振动传感器随机校准方法和正弦校准方法的比较
2011-01-27 09:17:04付茂岳
航天器环境工程 2011年3期
付茂岳,郭 凯
(北京东方计量测试研究所,北京 100029)
0 引言
振动传感器的校准方法分为绝对法和相对法[1-2],绝对法主要应用于量值传递和少数对精度要求较高的计量机构。在日常的校准工作中,相对校准方法的应用是比较广泛的;其中随机校准方法和正弦校准方法是应用比较多的两种方法,而前者较后者为新。目前,一些比较权威的计量机构和军工实验室在校准振动传感器时都采用这两种校准方法,而在国内应用较为广泛的则是相对传统的正弦校准方法。
正弦校准方法是在同一时间内获得某一固定频率点上的灵敏度值,然后把这些单点的灵敏度值连接成灵敏度曲线;而随机校准方法是同时在整个频段范围上进行校准,通过多次平均的方法得到整个频段范围上振动传感器的灵敏度值。
1 本实验室振动传感器校准设备及相应技术指标
本实验室在实现振动、冲击等参数的校准方面有着先进的技术手段。现有SPEKTRA振动传感器校准设备一套,包括能够校准超低频设备的低频校准系统CS18 VLF(如图1所示),该系统能够覆盖的频率范围为0.2~200 Hz:当频率低于63 Hz时,示值重复性误差小于±0.1%;当频率高于63 Hz时,示值重复性误差小于±0.5%。还包括能够校准高频设备的高频校准系统CS18 HF(如图2所示),该系统能够覆盖的频率范围为5Hz~20 kHz:当频率低于5kHz时,示值重复性误差小于±0.1%;当频率高于5Hz时,示值重复性误差小于±0.5%。

图1 CS18 VLF振动台Fig.1 CS18 VLF shaking table

图2 CS18 HF振动台Fig.2 CS18 HF shaking table
2 正弦校准方法和随机校准方法的校准数据比较
首先,对某批可能存在问题的传感器之一(传感器a)进行正弦校准[3-4],在5Hz~10 kHz的频段范围内取54个频率点,得到灵敏度曲线,如图3所示。然后,用随机校准方法校准[3-5]传感器a,得到灵敏度曲线(如图4所示)。本实验室随机校准方法校准的频带范围为16 Hz~5kHz,共4985个频率点,频率分辨率为1 Hz。再分别用正弦校准方法和随机校准方法对传感器b进行校准,得到正弦校准灵敏度曲线和随机校准灵敏度曲线(如图5、图6所示)。因为本实验室随机校准方法的最低频率点是16 Hz,所以把该次正弦校准的频率下限设置为16 Hz,以便更好地进行比较。
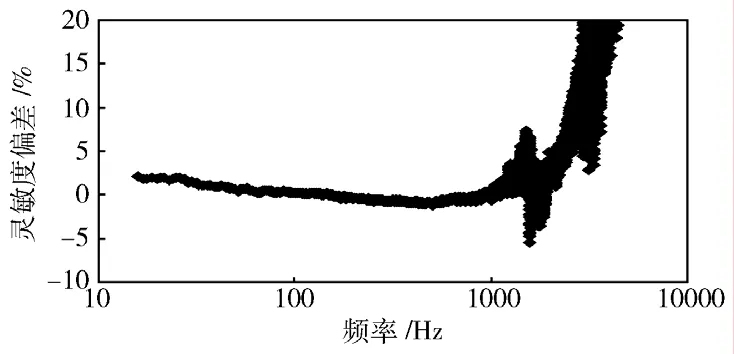
图4 传感器a的随机校准灵敏度曲线Fig.4 Random calibration sensitivity curve for vibration sensor a
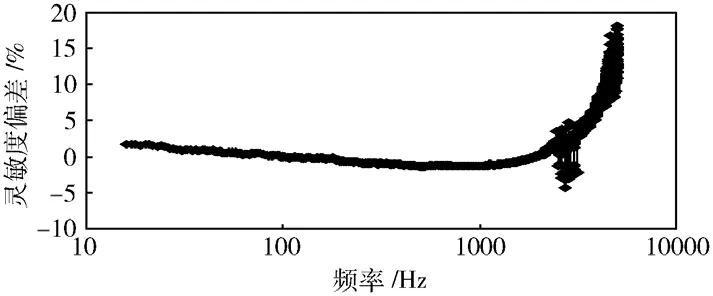
图6 传感器b的随机校准灵敏度曲线Fig.6 Random calibration sensitivity curve for vibration sensor b
