
木琴演奏机械手的仿真分析与设计
2011-01-16 03:39王廷军马西沛张欢欢胡申顺
上海电机学院学报 2011年3期
王廷军, 印 松, 马西沛, 张欢欢, 胡申顺, 徐 俊
(上海电机学院 机械学院,上海 200245)
木琴演奏机械手的仿真分析与设计
王廷军, 印 松, 马西沛, 张欢欢, 胡申顺, 徐 俊
(上海电机学院 机械学院,上海 200245)
利用SolidWorks软件对一种单槌击键演奏模式的木琴演奏机械手进行了仿真设计,给出了木琴、移槌装置、击槌装置和机械手支架等部分的三维造型、虚拟装配和运动仿真结果,提出了一种基于DSP芯片的机械手运动控制方案。仿真结果表明:这种机械手结构简单,运动灵活,演奏时能够快速而准确地定位击键位置,为木琴演奏机械手的设计提供理论依据。
木琴演奏机械手;仿真分析;三维模型
随着机器人技术的快速发展,机器人的设计也不仅仅限制在工业环境的需求设计中,而向人类生活的各个领域扩展,出现了如娱乐、导游等各种不同的机器人。近年来,娱乐机械人发展很快,已经有演奏多种乐器的演奏机械手出现[1]。演奏机械手属于表演类特种机器人,国外关于演奏机械手的研究主要集中在键盘乐器和弦乐器方面,管乐器自动演奏机械手的研究相比较就少些[2-4]。无论何种乐器,在演奏时都是通过人的手、口或脚的动作来实现的。木琴属于西洋打击乐器的一种[5],由逐级加长的一排排镶嵌的木条组成,按音阶的顺序排列在一框架上,可发出连续的音律。有的木琴的木条下方安装了可调节音高的共鸣管,起到共鸣的作用。木琴是通过演奏者双手握木槌去击打键盘进行演奏的,在原理上,能够模仿人手并再现键盘的动作,可以实现机械手自动演奏[6-7]。
为缩短木琴演奏机械手的设计周期,降低设计成本,提高设计质量,本文使用SolidWorks软件[8]进行了木琴演奏机械手的辅助设计。
1 总体设计
单槌击键式木琴演奏机械手主要由机械部分和控制部分组成,包括工控机、移槌装置、击槌装置、运动控制器、木琴和支架等。它的三维模型如图1所示。其工作原理是使用击槌装置代替人手去握持木槌和击打琴键。击槌装置安装在移槌装置上,通过移槌装置的左右水平快速移动完成木槌击键位置的定位,利用击槌装置中的木槌操纵机构实现木槌的击键动作,从而完成一个音符的演奏。
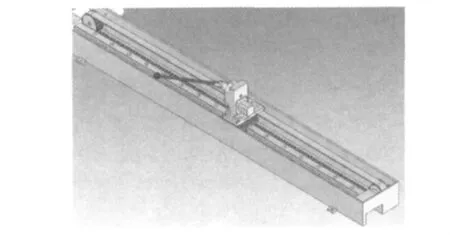
图1 木琴演奏机械手三维模型Fig.1 Three-dimensional model of marimba manipulator
木琴演奏机械手系统图如图2所示。机械手的工控机输出乐谱程序指令给运动控制器,控制器发出移动命令,驱动移槌装置和击槌装置连续交替动作实现乐曲演奏。演奏时的主要动作是木槌的横向位置控制和向下的槌击动作控制。
设计中,先对木琴实物进行仿真建模,再对机械手的各部分进行仿真建模。同时,进行了虚拟装配、干涉检查和运动仿真,确保其各部分在安装后能够无干涉并符合预先设定的运动方案。
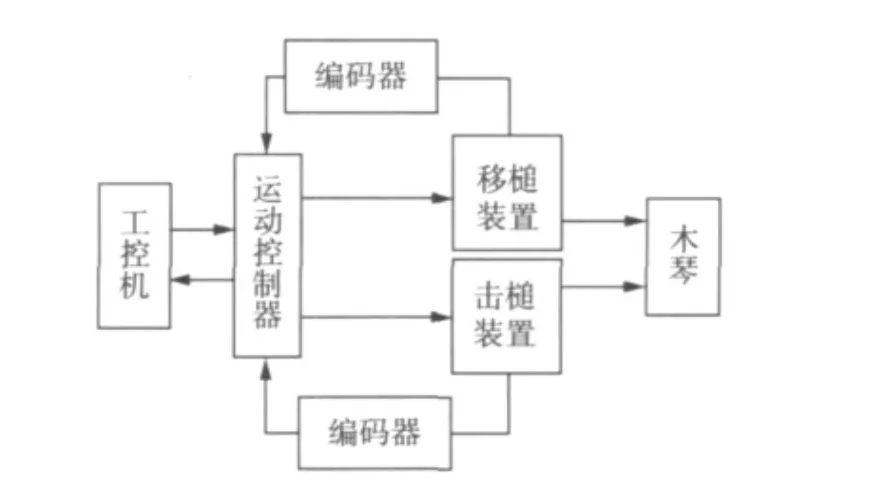
