
护士机器人的系统设计及机构参数仿真优化
2011-01-16 08:25:54辛绍杰张欢欢
上海电机学院学报 2011年6期
辛绍杰,张欢欢
(上海电机学院 机械学院,上海 200245)
护士机器人的系统设计及机构参数仿真优化
辛绍杰,张欢欢
(上海电机学院 机械学院,上海 200245)
针对自理困难的家居老人和病人的需要,设计了一款护士机器人。该机器人移动平台和机械系统的控制系统采用基于工控机的运动控制方案。运用三维设计软件SolidWorks对该机器人的机械系统进行了三维建模、装配以及干涉检查。分别以操作手的拇指转动角速度和大臂轴输出转矩最大值的最小化为优化目标,利用ADAMS软件对机器人操作手机构和手臂机构进行了运动参数仿真优化。结果表明,优化后的构件尺寸极大地改善了护士机器人的机械性能。
护士机器人;结构设计;控制系统;干涉检验;优化设计
对于自理困难的老年人和由突发事故引起行动不便患者的护理已成为当今人们广泛关注的社会问题之一。据有关资料统计,仅国内需要康复护理器械的患者就有1 500多万人[1]。目前的康复产品大部分功能单一或价格偏高,且不能人性化地满足病人的使用需求,而功能齐备、操作方便、安全可靠的服务机器人等相关产品将在很大程度上促进病人康复,减轻护理强度。针对老年人和病人的需要,设计了结构简单、工作可靠、使用方便的一款护士机器人,对实现家居老人和病人的部分自理需求具有重要的意义。
1 护士机器人的系统设计
根据家居老人和病人在子女上班期间对护理的要求,护士机器人应具有室内自主移动和取、送物品(食品、瓶装药、水果、瓶装水和毛巾等)等功能。为完成上述要求,拟人护士机器人由机械系统、移动平台和控制系统等构成。机械系统完成物品的抓取和抬升,移动平台实现机器人室内的自主移动,机械系统和移动平台的运动通过控制系统实施控制。
1.1 移动平台的机械结构
移动平台选用AS-R机器人,如图1所示。该机器人为模块化结构,由动力、控制、传感3个模块构成,模块间采用螺栓连接定位。整机采用前部2个差速驱动的驱动轮和后部一个万向轮实现3点支撑。底箱为动力系统,装有驱动电机、驱动器和锂电池,锂电池安放在底箱的后部。中箱为控制系统,装有主板、电源、硬盘、计算机板卡、按钮及接插口等。顶箱为传感系统,圆盘型,装有摄像头和无线网卡等,其侧面圆周均布12个孔,安装了5个超声传感器和4个红外传感器。箱体的材料用铝合金板,轮毂、轮盘等承力部件采用高强度硬铝合金。
