
关于ePSF模型的一个注记
2011-02-28 05:10朱丽莎孟小华张庆丰
网络安全与数据管理 2011年12期
朱丽莎,孟小华,张庆丰
(暨南大学 计算机科学系,广东 广州 510632)
有效点扩散函数ePSF(Effective Point-Spread Function)方法是由ANDERSON等[1]提出的用于测量哈勃空间望远镜HST(Hubble Space Telescope)星象的方法,该方法消除了长期困扰HST图像测量的相位误差效应,是一种有效而准确的方法,不仅可以广泛用于欠采样图像的测量,甚至也可以用于非欠采样图像的测量[2,3]。该方法用于欠采样星象的测量,首先必须建立图像的ePSF模型,然后再利用该ePSF模型测量图像中星象的位置。因此建立准确的ePSF模型是该方法的关键。
建立准确的ePSF模型的基本原理是对不够精确的大量的单个星体的PSF模型逐渐精化得出统一的单个图像的ePSF模型。虽然原则上选择的星体越多得到的PSF模型应该越准确,但实际上星体越多,计算量越大,这将耗费大量的资源和时间,在实时观测中,这是不能承受的。此外,采样星体越多带来的噪声也越多,未必能够得到很好的ePSF模型。反之,如果星体数目很小,ePSF模型则将失去准确性,那么选择多少星体来得到该图像的PSF模型就是一个需要讨论的问题。本文对采样星体的个数和ePSF模型的准确性关系进行了研究,指出了模型网格的细密度对准确性更重要,这对天文测量的实践具有指导意义。本文首先介绍ePSF模型的计算过程和算法,然后详细介绍所做的实验,最后给出了实验结论。
1 ePSF模型计算方法
ePSF算法的第一步是计算ePSF模型,第二步是由该模型拟合星体的光通量分布确定星体的位置。第二步的重点是PSF模型的计算,步骤如下:
(1)从星象图中选取高性噪比的恒星作为采样星体。
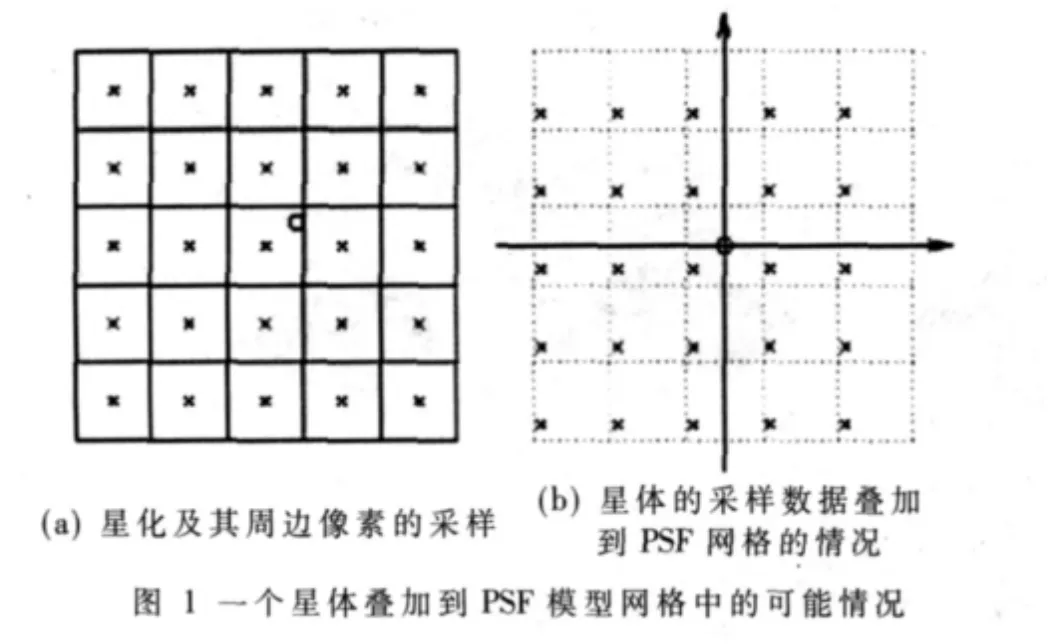
(2)获取采样星体中心周围m×m个像素的方形区域内的光通量分布(如图1所示),每个星体的中心一般来说并不是整数的像素位置,所以,星体的中心相对于PSF模型的网格中心会有偏差,如图1(a)所示,星体的中心(图中的圆圈)并不一定落在图中像素的中心(图中的×)。
(3)将被采样星体的区域叠加到PSF网格区域(图1(b)显示了一个星体的采样区域叠加于PSF网格区域的情况)。在ePSF方法中一个图像的PSF模型是用离散的规则网格点处的值来表达的,也就是说,PSF模型是一个离散网格模型。该方法认为,星象中的每个星体及其周边的像素的灰度值是对PSF模型的一个采样,星象中有多少星体,则对该星象的PSF模型采样了多少次。
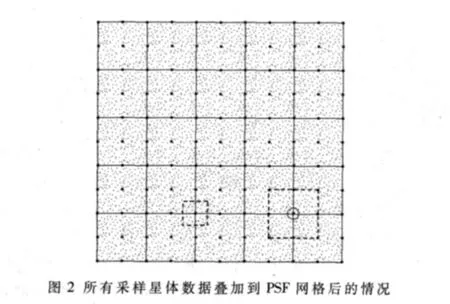
(4)当所有的采样星体及其周边像素值都叠加到PSF网格时,将得到如图2所示的情况(图中将PSF的网格进行了进一步的细分),在每个PSF的细小网格内,将有许多星体采样值,按照3σ准则,剔除异常采样后再取平均,即可得到所有PSF细小网格上的灰度值,从而可以得到准确的实际PSF网格模型。
