地平式望远镜轴系误差对指向精度和跟踪精度的影响*
2011-01-25 07:53顾伯忠
天文研究与技术 2011年2期
马 锦,顾伯忠
(1.中国科学院国家天文台南京天文光学技术研究所,江苏 南京 210042;2.中国科学院天文光学技术重点实验室,江苏 南京 210042;3.中国科学院研究生院,北京 100049)
天文光学望远镜是大型高精密仪器,综合应用当代光学、精密机械和精密控制的最新技术和成果,它是天文学家用来观测天空星体、探索宇宙奥秘的重要设备。高性能的天文望远镜除了要有好的光学系统,还要有稳定、高精度的指向和跟踪系统[1]。随着望远镜对口径的要求越来越大,地平式望远镜成为现代望远镜的主流,而研究影响望远镜指向精度和跟踪精度的因素是改进望远镜精确定位的重要课题。望远镜的指向误差由很多因素造成的,包括大气折射、望远镜的制造和装配误差、望远镜的重力变形以及因为温度变化引起的变形误差,望远镜的结构因素包括轴系的误差、镜筒的弯沉、叉臂或轭架的变形等等都会影响望远镜的指向误差[2]。在所有的误差原因中绝大多数均有特殊的规律,它们具有重复性的特点,但是即使有规律的变化因素,其表现形式以及反映在指向误差上的贡献仍然很难掌握。本文以2米级地平式望远镜为例,应用球面几何的方法建立模型分析轴系结构位置误差对天文望远镜指向精度和跟踪精度的影响,为轴系精度及轴系位置要求提供理论依据,为后续的控制修正提供参考数据模型。
1 轴系位置误差对指向、跟踪精度影响的理论分析
仅考虑轴系结构位置误差引起的指向、跟踪误差,两者其实是一致的,只是轴系工作状态不同,指向需要是高速、大角度范围,而跟踪是低速、小角度范围。误差产生的机理和计算公式相同,单位角度范围内产生的误差值相同。
当轴系之间为理论位置时,方位轴转过角度A,高度轴转动角度E,光轴精确指向需要观测的目标天体T,当存在轴系误差时,方位轴和高度轴分别转过相同角度,则光轴指向的位置为T',此时指向误差即为T'T。下面分析轴系误差对地平式望远镜指向、跟踪精度的影响。
当高度轴水平误差为α,方位轴垂直误差为β时,如图1,∠ZOP=α,∠ZOZ'=β。因为方位轴垂直误差方向可能是任意方向,所以Z'所在的位置是以Z为圆心,弧ZZ'为半径旋转的某位置,如图1中靠近Z点的虚线轨迹。现以Z点、Z'点和P点在同一段大圆弧上为初始位置,Z'实际位置为绕Z点顺时针转过角度γ。
在天文ΔZZ'P中,根据余弦定理得:

根据正弦定理得:

