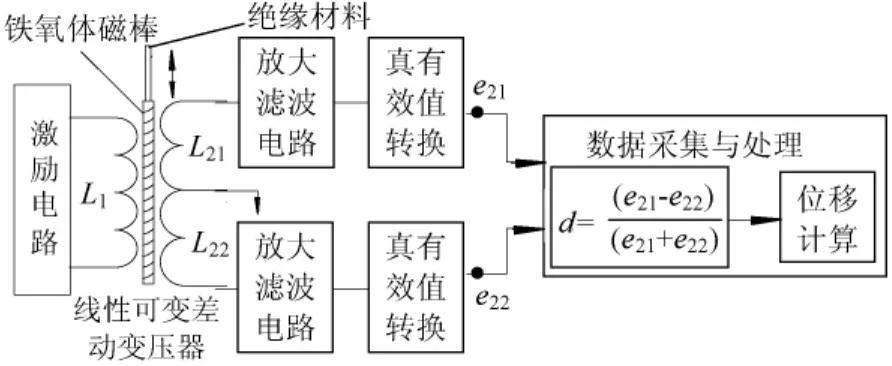
图3 系统方案框图
2 系统实现
2.1 硬件实现
2.1.1 硬件系统实现
硬件系统实现原理如图4所示,FPGA合成的DDS正弦波信号,经缓冲放大、滤波后,输入到差分放大模块,经其转换成差分信号放大后再输入到可变差动变压器初级,在变压器次级生成两路交流电压,经过放大、滤波后输入到真有效值转换模块,从而得到直流电压。该电压经单片机内部A/D转换后,通过线性拟合计算即可得到位移量。

图4 总体硬件结构图
2.1.2 差分电路设计
整个测量装置采用电感传感器,容易受到环境噪声的影响,因此选择TI公司的全差分集成电路THS4503。这种集成电路具有对环境噪声有很强的抑制能力、可以将单端输入信号转换为差分输出的特性。THS4503的主要性能特性如下:
1)全差分特性:应用于差分驱动和差分放大方面具有很大的优势;
2)宽频带:带宽可达370MHz;
3)高转换速率:2800V/μs。
经典的输出计算公式如式(5)~(6)所示[3]。
按照芯片资料给定的典型阻值,选择RT为56.2Ω,R2和R4为392Ω;依据放大倍数选择R1和R3的阻抗。设计过程中,差分放大电路的倍数选为1,选定R1为402Ω,R3为374 Ω;考虑到THS4503为宽带放大器,所以电源旁边选择就近放置滤波电容,并且在R2和R4处并联10 pf的电容来消除自激影响。设计的THS4503差分电路图如图5所示。

