
最大转矩控制的电梯专用永磁同步电动机系统仿真
2011-01-16 08:25:52马智超
上海电机学院学报 2011年6期
马智超
(上海理工大学 光电信息与计算机工程学院,上海 200093)
最大转矩控制的电梯专用永磁同步电动机系统仿真
马智超
(上海理工大学 光电信息与计算机工程学院,上海 200093)
研究电梯专用永磁同步电动机(PMSM)的控制方式。在PMSM数学模型基础上,提出了单位电流最大转矩控制策略并予以论证。通过Matlab/Simulink对电动机运行状态仿真,验证了采用单位电流最大转矩控制策略的PMSM矢量控制系统具有优良的速度跟踪性能,适用于拖动电梯负载运行。
单位电流最大转矩;永磁同步电动机;Matlab/Simulink;电梯
电梯专用曳引机,在外观上必须具有体积小、质量轻等优势,以便安置于狭小的井道中。此外,要使电梯,尤其是载人客梯拥有良好的S型速度曲线,则其驱动电动机需具备起动转矩大、转速高、调速范围大、机械特性较硬等特点;同时,考虑到安全因素与绿色节能,以选择动态制动强、能量回馈效率高的电动机为佳。
长久以来,直流电动机与交流异步电动机常被作为电梯曳引机使用[1-3]。但是,直流电动机中的电刷会导致巨大的能耗;交流异步电动机在经过“电—磁—电”能量转换后,输出效率也被降低。因此,寻找一种稳定且高效的曳引机已成为电梯驱动领域的重大课题。近年来,随着大功率半导体器件、稀土材料(高磁能积的永磁体)和微型计算机的发展,使永磁同步电动机(Permanent Magnet Synchronous Motor,PMSM)得到越来越广泛的应用。与此同时,电梯控制技术在经历了直流驱动控制,交流单、双速驱动控制,直流有齿轮和无齿轮调速驱动控制,交流调压调速驱动控制,交流变压变频调速驱动控制后,逐步进入了PMSM 变频调速驱动控制阶段[4-5]。
当今,对电梯控制系统的设计要求也“水涨船高”,在保证控制性能良好、算法合理的同时,还要考虑开发周期、价格成本等综合因素。因此,如何建立PMSM控制系统已成为研究人员急需解决的问题。本文在 PMSM 数学模型基础上[5-8],提出并论证了单位电流最大转矩控制策略,并通过Matlab/Simulink仿真软件,对电梯专用PMSM起动时的输出特性进行仿真。
1 PMSM常用控制策略
PMSM有直轴电流id=0控制、恒功率控制、恒磁通控制、弱磁控制等多种控制方式。它们各有所长,亦各有所短[9-11]。
(1)id=0控制是最简单的控制方式,其机械特性与直流电动机相似。其主要缺点表现在:功率因数随着端电压的增大而减小,在设计驱动电路时,需要容量较大的逆变器;无法充分利用磁阻力矩,电动机输出功率较小。
(2)恒功率控制保持电压矢量与电流矢量方向一致,即cosφ=1,其中φ为功率因数角。这种控制方式能最大限度地发挥逆变器容量,但永磁体易受温度影响,使定子电流在直、交轴的分量无法与输出转矩保持线性关系,控制方式比较繁琐;且当负载发生变化时,可能造成控制系统性能降低。
(3)恒磁通控制保持端电压比值为1,提高了电动机输出转矩,但计算量较大,难以实现。
(4)弱磁控制与他励直流电动机的调磁控制相似,通过改变励磁电流来减小永磁体产生的感应磁场。这种控制策略可扩大调速范围,使电动机获得更高转速,但在低速运行时的性能欠佳。
2 PMSM控制系统设计
PMSM控制系统如图1所示,其中,id,iq为直、交轴上的电流。在电磁转矩Te给定后,电流计算单元生成电动机在直、交轴上的电流参考信号id,iq,并把该信号传送至坐标变换单元。坐标变换单元把d-q旋转坐标系下的两相相电流转换成a,b,c静止坐标系的三相相电流为