图2 木琴演奏机械手系统图Fig.2 Marimba manipulator system
2 木琴的仿真建模
木琴的仿真主要是对一种724型木琴进行整体建模,包括木琴架、琴键、共鸣管和支架等所有零部件。为确保合理的建模基准及精准的琴键位置、形状尺寸,采用了自顶向下(Top-down)的建模方法。即先确定机械手的总体装配结构和零件组成,对不同设计方案进行分析、组合,选择出最佳设计方案,再对具体零件进行详细的分析设计。本文中演奏机械手固定在支架上,支架又通过木琴架与木琴相连,故在建模时采用木琴架为定位基准,而不是普遍理解上的以支架作为基准。
建模时,先建立木琴的外围框架及琴键的定位架,然后对琴键建模,再按支架与琴键的相对位置对支架建模。木琴的三维模型如图3所示。
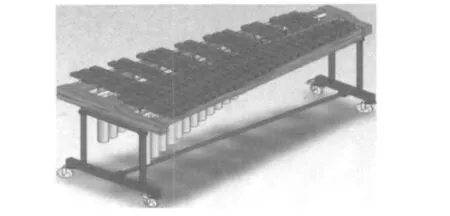
图3 木琴三维模型Fig.3 Three-dimensional model of marimba
3 机械装置设计及其仿真与分析
机械装置部分主要由移槌装置、击槌装置和支架等组成。按结构对其各部分完成建模、装配后,对其进行初步运动模拟,检查移槌装置、击槌装置在运动中是否会产生干涉,确保运动可行性。
在对既定的机构方案进行建模并装配后,进行设计结构的运动仿真。通过定义各部件间的运动副,分析其各部件相对运动形式,定义运动部件的运动方式。经解算器解算得仿真结果及演示,输出各个运动件的位移量、速度及曲线图。
3.1 移槌装置
移槌装置为小车状物体,其传动机构采用同步齿形带方式。同步带使用软齿条传动,不会产生滑动,可以保证传动时的准确传动比,噪声较小[9]。它由滑座、顶盖、滚珠导轨、步进电动机、编码器、减速机构、同步带和带轮等组成。
顶盖由不锈钢制成,用于遮挡同步齿形带和导轨等,使得传动机构外表美观大方。滑座由上滑块和下滑块组成,上滑块用于连接移槌装置,下滑块用于连接同步带。上滑块和下滑块使用螺栓连接,两者之间形成一个矩形间隙,顶盖则在这个矩形间隙中穿过。下滑块由同步带拖动,在滑轨上水平移动。图4给出了未安装顶盖和上滑块的移槌装置示意图。
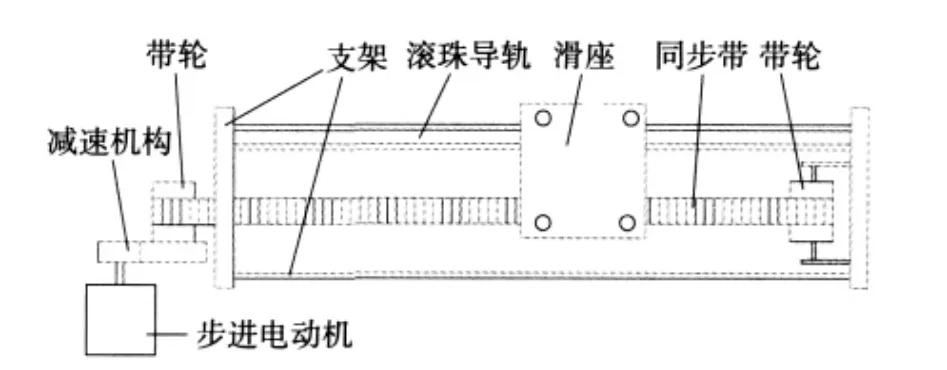
图4 移槌装置示意图Fig.4 Mallet-moving device
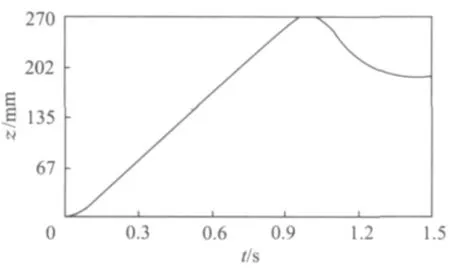
图5 移槌位移曲线Fig.5 Curve of displacement of mallet-moving device
滑座的运动通过步进电动机、编码器组成的伺服系统由同步带直接牵引,木槌固连在滑座上,随滑座一起移动,按计算机程序给出的目标值(音符数据)变换木槌位置。移槌装置的移槌位移曲线如图5所示,其移槌角加速度曲线如图6所示。
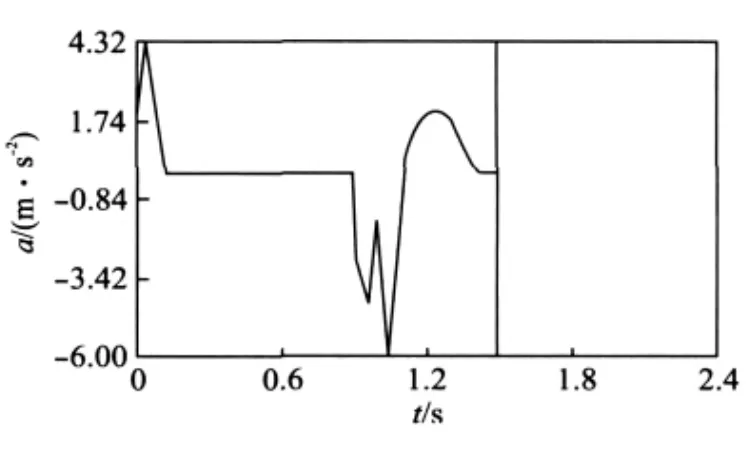