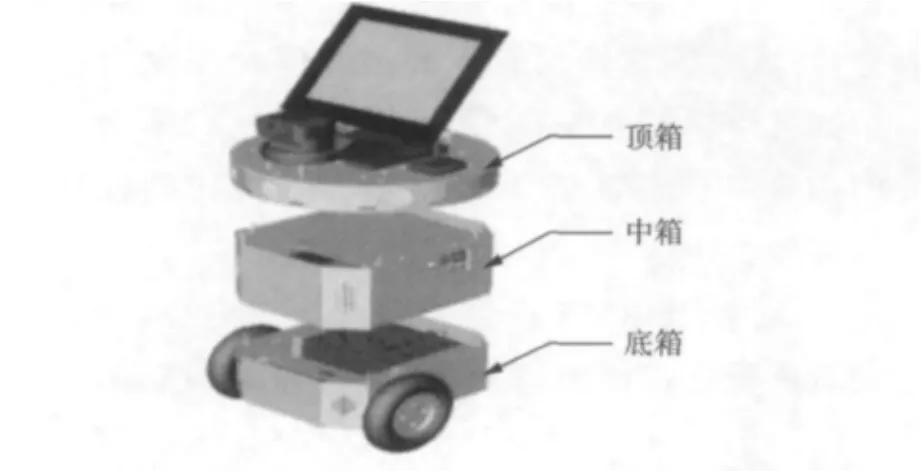
图1 护士机器人移动平台Fig.1 Moving platform of the nursing robot
1.2 机器人手臂的设计
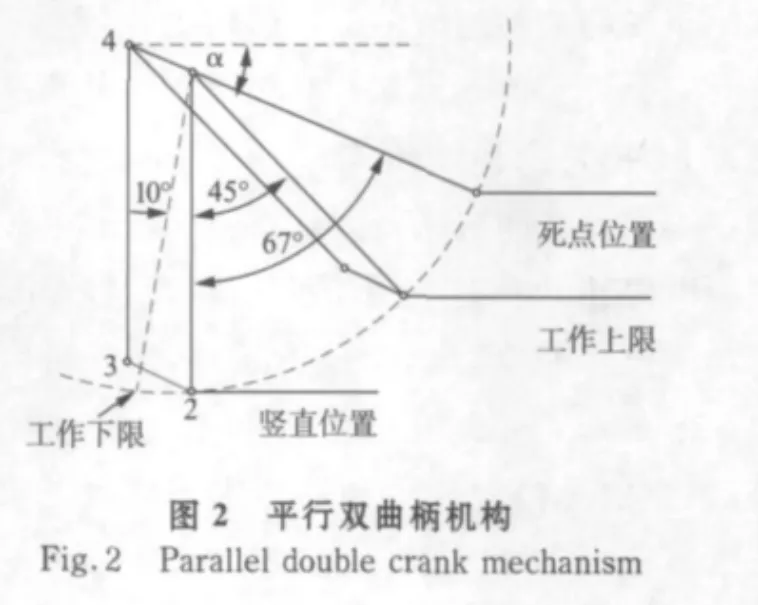
机器人的手臂采用关节型机构,由大臂、小臂及肩部、肘部、腕部处的类人关节构成。在满足护士机器人的功能要求前提下,手臂采用欠驱动的结构形式,选用如图2所示的平行双曲柄机构。其2个曲柄安装于大臂,连杆固联于小臂。仅需1个动力就完成了大臂和小臂的运动要求,既减少了电动机数目,减轻了手臂的质量,又提高了机器人运动的整体稳定性。根据平行双曲柄机构的性质,连杆与机架始终保持平行,满足手掌始终保持水平位置的要求。取机架与水平的夹角α为23°,由图2运动轨迹可知,当曲柄由垂直位置逆时针转67°时,机构处于死点位置。取大臂的工作角度范围为-10°~45°,该区域由机构运动确定。根据机器人手臂的长度要求,初定曲柄的长度L1=222mm;连杆的长度L2=51mm。考虑到左曲柄为细长杆,且工作时受压力作用,故对该杆进行了压杆稳定校核。根据初步确定的机器人手臂结构尺寸,利用 SolidWorks软件[2-3]建立其三维模型,如图3所示。

1.3 操作手的设计
操作手的动力为电动机,手部选用四杆夹持机构,根据夹持力和夹持空间的要求,确定四杆机构的初步尺寸。利用SolidWorks软件对操作手机构建模,如图4所示。
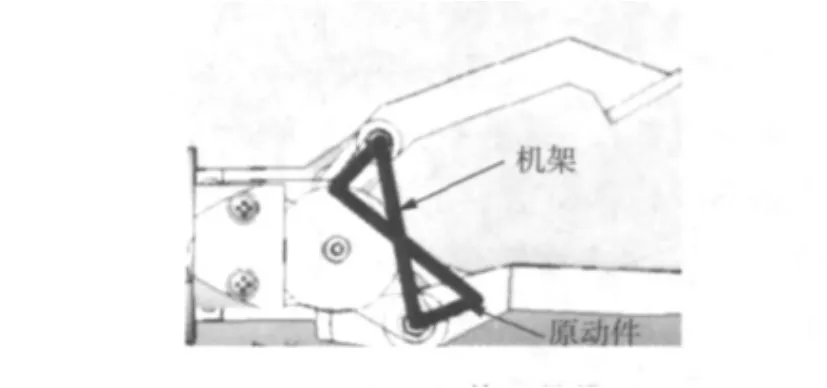
图4 操作手机构三维模型Fig.4 Three dimensional model of the Manipulator mechanism
1.4 机器人传动系统的三维建模与干涉检验
