一类混杂系统的预测控制设计
2011-02-03 03:05:00邹媛媛贾廷纲牛玉刚华东理工大学信息科学与工程学院上海0037上海电气集团股份有限公司中央研究院上海0003
电气自动化 2011年3期
邹媛媛 贾廷纲 牛玉刚(.华东理工大学 信息科学与工程学院,上海 0037;.上海电气集团股份有限公司中央研究院,上海 0003)
0 引言
分段线性(Piecewise Linear,PWL)系统作为一类基本的混杂动态系统模型,能够用来描述许多工程实际系统中的混杂特性,如饱和、继电器、死区等环节[1,2],也可以用来近似非线性系统。因此,对PWL系统控制问题的研究具有重要的理论和实际意义。
目前,预测控制已经被成功应用于 PWL系统[3-7],其中,PWL系统预测控制的稳定性综合问题是大家关注的焦点[5,6]。针对这个问题,本文对含有两个子系统的连续时间PWL系统进行预测控制器设计。首先,对每个子系统,设计有界控制器,在此基础上,提出一种预测控制和有界控制相结合的混合控制方法,并给出子系统之间的稳定切换规则,从而保证系统的全局稳定性。这种方法的好处是只需要对每个子系统求解二次规划问题,避免了对整个PWL系统求解含有逻辑变量的二次(或线性)规划问题,降低了算法的复杂度。
1 有界控制
考虑如下的连续时间PWL系统

其中,x(t)=[x1(t)…xn(t)]T∈Rn是状态向量,u(t)=[u1(t)…um(t)]T∈U⊆Rm是控制输入向量。U是输入约束,定义为U∶=系数矩阵分别为 Ai∈Rn×n,Bi∈Rn×m,i∈
考虑第i个子系统,设其Lyapunov函数为Vi=xTPix,存在满足Ricatti方程


其中
我们发现,如果状态轨迹满足如下条件

那么,根据Lyapunov理论,有界控制器(3)满足输入约束,并且Lyapunov函数是单调递减的。利用集合Φi(umax),可以构造一个包含在Φi(umax)的最大椭圆集作为稳定域

其中,cimax>0是满足Ωi(umax)⊆Φi(umax)的最大值。
对于系统(1)来说,稳定域估计集可以如下构造。假设S∶≜为状态分区的边界

其中,c'jmax是满足条件的最大值。则系统(1)的稳定域估计集

使得

其中,c'imax、c'jmax是满足条件的最大值。则含系统(1)的公共的稳定域估计集为(7)的形式,

定理1 考虑系统(1),对第i个子系统,通过构造Lyapunov函数Vi,得到该子系统的有界控制器(3),稳定域估计集Ψ。假设初始状态为 x0∈Ψi,i∈{1,2}。如果在时刻

那么状态切换到第j个子系统,反复此控制过程,可得闭环系统是渐近稳定的。其中是第r次离开第i个子系统的时间为第m次进入第j个子系统的时间为第m-1次进入第j个子系统的时间。
虽然定理1给出的有界控制策略能够保证闭环系统稳定,但是,有界控制对系统的最优性没有要求,因此在有界控制的作用下系统的控制性能较差。
2 混合预测控制
由于预测控制是在最优性能指标的情况下,求解满足系统状态和输入约束的控制律,因此,其具有良好控制性能。基于上述分析,本文将预测控制和有界控制相结合,在系统的稳定域估计集内,采用两种控制律切换模式以达到系统稳定性和最优性的兼顾。
2.1 子系统预测控制
针对系统(1)的每个子系统,设计相应的预测控制器。考虑第i个子系统,x(t)为系统在t时刻的状态,可以通过求解如下优化问题得到预测控制
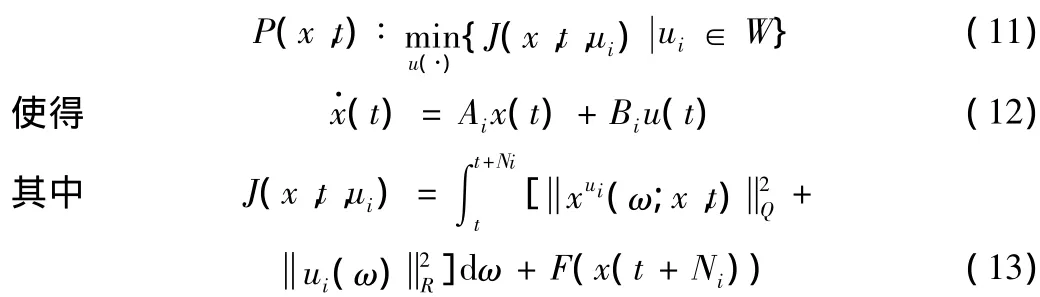
W=W(t,Ni)是一组由[t,Ni]映射到 U 的分段连续函数,Ni是预测时域,{ui[k]=ui(kT)}为要求的控制序列,满足:ui(·)∈W ,ui(t)=ui[k],t∈[kT,(k+1)T],T 为采样周期。xui(ω;x,t)是式(12)的解,Q和R是严格正定对阵矩阵,F是终端加权。
在时段[kT,(k+1)T]内,通过求解上述优化问题,可以得到一组预测控制序列。通常我们只采用第一个(·)∈W,即