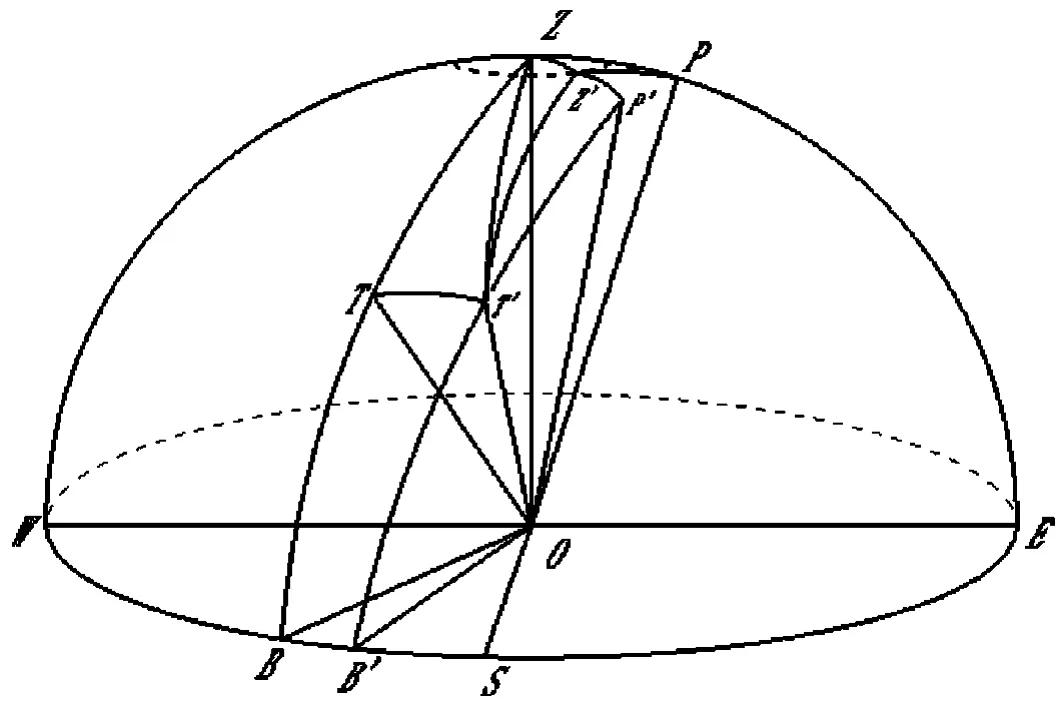
图1 轴系误差对指向精度影响Fig.1 The effect of the shaft error on the pointing accuracy
在天文ΔT'Z'P'中,有关系∠T'P'Z'=90°-∠ZPZ',Z'P'=Z'P根据余弦定理得:

根据正弦定理得:

在天文ΔT'Z'Z中,有关系∠T'Z'Z=360°-∠ZZ'P-A-∠T'Z'P'根据余弦定理得:

根据正弦定理得:

在天文ΔSZS'中,根据余弦定理得:

根据(1)、(3)、(6)求出的TZ值、T'Z值和∠T'ZZ'值代入(7),即可求出轴系综合误差对指向误差的影响。
2 轴系位置误差检测及数据处理
2.1 方位轴垂直误差的检测及数据处理
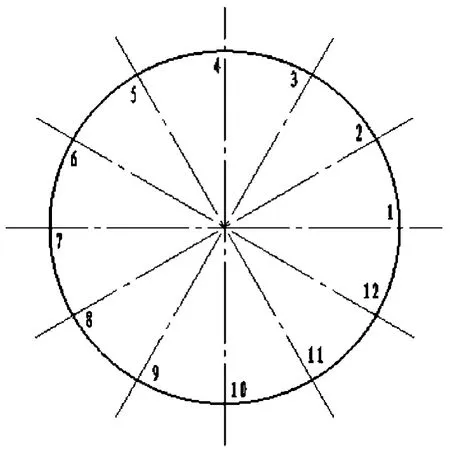
图2 水平度测量图Fig.2 Measurement chart of levelness
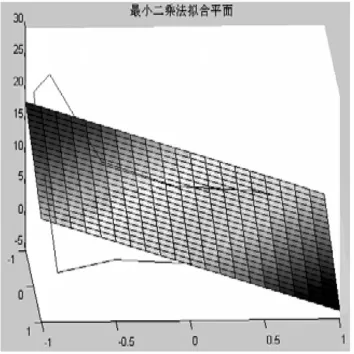
图3 根据最小二乘法拟合数据Fig.3 Data constructed according to the Least-squares fit

表1 底座油垫面测量值Table 1 Measurements of the surface of the oil mat on the base
2.2 高度轴水平误差的检测及数据处理