在完成传动部分各零件的建模后,应用Solid-Works软件对机器人传动系统进行三维建模,所得模型如图5所示。为检查所建模型结构尺寸的合理性,应用SolidWorks软件的碰撞检查功能,查看相对运动之间的构件是否干涉。如对平行双曲柄机构的曲柄与胸部机构的输出轴进行干涉检查时,在SolidWorks装配体界面中,点击移动零部件,选择自由拖动模式,选中碰撞检查,再点击这些零部件之间选项,选择曲柄以及输出轴,并在碰撞时停止选项打勾。手臂在移动过程中,连架杆与轴发生碰撞时就会停止运动,碰撞的零部件会显示为绿色。运用SolidWorks软件的测量图标,测量这一位置时原动件与水平之间的夹角位置没有超出工作上限,故需要修改机器人相关的设计参数,最终将机架与水平线之间的夹角由初始的23°修改为17°。
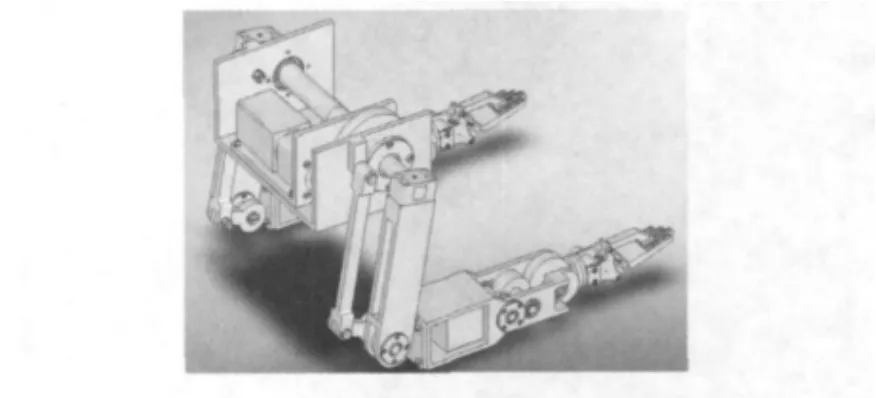
图5 机器人传动系统三维模型Fig.5 Three dimensional model of the robot's drive system
1.5 控制系统设计
行走控制系统采用了三轴运动控制卡、直流伺服电动机及配套驱动器。移动平台控制系统主要完成机器人的前进、后退和原地转身等动作。系统采用了标准的数据总线与外接进行数据通讯,主机配置较高,且具有强大的网络功能和丰富的硬件资源,便于用户扩展。
护士机器人机械系统的运动控制是采用基于工控机的控制系统。系统主要由工控机、运动控制卡、执行电动机反驱动器等组成。通过运动控制卡控制各电动机的运动来实现规定的动作。其控制系统结构如图6所示。
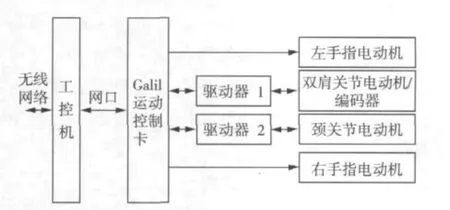
图6 机械系统的控制系统Fig.6 Control system of mechanical system
2 主要机构参数的优化设计
2.1 机器人手臂机构的优化
机器人大臂需要的动力决定了臂部动力的配备和机构的结构尺寸,降低大臂转动力矩对于护士机器人的结构优化具有重要意义。ADAMS是典型的机械系统动态仿真分析软件,在机构的仿真优化方面得到了广泛应用[4-13]。机械手臂机构是决定机器人性能的重要因素,其引起了研究人员的关注[14-15]。本文采用 ADAMS机械分析软件,以大臂轴的输出转矩的最大值最小化为目标函数进行机构参数的优化。设置臂部双曲柄机构的初始位置点如表1和图2所示,确定的设计变量如表2所示。