图5 THS4503差分电路
2.1.3 差动变压器设计
差动变压器的设计使用三节式绕法。其设计的性能指标通常有:量程、线性度、灵敏度、激励电压及激励频率等[4]。综合各参数的影响,采用Φ为0.1~0.2 mm漆包线绕制初级和次级线圈,绕制时满足次级线圈严格对称与初级线圈。整个差动变压器的设计参数如下:初级线圈电感为68.5μH,次级线圈电感为38.3 μH,激励电压选为峰峰值为1V的平衡信号。经过多次测试,此设计可以满足量程在±20mm线性度和灵敏度的要求。
2.1.4 单片机系统电路
单片机选用美国 Silicon LAB公司的C8051F120,这是一款高速单片机,采用流水线式操作,使用内部集成PLL时钟速度可以达到100MIPS,而且端口多,允许交叉配置;存储容量大,8kB RAM,128kB FLASH;集成定时器、捕捉/比较模块,可编程计数器/定时器,看门狗定时器,VDD监视器和温度传感器[5]。关键是该单片机内部集成PWM控制器、12位A/D和D/A,这些资源对于高精度采集和控制提供了极大的方便。单片机最小系统原理图如图6所示。
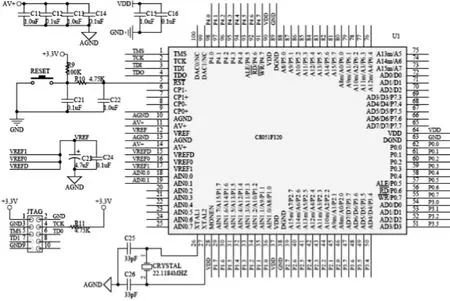
图6 C8051F120系统原理图
2.2 软件设计
2.2.1 总体流程
系统采用单片机实现控制A/D采集数据、计算位移量并显示、控制闭环回路工作等功能。系统流程图如图7所示。
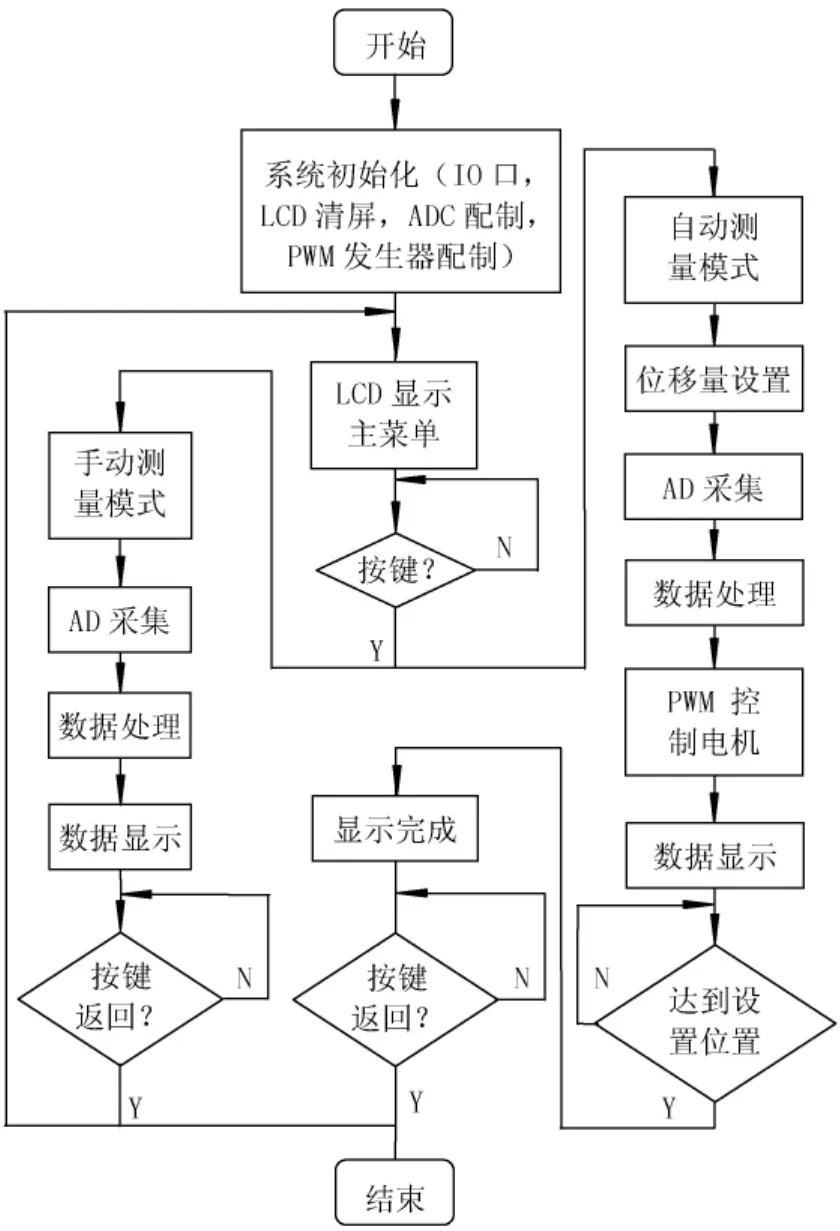
图7 系统软件流程图
2.2.2 采集算法
1)A/D采集精度计算


此时测量位移分辨率为0.01mm,完全可以满足本系统要求。
2)采集算法
为了降低噪声,提高系统精度和稳定性,这里采用了过采样平均滤波的办法。其基本原理为:按照Nyquist定理,在实际应用中,若信号带宽被限制在小于fs/2,以某个过采样比[OSR]对该信号采样,再对采样值求平均值(或抽取),然后得到结果输出数据。那么每增加一位分辨率或每减小6dB的噪声,需要以4倍的采样频率进行过采样,即增加测量分辨率的过采样频率为[6]

式中,fw为过采样频率;fs为采样频率;w为希望增加的分辨率倍数。
本系统为了提高分辨率,降低噪声,采用以牺牲CPU的运算速度和AD采样带宽为代价的过采样方法:利用256倍的Nyquist频率,采样精度达到了16位,从而减少了24 dB的噪声。
2.2.3 DDS信号的产生
DDS信号由FPGA产生,该信号具有频率分辨率高、输出信号相位噪声低、编程易实现、全数字化易集成、体积小等优点。其实现的框图如图8所示。