图4 高度轴水平度检测图Fig.4 Illustration of the detection of levelness of the altitude axis
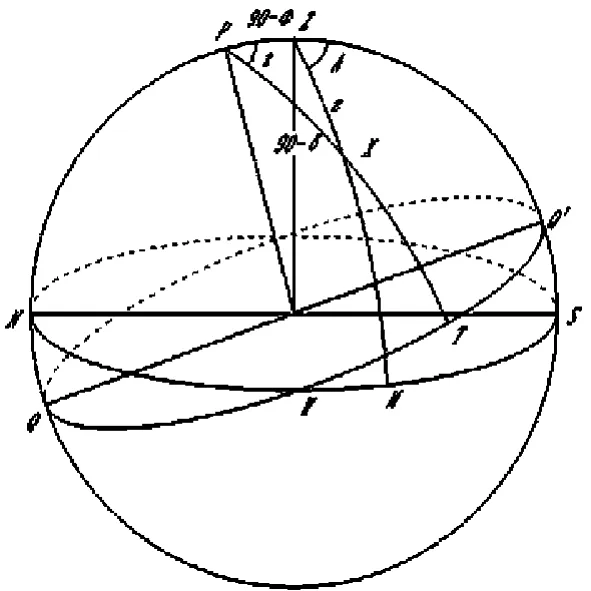
图5 赤道坐标和地平坐标的变换图Fig.5 Illustration of the transformation between the equatorial coordinates and the altazimuth coordinates
如图4,在高度轴A,B两端的外侧与内侧分别架上十字丝,通过转动中间块使得4个十字丝分别调到各轴头的旋转中心。然后利用调好中心的前后两个十字系丝,将自准直测量望远镜准直到该轴头的旋转轴线上[3],先准直到A轴头记下测量望远镜自身的位置值,再准直到B轴头,此时测量高度轴A、B两头十字丝的高低差即为高度轴水平差。自准直仪的刻度为0.02 mm,测量出的高低差为一格,即为0.02 mm,换算得高度轴水平误差近似为1.1″。
3 建模仿真
建立了轴系位置误差对指向精度的模型,根据实际检测出的2米级地平式望远镜轴系位置误差代入已建立模型中进行指向、跟踪仿真。
3.1 赤道坐标与地平坐标之间的转化
以上分析均基于地平坐标系而言,而天体的坐标以赤道坐标表示,在对目标星体的位置坐标及运行轨迹做指向和跟踪的建模仿真时必须把坐标值从天球坐标系转化到地平坐标系。
如图5,X为观测目标,设已知赤道坐标里赤纬δ和时角t,求地平坐标[4]里天定距z和方位角A:
在天文三角形ZPX中,以边z和A角为主;
根据余弦公式得 cosz=cos(90°-φ)cos(90°-δ)+sin(90°-φ)sin(90°-δ)cost,即:


以及第一五元素公式可得

在观测地点的纬度已知,天定距z和方位角A就可以唯一确定了。
3.2 指向误差的仿真
找一组分布于天球的若干目标,转动方位轴和高度轴使光轴依次指向不同目标星体,由于轴系之间存在位置误差,每颗星的实测位置与期望位置存在一定偏离,即为指向误差。在地平坐标系中采用方位角 (θ°~360°)每隔75°,高度角(天顶距10°~70°)每隔10°作为观测位置,统计偏离数据见表2。由表2可以看出,在方位轴垂直误差与高度轴水平误差分别在1″左右时,其对望远镜在全天区范围内指向误差贡献最大值为3.3″。
3.3 跟踪误差仿真
选择观测地理纬度为40°,分别对赤纬从10°~80°,每隔10°作一次连续24 h跟踪次仿真,每隔1 s记录一次数据,仿真流程如图6。节选赤纬为60°和30°跟踪误差仿真图如图7~8。图7和图8分别为轴系综合误差,赤纬为60°和30°时跟踪误差的仿真图。

图6 跟踪精度程序流程图Fig.6 Flowchart of the program for tracking precision

表2 观测位置的指向误差Table 2 Pointing errors at different directions

图7 赤纬为60°跟踪误差Fig.7 Tracking error at Declination 60°

图8 赤纬为30°跟踪误差Fig.8 Tracking error at Declination 30°
根据上述仿真图形得(其余具有相同的规律,具体数据如表3)得:在做24 h连续跟踪时,跟踪误差具有周期性;方位轴的垂直误差对跟踪精度影响较高度轴水平误差对跟踪精度的影响大;在地方纬度和赤纬之和为90°是跟踪误差的均方根值最大,变化最剧烈,赤纬增大或者减小跟踪误差值变化趋于平缓。