通过ADAMS提供的设计研究模块,对上述变量进行设计研究,得到各变量的大小变化对转矩的影响。研究表明,DV_2和DV_3的灵敏度分别为-1 158.6和-699.6,远高于其他设计变量变化对大臂输出转矩的影响。利用ADAMS提供的优化设计模块,以DV_2和DV_3为设计变量进行机构构件尺寸参数优化,图7所示为优化前后机器人手臂机构输出转矩T的对比情况。

表1 机器人手臂机构各点坐标值Tab.1 Coordinates of various points for robot's arm
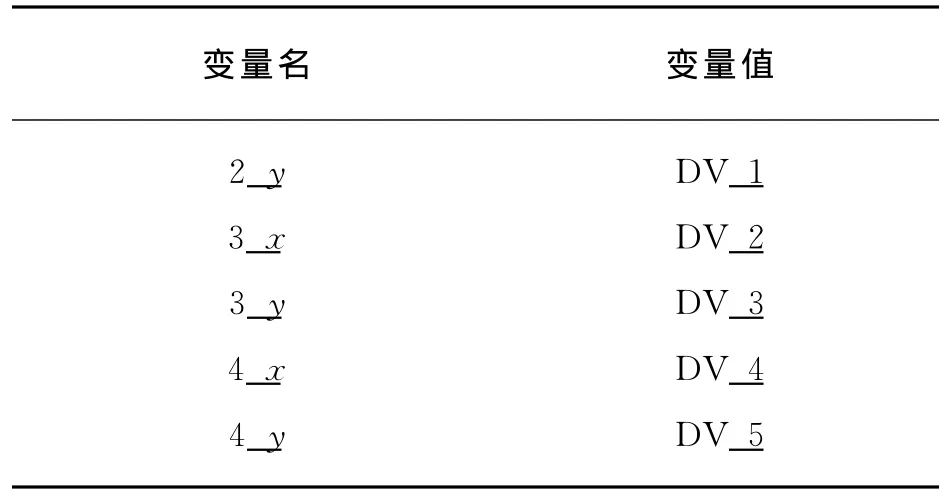
表2 机器人手臂机构各点设计变量坐标Tab.2 Design variable's coordinates of variouspoints for robot's arm
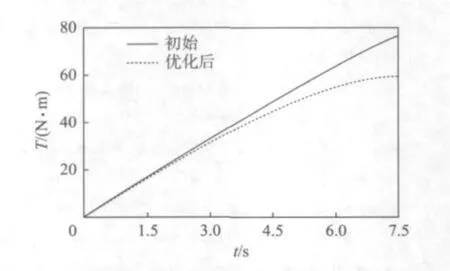
图7 优化前后机器人手臂机构输出转矩对比Fig.7 Output torque contrast before and after optimization for robot's arm
对比发现,优化后大臂的输出转矩明显减小。机构经过优化3点的坐标值由初始的(-48.771,-207.089)变化为(-48.771,-205.018),优化前后构件的尺寸变化幅度很小,机械手在达到工作上限时,小臂与水平线夹角向下倾斜约5°,大臂转矩的最大值则减小23%,优化效果非常显著。明显改善了机构的动力学性能及机架的受力性能,可以满足设计要求。
2.2 机器人操作手机构的优化
运用ADAMS软件,以四杆机构的连架杆(拇指)角速度的最大值最小化为目标函数,进行机构参数的优化。初始位置如表3所示,设计变量如表4所示。
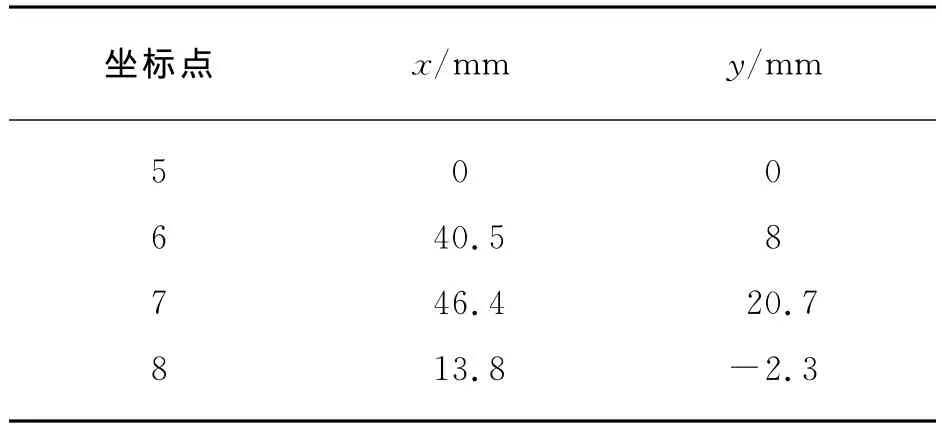
表3 机器人操作手机构各点坐标值Tab.3 Coordinates of various points for robot's thumb