图6 移槌角加速度曲线Fig.6 Curve of angular acceleration velocity of mallet-moving device
3.2 击槌装置
击槌装置相当于人的手掌和手腕部分,它由步进电动机、握木槌机构和支撑架等组成,由小步进电动机驱动完成击键动作。击槌装置的三维模型如图7所示。图8给出了击槌装置的位移曲线。演奏时,滑座的移动速度较快,故设计时考虑机械装置尽可能地减轻质量。
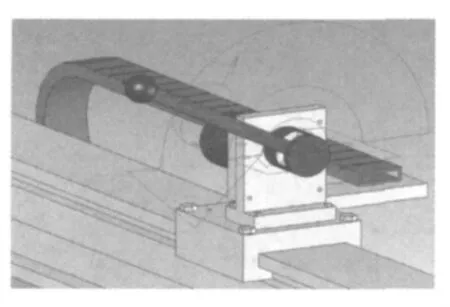
图7 击槌装置三维模型图Fig.7 Three-dimensional model of mallet-beating device
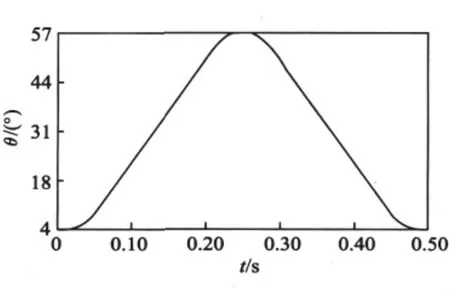
图8 击槌位移曲线Fig.8 Curve of displacement of mallet-beating device
击槌电动机采用小步进电动机,以功率够、体积小、质量轻为目标,从而减少机构的运动惯性,提高滑座运动时的位置精度。图9给出了击槌装置的角加速度曲线。由图可见,装置运动特性较好,适应快速灵活运动的要求。
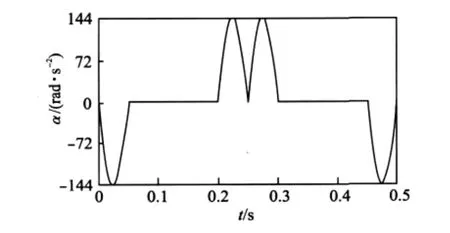
图9 击槌角加速度曲线Fig.9 Curve of angular acceleration velocity for mallet-beating device
4 控制系统设计
机械手控制系统采用上位机-下位机控制模式。上位机使用工控机,它带有操作系统,存储了一些采用VC++编排好的乐谱程序。下位机的微处理器采用TMS320F240DSP芯片,它具有高速、低功耗、易于开发等特点[10-12],能够满足演奏机械手的快速运动和变换运动方向的工作需求。上位机通过通信模块与底层控制器进行通信,底层控制器驱动步进电动机,实现对电动机的运动控制[13]。机械手滑座的水平移动、击槌装置的木槌转动都采用步进电动机驱动。光电式编码器作为检测电机轴的位置传感器。系统的步进电动机、反馈检测元件光电式编码器构成了伺服控制系统。
通常,机器人的运动轨迹规划与控制对机器人的工作非常重要[14-15]。对于木琴演奏机械手,其运动轨迹有移槌和击槌的复合运动形成,体现在槌头的轨迹是这两个运动的叠加结果。滑座机构快速、准确地运动到待击槌位置是保证机械手演奏定位精度的一个重要条件。
5 结 语
运用SolidWorks软件进行了木琴演奏机械手的辅助设计,包括三维造型设计、三维虚拟装配和运动仿真。通过对木琴、移槌装置、击槌装置和支架的仿真建模及虚拟装配,可及时发现设计中存在的结构错误,利用参数驱动功能实现同步修改。根据三维装配图动态仿真机构的传动关系、干涉检查和运动仿真,确保了机械手各部分在安装后无干涉并符合预先设定的运动方案,提高了设计效率。这种单槌击键式机械手结构简单、运动灵活、演奏定位准确,能演奏简单的编程乐曲。
[1]吴 兵,吴翠茹,王振坤,等.基于数控技术的电子琴演奏机械手研究[J].装备制造技术,2010(2):6-7,23.