如图3所示,传感器a灵敏度曲线正常。按照试验数据,该传感器灵敏度误差在±5%以内的频带范围约为5Hz~5.5kHz。但是,从图4中可以看到该传感器存在严重问题,应该立即停止使用。
如图5所示,传感器b的灵敏度曲线基本正常。按照试验数据,该传感器灵敏度误差不超过±5%的频带范围约为16 Hz~5.5kHz。但是,从图6中可以看到传感器b的灵敏度曲线存在波动,即传感器b存在问题。
分析图3~图6可知,在振动传感器的校准中,随机校准方法发现问题的能力要优于正弦校准方法。
对上述两个传感器进行正弦校准时,取50个点左右进行单点校准,单个传感器的校准时间约在5min左右;而进行随机校准时,设置平均次数为30次,校准频率点个数5000左右,频率分辨率为1 Hz,单个传感器的校准时间约在4.5min左右,所需时间大致相当。
在对图6和试验数据的观察、分析中,可以发现传感器b的灵敏度曲线在2.5kHz以上存在波动,这些波动在图5中没有得到特别清晰的体现。在进行正弦校准时,所选频率单点的跨度是比较大的,那么是否因为所选频率单点跨度较大而略过了这些波动呢?下面,通过在某一固定频段范围内多取频率点的方法来探讨这个问题。
对传感器b重新进行正弦校准试验,在2.5~3.5kHz之间取90个点,通过多取频率点减少单点跨度的方式重新进行试验,得到灵敏度曲线如图7所示。
如图7所示,经过增加正弦校准的被校频率点数,可以发现该传感器在某个频段范围内灵敏度存在大的波动,确实存在严重问题,应该立即停止使用。
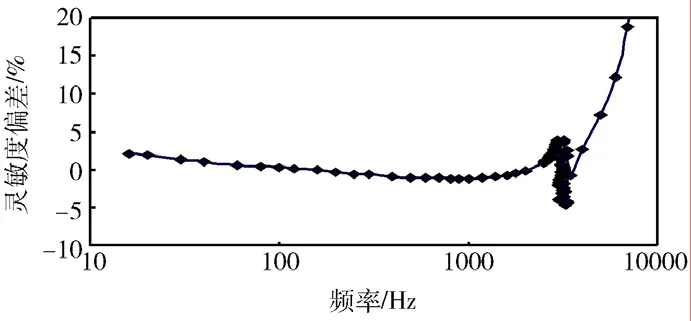
图7 传感器b的正弦校准灵敏度曲线(增加频率点)Fig.7 Sine calibration sensitivity curve of vibration sensor b(by adding more points)
在3200~3220 Hz频段范围内针对传感器b进行的随机校准结果和正弦校准结果进行比较,结果如表1所示。
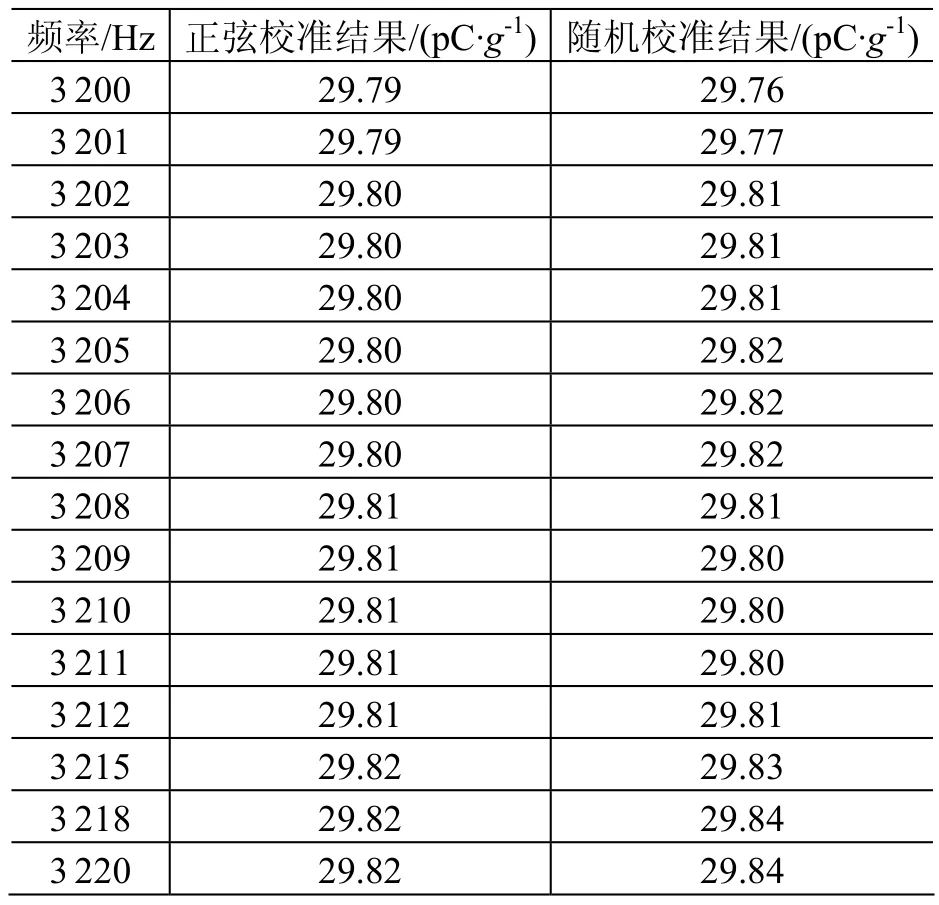
表1 传感器b的正弦校准结果和随机校准结果的比较Table 1 Comparison between sine calibration and random calibration of sensor b
考虑到振动测量系统的不确定度和两种方法准确度的差异,可以认为针对传感器b的随机校准结果和正弦校准结果是吻合的。但是这种增加被校点数的正弦校准方法需要花费大量的时间。本实验室通过多次试验发现,取150个被校点需要耗时15min左右,而且在这150个被校点中,至少要有100个集中在可能出现问题的频率范围内,才能较为准确地反映传感器存在的问题。也就是说,必须要对传感器出现问题的频率范围进行预判,然后在该范围内选择大量的被校点进行校准。如果无法预判该频率范围,那么只能在5Hz~20 kHz内选择足够数量的频率点进行校准,因此在批量校准传感器时单独使用此方法显然不具备很好的可操作性。而利用随机校准方法在同样的时间内,得出的校准数据点数比正弦校准方法的数据点多,即频率分辨率高,从而能够发现被校传感器出现问题的频段。