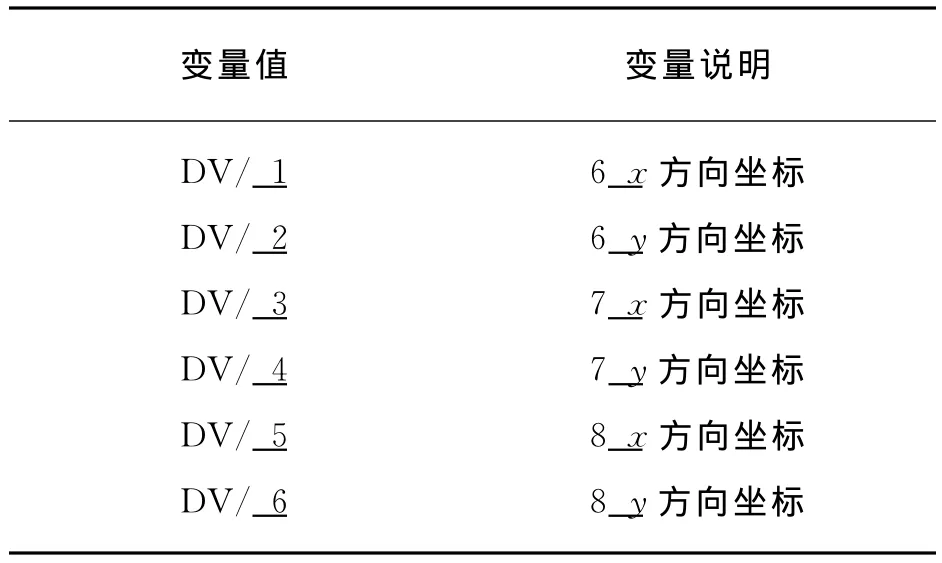
表4 机器人操作手机构初始设计变量Tab.4 Initial design variables for robot's thumb
若夹紧过程中角速度ω过大,则夹紧装置对夹紧物的冲击过大,可能引起夹持物变形等问题。
通过ADAMS软件提供的设计研究模块,对各变量进行设计研究得到 DV/_2,DV/_4和DV/_5的敏感度最大,即对机构的角速度影响最大。取3个设计变量的变化范围:DV/_2的变化范围为-6%~0%,DV/_4的变化范围为-10%~0%,DV/_5的变化范围为0%~10%。利用优化分析模块,进行各构件尺寸的优化,得到优化前后机器人操作手机构角速度对比情况,如图8所示。
对比分析发现,机构优化后角速度明显减小,优化后3个变量的值 DV/_2为246.10,DV/_4为240.28,DV/_5为136.30,此时可以满足设计要求。杆件上点2_y方向坐标由初始值8mm变为8.48mm,点3_y方向坐标值由初始值20.7mm变为18.63mm,点4_x方向坐标由初始值13.8mm变为15.18mm。

图8 优化前后机器人操作手机构角速度对比Fig.8 Angular velocity contrast before and after optimization for robot's thumb
3 结 语
设计的基于连杆机构的机械手臂和操作手机械结构简单,动力源较少,传动可靠。其手臂驱动采用安装于胸部的电动机和减速器组合实现,大臂机构以平行双曲柄机构驱动小臂运动,并使小臂始终保持水平。利用SolidWorks软件完成了对护士机器人机械系统的三维建模、装配以及干涉检验。通过参数的修正满足手臂与操作手的运动要求。以操作手的拇指转动的角速度最大值最小化和大臂轴的输出转矩最大值的最小化作为优化目标函数,通过ADAMS分析软件对两种机构进行了参数优化。根据优化结果,对关键点的尺寸进行了调整,即改变了构件尺寸,极大地改善了护士机器人的整体性能。
[1] 宁 萌,孙江宏,郝静如.新型多功能自动平衡护理床的设计与运动学分析[J].CAD/CAM与制造业信息化,2010(9):53-56.