式中,θ为旋转d轴与静止a轴的夹角。

图1 永磁同步电动机系统原理图Fig.1 PMSM vector control system
系统中的反馈环为电流环,由自动电流调节器(Automatic Current Regulator,ACR)构成,通常采用PID算法实现。三相电流信号的参考值与电流信号的反馈值进行比较,把差值送至ACR,其输出为电压参考值,与给定载波比较后,形成脉冲宽度调制(Pusle Width Modulation,PWM)调制波,控制逆变器实际输出电压。位置检测模块用于获取转子位置信息,并将电角度θ反馈至坐标变换模块。
3 单位电流最大转矩控制策略
单位电流最大转矩控制是PMSM常用的一种电流控制策略,其基本思想为:在转矩给定的条件下,使得定子电流最小。
文献[12]中,隐极式PMSM气隙中的磁场分布不均匀,故其在直、交轴(及d,q轴)的转矩为

式中:pn为电机极对数;Ld和Lq为直、交轴上的电感;φf为永磁体在直、交轴上的磁链。
直流侧电流矢量is与id,iq的关系为

则单位电流最大转矩控制策略转化为式(3)在满足(2)式的条件下求极小值的数学问题。根据Lagrange极值定理,做辅助函数

式中:λ为拉格朗日因子;T*为给定力矩。
对式(4)的变量id,iq,λ分别求一阶偏导,并令其为零,则

求解得:

由此可见,当T*与id,iq满足式(6)所述的函数关系时,定子电流矢量is的模值最小。
4 电动机运行状态仿真
为验证单位电流最大转矩控制策略适合于PMSM控制系统,对电动机不同运行状态的输出特性曲线进行仿真,得出的定子电流、电动机转速、电磁转矩等波形具有重要的参考价值。它们决定了实际电梯的运行性能、控制系统的可靠性、乘梯的舒适感和平层的精确性。
本文以PMS420电梯专用PMSM为例进行分析。该电动机使用310V三相交流电,负载质量约为320kg,推荐使用高度为80m。具体仿真参数如表1所示。

