
SHADOWS合成孔径声纳系统及性能测试*
2011-01-10 09:40贺惠忠
中国海洋大学学报(自然科学版) 2011年7期
牟 健,贺惠忠,姜 峰
(国家海洋局南海分局,广东广州510300)
地球的陆地面积只占其表面积的29.2%,其它都是浩瀚的海洋。海洋不但有无尽的资源,而且对地球的环境有着重要的影响。随着科学技术的进步,人们的海洋活动逐渐增多增强。海洋已经成为人类活动的重要空间。进入21世纪以来,世界各国纷纷加大了对海洋研究和开发的投入,开发和利用海洋具有非常重大的意义。因此,21世纪被人们称为海洋的世纪[1]。
海洋开发利用、航运、地质勘探、水下物体搜索、军事活动都需要有高效的水下观察手段。图像和声音是人获取信息的主要来源,图像的信息更生动、更丰富、更直观,借助于各种成像设备,可以把现实世界中的景象记录和再现出来。在水下由于电磁波或光波受到强烈的衰减而无法用于较远距离的探测,所以声波成为目前唯一可利用的能够在水中远距离传播的能量形式,水下较远距离的成像均采用水声成像技术。目前国际先进的水声成像技术有:多波束地形测深系统、浅地层剖面成像系统和地貌测扫声纳系统。因此声波作为在水中进行探测和通信的主要手段,在海洋探测、海洋工程、海上军事作战、海洋科学研究等方面发挥着不可替代的作用。
海洋探测作为海洋开发利用的主要方面,倍受人们关注。它包括海底地质勘探、海底地质结构分析、海底地形地貌测绘、水下物体探测等。海洋探测的大量需求促进了水声成像技术的飞速发展。海底矿物资源开发需要进行水下工程勘测;在海洋权益划界谈判中,需要海底地形地貌和地质结构资料的支持;水声成像技术还可用于水下管线等探查、水下文物打捞和水下物体的探测与识别[2]。
1 合成孔径声纳技术
合成孔径声纳(synthetic aperture sonar,SAS)技术作为现代最先进、最新型的水下探测成像技术,它以合成孔径理论为基础,结合合成孔径雷达的技术,是国际水声高科技研究产品之一。与普通的声纳相比具有突出的优点:合成孔径声纳具有很高的横向空间分辨率(约为普通侧扫声纳的20倍),而且从原理上来说,它的分辨率与声纳的工作频率和作用距离无关。这样就可以用较小的声纳基阵和较低的工作频率同时满足近距离和远距离的高精度探测需要。由于分辨率与距离无关,合成孔径声纳可以获得均匀的空间分辨率图像。目前,合成孔径声纳是国内外海洋探测领域的研究热点和前沿之一,它通过二维或三维的成像结果,使人们获取对水底地形地貌直观而准确的资料;并且克服了传统水下光学成像、水声成像等技术分辨率受距离影响大的缺点,是远距离、大面积海底测绘成像的理想选择[3]。
2 SHADOWS合成孔径声纳系统
2.1 系统工作性能
SHADOWS是法国IXSEA公司最新开发成功的合成孔径声纳系统,它采用了迄今只用于军事声纳的最前沿科技,是世界上第一套商业用途的合成孔径声纳系统。该系统性能技术指标为:侧扫声纳频率:100 k Hz;前置声纳频率:300 kHz;发射通道:每侧3个;接收通道:每侧24个;分辨率:恒定15 cm,后处理后可达5 cm;水下定位精度:斜距的0.2%;覆盖角:200(°)。其工作原理见图1。
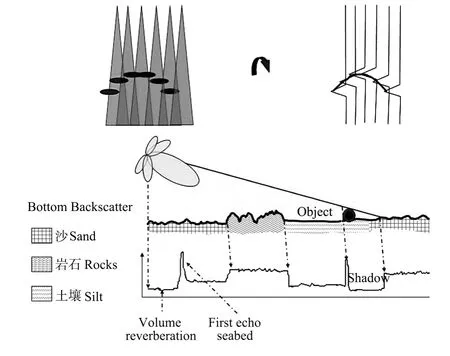
图1 Shadow s原理示意图Fig.1 Shadow s p rincip le diagram
该系统的原理是利用小尺寸声纳基阵沿空间匀速直线运动来虚拟大孔径声纳基阵。合成孔径声纳利用对目标物体多次发射声波并叠加回波的特殊聚焦算法来取代传统声纳的单次发射声波脉冲波束聚焦的方法,从而形成等效的大孔径,以实现在大量程下的高分辨率。
2.2 系统组成
该系统包括水上部分、水下部分及相关软件,见图2。