[2] 江 洪,江 帆,陆利锋,等.SolidWorks机械设计实例解析[M].北京:机械工业出版社,2006:129-201.
[3] 刘 玲,周旭东,梁新合.基于Solid Works环境的壁板挤压模虚拟装配[J].CMET锻压装备与制造技术,2005(1):103-105.
[4] 樊飞龙,雷 秀,费树辉.基于ADAMS固定作业机器人运动仿真[J].机械工程与自动化,2006(6):29-31.
[5] 樊炳辉,曹燕杰,孙爱芹,等.康复用多自由度假肢大臂外摆机构的优化设计[J].机械设计与制造,2011(9):132-134.
[6] 黄 华,王生泽.基于ADAMS的精梳机钳板机构优化设计[J].煤炭技术,2011,30(10):212-214.
[7] 王文玺,肖世德,孟 文,等.基于虚拟样机的机械臂动力学建模与仿真[J].计算机应用研究,2009,26(1):105-107.
[8] 戴 成.基于Adams的吊管机配重机构动力学仿真与结构优化[J].建筑机械,2011(3):88-90.
[9] 何 邕,贾美薇,李萍奎,等.基于虚拟样机的铲运机工作装置仿真及优化[J].系统仿真学报,2011,23(4):702-706.
[10] 蒲明辉,苏 飞,李 凯,等.基于ADAMS的后装式压缩垃圾车卸料机构优化设计[J].机械设计与制造,2011(7):218-220.
[11] 高 洪,赵 韩.6自由度6-3-3并联机构支链干涉检验的动画仿真方法研究[J].机械传动,2006(4):20-22.
[12] Meghdari A,Hosseinkhannaier H,Selkghafari A.An optimum design and simulation of an innovative mobile robotic nurse unit to assist paraplegic patients[J].Proceedings of the IEEE International Conference on Mechatronics,2004:141-147.
[13] Xin Shaojie,Zhang Huanhuan.The dynamic optimization and a new structure of the nursing bed robot[J].Key Engineering Materials,2010,426/427:352-355.
[14] 周惠明.关节型机械手的结构创新设计[J].煤矿机械,2007,28(10):17-19.
[15] 薄少军,刘莉娜.喷浆机器人大臂机构仿真设计[J].机械设计与制造,2007(8):127-128.
Optimization of Mechanism Parameters and System Design of Nursing Robot
XIN Shaojie,ZHANG Huanhuan
(School of Mechanical,Shanghai Dianji University,Shanghai 200245,China)
A nursing robot is designed to help the elderly and patients who cannot take care of themselves.The robot's moving platform and the control system use an industrial computer.With the software Solid Works,aprototype is modeled,assembled and interference-checked.The soft of ADAMS is used to simulate and optimize the motion of the robot mechanism.The goal of optimization is to minimize the maximum value of both angular velocity of the robot's thumb and output torque of the arm.With the optimized mechanism size,the robot's mechanical performance is greatly improved.
nursing robot;structure design;control system;interference checking;optimization design
TP 24
A
2095-0020(2011)06-0356-05
2011-09-26
国家高技术研究发展计划(863)项目资助(2007AA041604);上海市教育委员会重点学科资助(J51902)
辛绍杰(1963-),男,教授,博士,专业方向为机械设计及机器人技术,E-mail:xinsj@sdju.edu.cn
猜你喜欢
环境技术(2021年4期)2021-09-11 08:26:06
机械工程师(2021年4期)2021-04-19 07:27:56
设备管理与维修(2019年22期)2019-12-19 01:30:12
机械研究与应用(2018年5期)2018-11-05 05:59:38
载人航天(2016年4期)2016-12-01 06:56:21
浙江大学学报(工学版)(2016年2期)2016-06-05 09:20:51
现代工业经济和信息化(2016年5期)2016-05-17 05:35:56
国外科技新书评介(2015年3期)2015-05-28 10:38:04
综合智慧能源(2014年1期)2014-09-10 07:07:40
中国工程机械学报(2014年3期)2014-05-25 08:31:14