以上四步结束后,在实际处理中为保证PSF网格模型的光滑与对称,还将采用一些措施对其进行光滑和网格中心位置的微调[1]。
2 实验步骤
因为真实图像的有效点扩散函数是未知的,所以计算出来的点扩散模型无法比较。本实验采用人工图像进行计算比较,包括3个步骤:(1)设定人工图像的有效点扩散模型,按照该模型随机生成若干星体,形成一个天文图像;(2)用第二部分所述的方法对人工图像进行PSF模型计算;(3)将设定的有效点扩散模型与计算所得的PSF模型进行比较,计算模型误差。
2.1 人工图像的生成
要生成人工图像,首先要生成一个天空背景图像,然后在此基础上叠加许多星体。首先生成一个分辨率为2 024×2 024的图像,该图像设定天空背景灰度为 500,并叠加Poisson噪声,以模拟真实天空背景。然后在这个图像上叠加了2 500个具有随机位置的星体。这2 500个星体的像素位置服从一种特殊的position分布,整数部分是随机的,分数部分服从0~1的之间均匀分布,即所有星象的像素相位是均匀分布的。因为是人工生成的星象,所以可将每个星象的像素相位位置理想化,以利于PSF模型的计算,从而确保每网格内包含指定数量的采样星体数据。
根据KING[4]的研究,星象的大部分通量都被包含在一个核中,这个核的灰度分布近似于Gaussian分布,或者接近于高斯函数,如Moffat函数等,这就是所谓的PSF函数。这里对于模拟星体的PSF函数采样经典的二维高斯模型,即星体周围每个像素点处的光通量f和星体的中心位置之间满足二维高斯关系模型,对于模拟图像来说,就是星体周围的灰度分布满足如下关系:

其中B代表背景;H代表高斯函数的峰值;R为高斯函数的标准差,它与视宁度有关(seeing≈2.355R);G(x,y)代表点(x,y)处的灰度值;(x0,y0)表示星体的中心位置。
实验中设定R=0.6369,即视宁度为1.5,因为ePSF方法是用于欠采样图像的一种有效方法,而视宁度为1.5的星象被认为是标准的欠采样图像。另外实验中H值在1 000~65 525之间随机取值,是为了保证每颗星体都有较好信噪比,可以作为有效采样星体。整体图像中每个星体还添加了Poisson噪声,这是在星象中最常见的噪声。最终生成的点扩散函数是已知的且像素相位均匀分布的星象图,以此作为实验的数据,所生成的图像局部如图3所示,整体与此相若。
2.2 进行ePSF模型计算时的影响因素
在ePSF方法中,ePSF模型也与网格的精细程度有关,假定单位像素划分为n×n个网格,n即标识了PSF网格的精细程度,实验中对不同精细程度的网格进行了考察,即分别考察了n取4,5,…,10等7种情况。计算出来的ePSF数值模型还与星体采样密度有关,用每网格内采样星体数据的数量k来标识采样密度。实验中对每一个 n值都考察了 k取 1,2,…,20等 20种情况,因为是人工生成星象,所以可以严格保证每网格内有要求数量的采样数据。

?