表1 系统仿真参数Tab.1 Parameters used in simulation
使用Matlab/Simulink软件构造PMSM仿真系统,仿真结构框图如图2所示。
选取Simulink包中自带id,iq电流计算模块、PWM逆变器模块、PMSM模块、电动机参数测量模块和示波器,并对坐标变换模块进行改造,得到本仿真适用的dq/abc模块,参照表1设置电动机仿真参数,并将电动机参数测量模块所测得的转子转角信号反馈给dq/abc坐标变换模块,将定子侧三相电流信号反馈给PWM逆变器模块[13-15]。
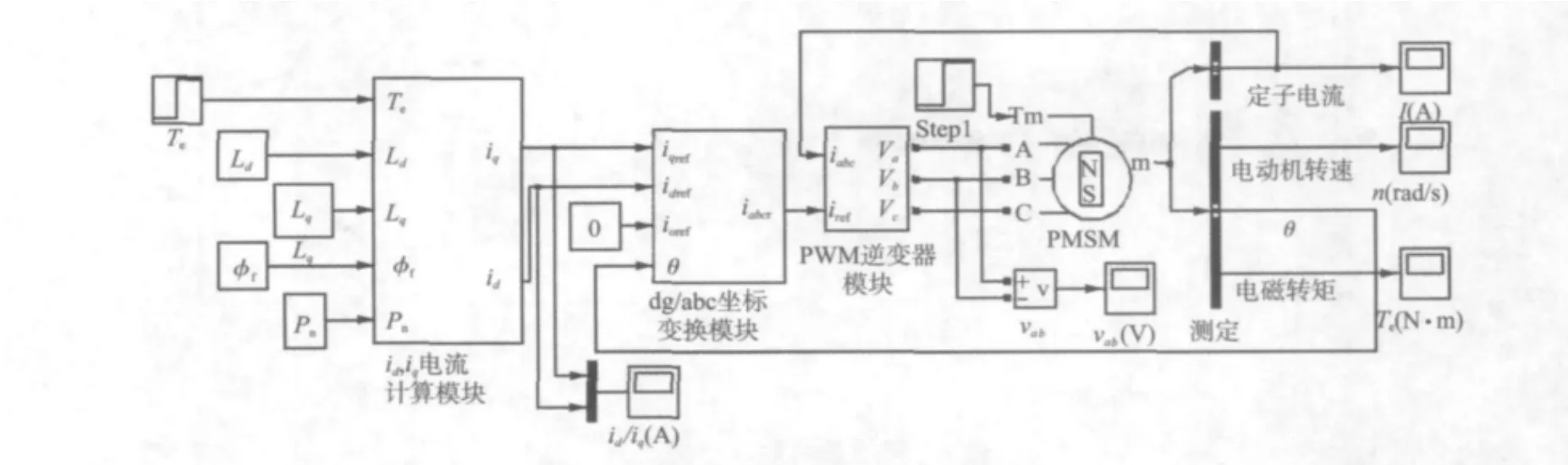
图2 永磁同步电动机系统仿真结构框图Fig.2 Simulink diagram of PMSM structure
如图3所示构建磁链计算模块。其中黑框外部为Clarke坐标变化部分,黑框内部为磁链生成部分。
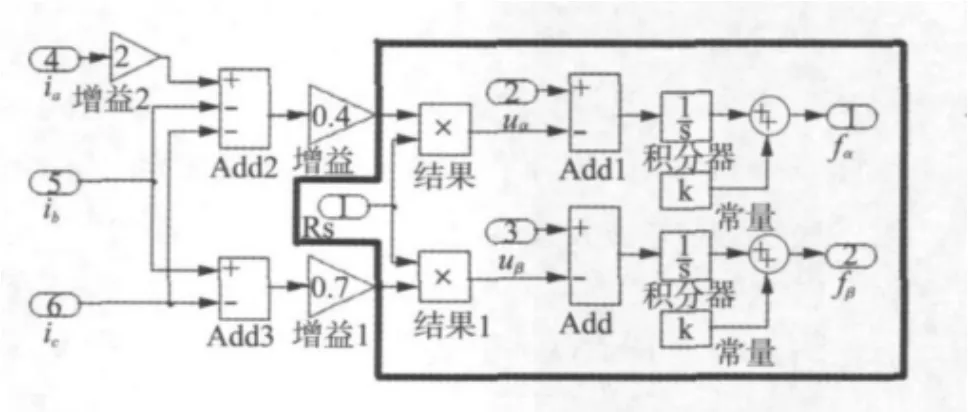
图3 磁链计算模块Fig.3 Flux calculation model
4.1 电动机启动状态仿真
假设给定转速n*=80rad/s,仿真波形如图4所示。由图4的输出波形可以看出,尽管转矩和磁链都存在小范围波动,但三相电流波形呈正弦状,磁链轨迹接近于正圆,都属于理想的波形。此外,系统启动后,仅用15ms便进入稳定运行状态。由此可以判断:该系统启动稳定性能都较出色,能够满足电梯运行的基本要求。
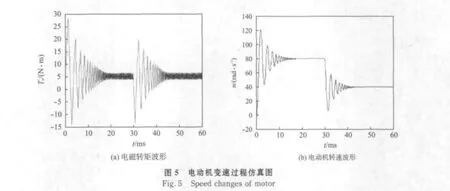
4.2 电动机变速状态仿真
电动机在稳定运行30ms后,转速发生突变,由80rad/s降至40rad/s,仿真波形如图5所示。由图5可以看出,系统仅用约10ms便完成了速度切换,从而验证了系统拥有极佳的速度跟踪性能。需要注意的是,电梯在载客或载物过程中,不能突然变速;同时,在系统模拟或排故等工作中,也需对电动机变速特性进行测试认证。
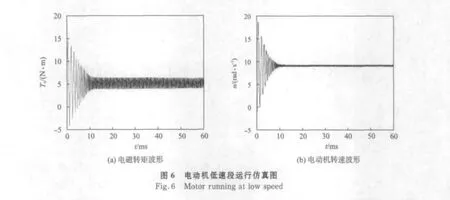
4.3 电动机低速运行状态仿真
假设给定转速n*=10rad/s,仿真波形如图6所示。相比而言,电动机在低速段爬行时的转速与转矩均存在较大脉动。若载人运行,乘客必能感受到电梯的振动,故该工作状态仅用于在司机操作下运输货物、电梯检修等极少数场合。
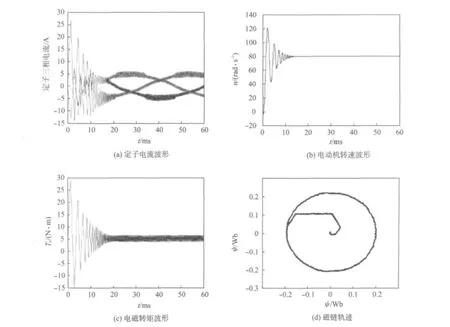
图4 电动机启动过程仿真图Fig.4 Starting state of motor
5 结 语
考虑到当电梯负载启动时需要较大的转矩,而单位电流最大转矩控制策略能有效地利用磁阻力矩,在达到输出较大力矩的同时,减小定子电流,使电动机铜耗减小,运行效率提升。故选用该种控制策略最为合适。结合仿真曲线,可以看出,该PMSM矢量控制系统具有良好的速度跟踪性能,完全适用于拖动电梯负载运行。
[1] 电梯维修站.三菱VFCL电梯培训教程[DB/OL].(2009-03-03)[2011-05-25].http://www.weee.cc/info/detail/2009/3/6396.
[2] 靳 强,孔凡生,齐建勇.VVVF电梯控制原理与控制系统[J].河南机电高等专科学校学报,1999,7(4):103-107.
[3] 廖学进,李永东,肖 曦,等.永磁同步电机控制系统及其在电梯中的应用[J].电力电子技术,2006,40(6):19-21.
[4] 阮 毅,陈伯时.电力拖动自动控制系统:运动控制系统[M].4版.北京:机械工业出版社,2010:142-146.
[5] 曹承志.电机拖动与控制[M].北京:机械工业出版社,2005:61-62.
[6] 唐任远,李振标.现代永磁电机:理论与设计[M].北京:机械工业出版社,2008:240-268.
[7] Kurihara K,Rahman M A.High-efficiency linestart interior permanent-magnet synchronous motors[J].IEEE Transactions on Industry Applications,2004,40(3):789-796.