图8 DDS实现框图[7]
2.2.4 数据校正实现
单片机控制A/D采集转换后的2路直流电压信号VA和VB;根据公式

计算d值。以1mm位移量递增递减测量取多次d值,其对应位移的线性关系如图9所示。
理论d值与其对应位移呈线性关系,由图9可以看出d值线形图并非如此。d值线性度直接影响测量的精度,因此对表中的数据进行拟合处理。因为数据动态变化范围较小,所以采用线性插值的方法进行处理。
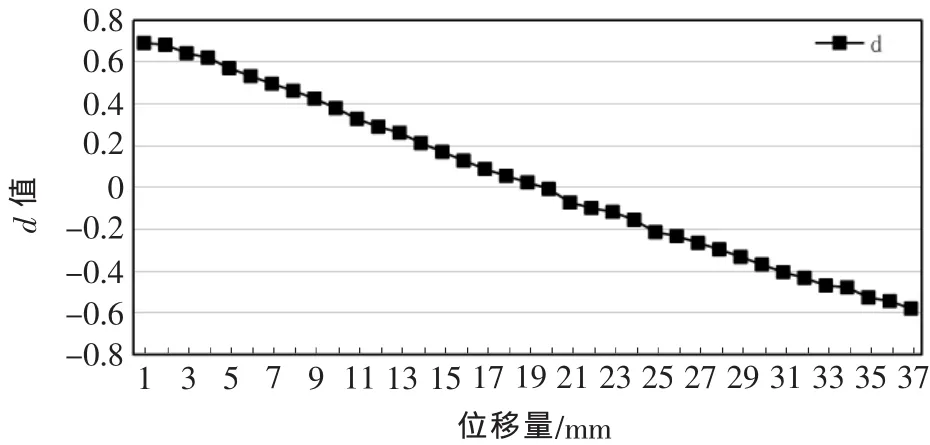
图9 d值与位移关系线形图
假定d值与所对应位移量s满足d=f(s),设ki是第i段直线的斜率则分段直线
采用非等距选取法选取基点。根据表的数据拟合得到式(9)。