2.3 有效点扩散模型与所得PSF模型比较
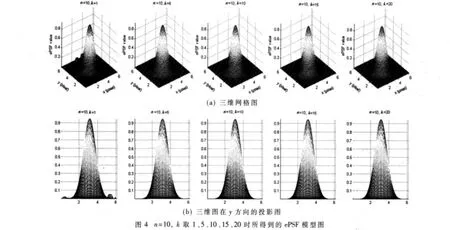
对 n、k不同取值总计 140种情况计算了 ePSF模型,并对这些模型数值进行了分析。图4所示为n=10时,将 k取值为 1、5、10、15、20时所得的 5个 ePSF模型图。其中图 4(a)是三维网格图,图4(b)是三维图在 y方向的投影图。
事实上每个PSF模型和准确Gauss模型都是有差别的,图 5显示了 n=10、k=5时所得 PSF模型和准确的Gauss模型的差别。图5是两者之差的三维网格图,可以看出其最大误差处在网格中心,其峰值很小不超过0.05。其他PSF模型和准确模型的差值图均与图5形状类似,当然其误差峰值不同,因此采用准确模型和计算的PSF模型之间的最大差值来衡量计算模型的误差。图4、图5大体反映了n=10时k取不同值所得的ePSF模型的情况及其误差情况。当n取其他值时也有类似的情况。
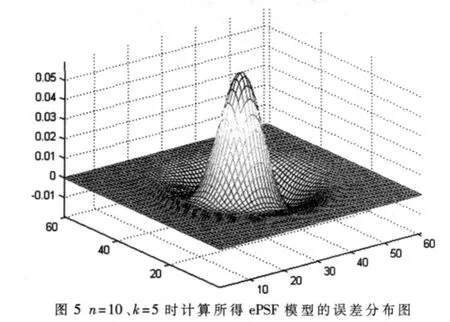
图6所示为 n、k取不同值时所得到 PSF模型的误差,表1是这些模型误差的数值表。
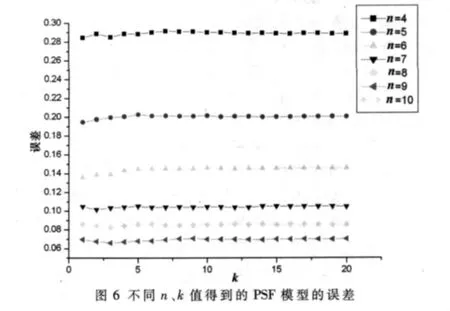
从图6可以看出,PSF模型的误差和网格的细密关系比较密切,网格越密,误差值越小,在网格固定的情况下,k取不同的值,模型误差变化不大。从表1的数据可以知道,对于固定的网格划分,k取不同值时,模型误差的绝对变化在0.01以内,相对变化在1%以内。理论上来说,k取值越大,相邻模型变化就越小,极限情况下,模型应该收敛到一个统一模型,这种极限模型称为稳定模型。一个网格划分对应一个稳定模型。从图6和表1可以看出,k取任何值,所得模型都很接近该网格划分对应的稳定模型,考虑到k取1时所得模型不够光滑,因此,认为k取2所得到模型很接近稳定模型。由此可以看出,在计算PSF模型时,网格的细密程度对计算模型的准确性影响很大,当网格划分固定后,只要保证每网格内有两个采样数据就可以得到稳定的模型。总体来说,采样星体数目达到2n2个就可以得到较好的稳定模型。
本文通过对模拟欠采样星象的处理实验,可知处理欠采样星象使用ePSF方法计算PSF模型时,每个网格的采样星体越多,计算结果越逼近一个稳定模型,这个稳定模型和真实模型的误差主要由网格划分的细密程度来决定,网格划分越密,模型误差越小。当网格划分固定时,每网格内有两个采样数据时即可得到一个较精确的稳定模型,即采样星体数目对ePSF网格模型的准确性影响不大。但在实际处理中,由于星体的相位差分布不均,因此平均每网格采样星体数目应该大于2。该结论在实际应用ePSF方法时,对更精确的建模有一定的指导意义。
[1]ANDERSON J,KING I R.Toward high-precision astrometry with WFPC2.I.Deriving an Accurate Point-Spread Function[J].PASP,2000,112:1360-1392.
[2]ANDERSON J,BEDIN L R,PIOTTO G,et al.Groundbased CCD astrometrywith wide field images I.Oberservations just a few years apart allow decontamination of field objects from members in two globular clusters[J].A&A,2006,454:1029-1045.
[3]张志渊,彭青玉.ePSF拟合法与Gaussian拟合法的比较[J].Astronomical Research&Technology,2010,7(2):132-139
[4]KING I R.The profile of a star image[J].PASP,1971,83:199-201.
[5]李展,彭青玉,韩国强.CCD图像数字定心算法的比较[J].天文学报,2009,50(3):340-348.
猜你喜欢
北京航空航天大学学报(2022年6期)2022-07-02
数学物理学报(2021年5期)2021-11-19
天津医科大学学报(2021年1期)2021-01-26
数学年刊A辑(中文版)(2020年1期)2020-05-19
数学物理学报(2019年5期)2019-11-29
动漫星空(兴趣百科)(2019年11期)2019-11-05
小学科学(2019年9期)2019-10-18
自动化学报(2017年5期)2017-05-14
光学精密工程(2016年1期)2016-11-07
诗林(2016年5期)2016-10-25