依据上述分析,在这里提出一个相对可行、稳妥的校准方法,即:利用随机校准方法在发现问题的能力上要优于正弦校准方法(随机校准方法是在整个频段范围内同时对传感器进行校准,校准人员可以逐点了解传感器的灵敏度值),对未知传感器先用随机校准方法进行校准;如发现该传感器可能存在问题,则可以利用正弦校准方法准确度较高的优势,在随机校准方法发现问题的频段范围内多设频率点进行正弦校准,从而进一步详细了解问题所在并对随机校准的结果作出验证。
3 结论
对振动传感器来说,随机校准方法无论从发现问题的能力、便利程度以及可操作性方面都优于传统的正弦校准方法,这也是目前国际上众多权威计量机构使用随机校准方法的原因。而鉴于正弦校准方法在准确度方面的优势,作者提倡校准振动传感器时首先运用随机校准方法进行校准,判断传感器有无问题;如果存在问题,再利用正弦校准方法作进一步的验证。
在此,建议计量机构和重要试验室在条件允许的情况下,在校准振动传感器时将随机校准方法和正弦校准方法相结合,从而保证校准的有效性。
(References)
[1]邹东东, 贾叔仕, 孙月明, 等.振动传感器宽频校准方法介绍[J].仪器仪表学报, 1998, 19(2): 20-26
[2]国防科工委科技与质量司.力学计量[M].北京: 原子能出版社, 2002: 646-649
[3]中国计量科学研究院, 中国航天科技集团公司第一计量测试技术研究所.压电加速度计检定规程[M].国家质量监督检验检疫总局, 2008: 3-8
[4]Deierlein, Dr.Buehn, Schmidt.Documentation software CS18[M].Environmental Testing, Germany, 2007-03-23:41-49
[5]胡志强, 法庆衍, 洪宝林, 等.随机振动试验应用技术[M].北京: 中国计量出版社, 1996: 42-50
猜你喜欢
中学生数理化·高一版(2023年3期)2023-03-23 01:34:42
新高考·高三数学(2022年3期)2022-04-28 08:41:42
地震研究(2021年1期)2021-04-13 01:04:56
制造技术与机床(2018年12期)2018-12-23 02:40:50
中学生数理化·高一版(2018年6期)2018-07-09 06:00:56
成都信息工程大学学报(2017年1期)2017-07-21 14:14:11
CHIP新电脑(2016年3期)2016-03-10 14:07:52
探测与控制学报(2015年4期)2015-12-15 15:00:48
中国新通信(2015年1期)2015-05-30 10:30:46
电测与仪表(2015年16期)2015-04-12 00:44:26