式中,s=21处位移为0mm;s=1和s=41处位移分别为±20 mm。单片机根据式(9)计算出位移量,并在测量过程中修订ki与bi。最后得出精确位移量。
3 测试与性能分析
3.1 系统测试
1)差动变压器输出波形测试
利用数字示波器观察磁棒静止于零点位置和移动过程中两次级线圈的输出电压波形是否失真,输出有效值有无跳跃。经过测试,波形频率稳定,幅度无跳跃现象。
2)位移量的测量
调节磁棒位置,确定位移零点。推动绝缘棒使磁棒在线圈中移动,用游标卡尺测量磁棒运动位移,与单片机显示的位移进行比较。测试结果见表1。
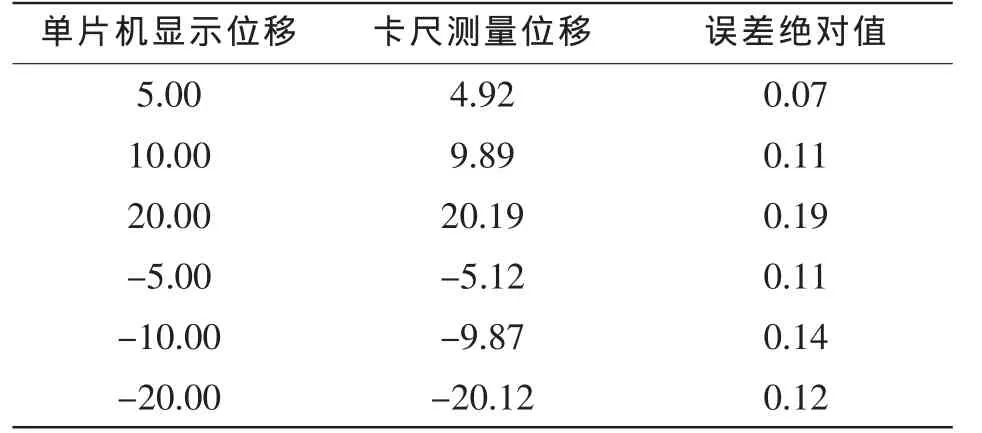
表1 位移量的测量 mm
3)自动闭环位移控制测量
用键盘预设位移量,使用游标卡尺测量直流电
机带动磁棒移动的位移,与预设位移进行比较。测试结果如表2所示。
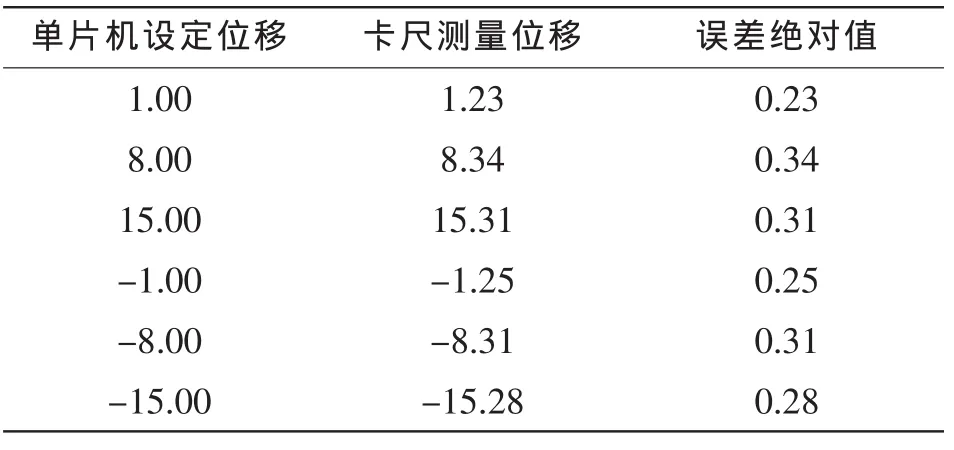
表2 自动闭环位移控制测量 mm
3.2 性能分析
磁棒的运动在差动变压器线性区间内,通过示波器的观察,两次级线圈感应信号都未发现波形有明显失真现象。用数字万用表观察交流信号经真有效值转换后的输出电压值也无明显跳动。整个系统经多次数据测试,达到了设计的预期效果,测量的位移范围能达-20~+20 mm,测量磁棒运动的位移精度高达0.2 mm,闭环位移控制精度高达0.5 mm。
4 结论
该系统测量范围可以达到-20~+20 mm,具有较高的测量精度。本系统的设计具有2个创新点:1)利用FPGA产生DDS信号,提高了信号的分辨率;2)采用过采样平均滤波的方法抑制噪声,提高采样精度。此外,借助于软件校正,该系统可以达到较高的测量线性度。
[1]常健生.检测与转换技术[M].北京:机械工业出版社, 2000.
[2]沈申生.差动变压器式位移传感器检测系统研究[J].传感器与微系统,2006,(3):41-43.
[3]Texas Instruments.THS4503 datasheet[EB/OL].[2011-02-27].http://focus.ti.com/lit/ds/symlink/ths4503.pdf.
[4]康华光,陈大钦.电子技术基础模拟部分[M].4版.北京:高等教育出版社,1999.
[5]Silicon LAB.C8051F datasheet[EB/OL].[2011-02-27].http://www.silabs.com/Support%20Documents/Technical-Docs/C8051F12x-13x.pdf.
[6]李锂,高丽.采用过采样和求均值法实现对温度的精确测量[J].新技术新工艺,2005(3):25-26.
[7]潘松,黄继业.EDA技术实用教程[M].2版.北京:科学技术出版社,2005.
[8]郑祥明,杨振野.一种快速精密位移测量电路的设计[J].湖北汽车工业学院学报,1998,12(4):49-52.
Design of Inductive Displacement Measuring Device
Jiang Xuehuan1,2,Guan Xin2,Zhong Lei2,Cheng Fuming2
(1.School of Computer,Wuhan University,Wuhan 430072,China; 2.School of Electrical and Information Engineering,Hubei Automotive Industries Institute,Shiyan 442002,China)
The structure and principle of differe ntial transformer-type displacement sensor were introduced,and the system design scheme of the inductive displacement measuring device was given.A stable DDS signal was produced by FPGA as the excitation source,and through differential circuit, two balanced signals were output.Noise suppression was achieved by the method of average oversampling filter.The nonlinear data was compensated by the linear fitting method,and then the accurate measurement of displacement with a high precision was realized.
differential transformer;DDS signal;over-sampling;linear fitting
TP216
A
1008-5483(2011)02-0046-04
2011-02-24
江学焕(1982-),男,湖北襄樊人,硕士生,主要从事嵌入式、汽车电子研究。
猜你喜欢
新世纪智能(数学备考)(2021年5期)2021-07-28
传感器世界(2021年2期)2021-03-27
制造技术与机床(2019年11期)2019-12-04
汽车文摘(2017年9期)2017-12-06
电子制作(2017年10期)2017-04-18
化工管理(2017年36期)2017-03-07
电子制作(2017年23期)2017-02-02
电测与仪表(2015年24期)2015-04-09
信息安全研究(2015年3期)2015-02-28
太空探索(2014年1期)2014-07-10