[8] Zhou Guangxu,Tang Renyuan,Lee Donghee,et.al.Research on the reactance parameters of two interior rotor structures permanent magnet synchronous motor[C]//2007ICEMS International Conference on Electrical Machines and Systems.Seoul:IEEE,2007:1366-1370.
[9] 雷 波.永磁同步电机控制策略研究及仿真[D].武汉:武汉理工大学,2008.
[10] 于宏溪.永磁同步电机控制系统的研究[D].阜新:辽宁工程技术大学,2009.
[11] 沈 围.低速大转矩永磁同步电机控制系统研究[D].北京:北京交通大学,2011.
[12] 徐佳园.永磁同步电机最大转矩电流比控制[D].北京:北京交通大学,2010.
[13] 洪乃刚.电力电子与电力拖动控制系统的 MATLAB仿真[M].北京:机械工业出版社,2006:196-199.
[14] 黄慧敏.永磁同步电机控制方法建模与仿真研究[D].武汉:武汉理工大学,2007.
[15] 高延荣,舒志兵,耿宏涛.基于 Matlab/Simulink的永磁同步电机(PMSM)矢量控制仿真[J].机床与液压,2008,36(7):296-299.
Simulation of Maximum Torque Control of Permanent Magnet Synchronous Motor System Specifically for Elevators
MA Zhichao
(School of Optical Electrical and Computer Engineer,University of Shanghai for Science and Technology,Shanghai 200093,China)
To find a reasonable control means for permanent magnet synchronous motor(PMSM),this paper gives and proves the theory of maximum torque per Ampere according to the PMSM's mathematical model.Based on the simulation of the PMSM running state with Matlab/Simulink,we conclude that the PMSM vector control system has excellent performance of speed tracking,and therefore is suitable to motors used for driving elevators.
maximum torque per ampere;permanent magnet synchronous motor(PMSM);Matlab/Simulink;elevator
TM 341;TP 391.9
A
2095-0020(2011)06-0395-05
2011-10-16
马智超(1987-),男,硕士生,专业方向为电机与电器,E-mail:ma_zhichao1987@sina.com
猜你喜欢
上海大中型电机(2021年2期)2021-07-21 03:01:32
防爆电机(2020年6期)2020-12-14 07:16:54
光学精密工程(2016年3期)2016-11-07 09:03:49
电测与仪表(2016年10期)2016-04-12 00:26:38
华东理工大学学报(自然科学版)(2015年2期)2015-11-07 09:16:20
华东理工大学学报(自然科学版)(2015年2期)2015-11-07 09:16:20
大电机技术(2015年5期)2015-02-27 08:22:28
电测与仪表(2014年23期)2014-04-04 12:08:30
电测与仪表(2014年11期)2014-04-04 09:21:36
组合机床与自动化加工技术(2014年12期)2014-03-01 02:22:54