表3 轴系位置误差引起跟踪误差Table 3 Shaft position error caused by the tracking error
选择地方纬度为40°时观测,由上面推论得:赤纬为50°时跟踪误差变化最剧烈。现分别在变化最剧烈时作1 min、10 min的短周期开环跟踪和2 h长周期闭环跟踪,仿真图形如图9~11。
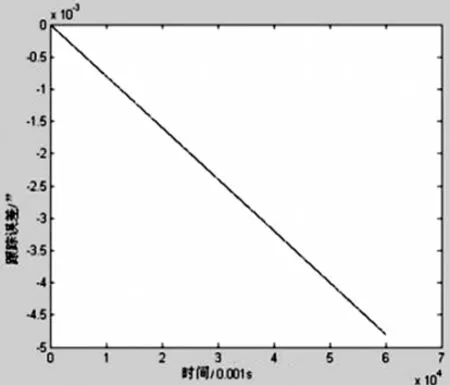
图9 跟踪1 min仿真图Fig.9 Simulated tracking errors within one minute

图10 跟踪10 min仿真图Fig.10 Simulated tracking errors within ten minutes
分析仿真数据可以得到当轴系位置误差在1″左右时,其对跟踪、指向的影响结果如下:
(1)全天区指向,可能出现对指向误差最大贡献值(方位角变化360°,高度角变化90°) 为3.3″;
(2)跟踪误差变化最剧烈时,1 min内对跟踪误差的贡献值RMS为0.0014″;
(3)跟踪误差变化最剧烈时,10 min内对跟踪误差的贡献值RMS为0.015″;
(4)跟踪误差变化最剧烈时,2 h内对跟踪误差的贡献值RMS为0.149″。

图11 跟踪2 h仿真图Fig.11 Simulated tracking errors within two hours
4 结论
当轴系位置误差在1″左右时,其对指向的影响比较大,需要控制系统在指向模型中加以校正;而对与小于10 min的短周期开环跟踪,其影响非常小,可以忽略;对于长周期闭环跟踪,其产生的误差将被导星系统加以校正,其影响也可以忽略。
如若把轴系位置误差放大一倍,指向误差最大为6.27″,小于实际轴系误差对指向误差贡献的2倍。跟踪误差变化最剧烈时,不同跟踪时间对跟踪误差的贡献如表4,相当于实际轴系误差对跟踪误差贡献的两倍,其对跟踪精度造成的影响仍然可以忽略。

表4 轴系误差放大一倍跟踪均方根值Table 4 RMS of tracking when the shaft error is doubled
[1]王国民.天文光学望远镜轴系驱动方式发展概述 [J].天文学进展,2007,25(4):364-374.Wang Guomin.Review of D Rive Style for Astronomical Optical Telescope[J].Progress in Astronomy,2007,25(4):364 -374.
[2]程景全.天文望远镜原理和设计 [M].北京:中国科学技术出版社,2003:118-119.
[3]翟嘉,胡企千,吴金虎.地平式望远镜高度轴回转精度检测与计算方法 [J].机械制造,2008,46(3):65-67.Zhai Jia,Hu Qiqian,Wu Jinhu.Rotary Precision Detection of Altitude Axis and Calculation Method of Alt-Az Telescope [J].Machinery,2008,46(3):65-67.
[4]戴文赛.天文学教程 [M].上海:上海科学技术出版社,1961:104-105.
猜你喜欢
防爆电机(2022年3期)2022-06-17
中学生数理化(高中版.高考数学)(2021年6期)2021-07-28
小学阅读指南·低年级版(2021年5期)2021-05-28
船舶标准化工程师(2019年4期)2019-07-24
传媒评论(2017年8期)2017-11-08
广东第二课堂·小学(2017年2期)2017-02-20
舰船科学技术(2016年1期)2016-02-27
船海工程(2015年4期)2016-01-05
视野(2012年2期)2012-07-26
中国科技术语(2012年3期)2012-03-20