[2]郭剑鹰,吕恬生.国外音乐机器人研究[J].机电一体化,2002(3):14-18.
[3]郭剑鹰,盛鑫军,吕恬生.吹笛机器人系统设计[J].机器人技术与应用,2001(6):19-24.
[4]张博玲,徐崇庶.萨克斯管和小号的自动演奏机器人[J].机器人技术与应用,1998(2):7-8.
[5]刘 刚.杂说打击乐器[J].乐器,2002(10):20-21.
[6]胡德静.浅谈木琴演奏的手臂作用与槌法[J].徐州教育学院学报,2000,15(3):88.
[7]汪 烨,王廷军.基于20GM定位模块木琴演奏机械手的研究[J].制造业自动化,2009,31(8):154-156.
[8]陈桂铨,郭智勇.SolidWorks 2000 实作 与 应 用[M].北京:中国水利水电出版社,2001.
[9]邓星钟.机电传动控制[M].4版.武汉:华中科技大学出版社,2007.
[10]刘银萍.基于DSP的足球机器人控制系统的设计[J].控制工程,2006,13(Suppl):173-175.
[11]李 临.基于TMS320F243DSP器件的位置控制器设计[J].电子技术,2000(9):56-58.
[12]水恒华,周 琴.基于双DSP+FPGA的自动影像数控加工控制系统[J].上海电机学院学报,2010,13(3):140-143.
[13]刘 兵,尤 波,宋继良.基于DSP的伺服运动控制器[J].哈尔滨理工大学学报,2005,10(3):114-116,120.
[14]张 富,朱泰英.基于能量与精确定位下机器人运动最佳路径的研究[J].上海电机学院学报,2009,12(2):154-156,172.
[15]李淑琴,尹 航.机器人可视化仿真模型及同步控制系统的研究[J].北京信息科技大学学报:自然科学版,2010,25(3):48-51.
Simulation Analysis and Design of Marimba Manipulator
WANG Tingjun, YIN Song, MA Xipei, ZHANG Huanhuan, HU Shenshun, XU Jun
(School of Mechanical,Shanghai Dianji University,Shanghai 200245,China)
Using the software SolidWorks,this paper presents simulation analysis and design of marimba manipulator in which a key is beaten by only one mallet.The manipulator's three dimensional model,virtual assembly,motion simulation and structure optimization of marimba,mallet-moving device,mallet-beating device,and its bracket are discussed.The control model and motion controller are also described.A motion control method is proposed based on DSP.The results show that the manipulator has a simple structure and agility moving.It can quickly and accurately localize a poison that beats a key.The design may provide theoretical supports to marimba manipulator.
marimba manipulator;simulation analysis;three-dimensional model
TP 241.3
A
2095-0020(2011)03-0169-04
2011-04-19
国家高技术研究发展计划(863)项目资助(2007AA041600);上海市教育委员会重点学科资助(J51902)
王廷军(1966-),男,副教授,博士,专业方向为机械电子工程,E-mail:wangtj@sdju.edu.cn
猜你喜欢
价值工程(2022年27期)2022-10-10
小读者之友(2021年12期)2021-01-02
扬子江(2020年4期)2020-08-04
小小艺术家(2019年11期)2019-12-20
作品(2019年3期)2019-09-10
精密制造与自动化(2018年3期)2018-09-19
制造技术与机床(2018年9期)2018-09-19
故事作文·高年级(2018年9期)2018-09-17
青年歌声(2018年11期)2018-01-23
橡胶工业(2016年6期)2016-02-24