作用到第i个子系统。
2.2 混合预测控制


3 仿真研究
为了验证混合预测控制的有效性,考虑下面例子


针对(17)描述的两个子系统,分别考虑对应的Lyapunov函数 xTPix。取,通过求解 Ricatti方程,可知

根据(7)的描述形式,系统(17)的稳定域估计集,预测控制目标函数的参数选择为 Q=2×I2,R=0.1,时域长度 T=0.4。取初始状态为x0=[23]T∈Ψ1,采用定理2提出的混合预测控制策略,闭环系统状态轨迹渐近到达原点。
4 结论
本文针对一类混杂系统,提出了一种保证闭环系统稳定性的预测控制策略。对每个线性子系统,分别设计相应的有界控制器,并在此基础上,基于子系统之间的状态切换条件构造出系统的稳定域估计集。在稳定域估计集内,给出有界控制和预测控制相结合的控制策略,保证了不同子系统之间切换的稳定性。
[1] SONTAG E.Nonlinear regulation:The piecewise linear approach[J].IEEE Transactions on Automatic Control,1981,26(2):346-358.
[2] 张聚.混杂系统理论及在非线性系统中的应用研究[D].浙江大学,2005.
[3] 邹媛媛,邹涛,李少远.混杂系统的预测控制.控制与决策,2007,22(4):361-365.
[4] 丁宝苍.预测控制的理论与方法[M].北京:机械工业出版社,2008.
[5] 曾锋,高东杰,李秀改.一类有约束的分段线性系统双模预测控制.控制与决策,2006,21(5):597-600.
[6] ÖZKAN L,KOTHARE M V,GEORGAKIS C.Model predictive control of nonlinear systems using piecewise linear models[J].Computers and Chemical Engineering,2000,24(2-7):793-799.
[7] LAZAR M,HEEMALS W P M H.Predictive control of hybrid systems:Input-to-state stability results for sub-optimal solutions[J].Automatica,2009,45(1):180-185.
[8] El-Farra N H,Mhaskar P,Christofides PD.Uniting bounded control and MPC for stabilization of constrained linear systems[J].Automatica,2004,40(1):101-110.
猜你喜欢
数学年刊A辑(中文版)(2023年4期)2024-01-04 05:47:40
数学物理学报(2021年5期)2021-11-19 07:01:32
数学物理学报(2021年4期)2021-08-30 08:28:06
数学物理学报(2020年4期)2020-09-07 09:14:50
数学物理学报(2019年3期)2019-07-23 01:15:30
黑龙江电力(2017年1期)2017-05-17 04:25:05
环境科技(2016年5期)2016-11-10 02:42:12
福建中学数学(2016年4期)2016-10-19 05:09:02
振动工程学报(2015年2期)2015-03-01 01:16:10
系统工程学报(2015年2期)2015-02-28 19:53:43