图2 Shadow s主要组成示意图Fig.2 Shadow s composition diagram
2.2.1 水上部分 水上部分包括甲板工作站、水下定位系统GAPS天线(水面GPS&USBL beacon)、甲板通讯缆、光纤绞车、拖鱼拖缆等。该系统的整个通信采用以太网的工作模式,甲板工作站包含供电模块、接线连接箱和数据采集、处理及存储的主机。主机采用网络图形服务器,来采集、处理和存储数据,并实现在该网络上的任一图形工作站都可以通过网络图形服务器进行数据的采集和处理工作。水下定位系统(GAPS)工作频率为20~30 k Hz;定位精度为斜距的0.2%;工作量程最大4 000 m;可同时跟踪4个水下目标,其覆盖角为200(°)。
2.2.2 水下部分 水下部分主要是1条长2 m,宽约1 m的拖鱼,其包括:INS惯性导航系统、水下定位应答器、SVP、DVL多普勒计程仪、水面GPS、姿态传感器、供电模块、侧扫声纳(频率100 k Hz)和前置声纳(频率400 k Hz)。侧扫声纳由发射单元(每侧3个发射通道)和接收单元(每侧24个接收通道)组成。其测量范围在5节的航速内单侧300 m;分辨率恒定15 cm,后处理后可达5 cm。
2.2.3 相关软件 SHADOWS的主要软件有World-Wind和ISDA软件。操作人员可以使用这些软件在该网络的任一图形工作站上从网络图形服务器获取数据,并以网络地理信息系统(基于WebGis)的方式处理、显示图像[4]。
3 海上测试
3.1 设备安装调试
合成孔径声纳系统的工作流程是极为严格的。必须在下水前对所有的系统设备进行连接测试。系统连接测试图见图3。

图3 系统设备连接图Fig.3 System connection diagram
3.2 合成孔径声纳系统测试
3.2.1 测试地点及环境 本次测试的地点为南海北部某100 m水深的海域,根据以往的海底管线后调查项目资料,该区域海底存在1条石油管道和1条海底电缆管线,在管道和管线的交叉处安装有管线保护压块,且其水深较大,便于进行设备的各方面性能测试。测试当天,海况3~4级,风力4~5级,阵风6级,浪高2~3 m;搭载船只为中国海监1 000 t级的执法调查船。
3.2.2 扫海测试 在该区域已知管道横切方向布设2条测线,每条测线长1 500 m;平行已知管道方向布设1条测线(见图4),测线距离管道100 m;以5节速度跑完测线,记录数据,并应用快速分块反向传播投影(Fast Facto rized Back Projection,FFBP)成像算法对测量到的管道镶嵌精度进行了处理和分析。

图4 管道测试航迹示意图Fig.4 Track line diagram
3.2.3 测试结果 SHADOWS系统在此次管道测试的覆盖量程达到单边300 m。管道测试实际测线包括了2条横切测线和1条平行测线,全部的测线都探测到已知管道和管线保护压块(见图5)。

图5 管道和压块影像Fig.5 Pipeline and block image
在图5中,SHADOWS系统的成像效果较好,管道和保护压块非常清晰,对比管线保护压块设计图,检测到的每块压块尺寸大小与设计大小相符合,压块的叠放分布状态也相符合。另外,根据压块组成设计图显示,覆盖在管线上面的每块压块由15块0.3 m大小的小压块组成,而在图5中的影像中,可以看到间隔30 cm的反射条纹,这就是这些小压块的反射图像。从SHADOWS系统最终的影像质量可以得到,本次测试SHADOWS系统的分辨率指标达到预定的效果。
3.2.4 对比仪器测试 本次测试用来进行对比的侧扫声纳为国外进口的高性能侧扫声纳(Edge Tech 2400),高频为500 k Hz,横向分辨率最高可达到30 cm,纵向分辨率为50 cm。本次海试中,对比用的侧扫声纳采用高频记录,量程100 m,以达到最高分辨率图像。
仪器对比测试的方法主要是用该侧扫声纳重复测线作业,最后对比2种仪器的图像效果。
由于管线的保护压块比较具有典型性,对于仪器对比测试,主要是2种仪器对压块的图像对比。图6中,图a为高性能侧扫声纳的影像,图b为SHADOWS的影像。
(1)两者相比,SHADOWS的影像的分辨率相对更高,对物体的图像表达更细致。从管道、压块以及旁边的拖痕的图像都可以看出SHADOWS的影像更为清晰。
(2)对比用的侧扫声纳受限于技术的原因,生成的图像长宽比例不一致,会导致图像失真现象。相比较而言,SHADOWS的影像长宽比例一致,生成的图像失真程度低,有助于物体的判读。
(3)对比用的侧扫声纳分辨率随着量程的增加而降低,而SHADOWS在有效量程内是恒定分辨率,对于大范围测量更有优势。
(4)对比用的侧扫声纳存在着拖鱼底部盲区,离底越高盲区越大,SHADOWS配置了前置声纳,解决了底部盲区的问题。
(5)对比用的侧扫声纳受限于自身仪器配备的影响,无法做到SHADOWS精确定位拖鱼运动状态,从而影响到对目标物的定位精度。
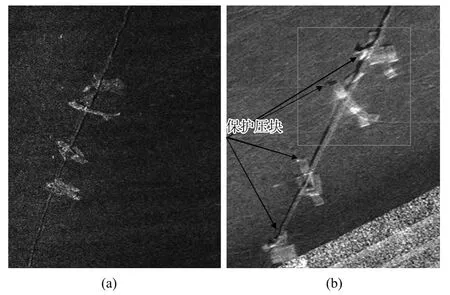
图6 管道压块影像对比图Fig.6 Pipeline block image composition diagram
从这2张管道图像来看,SHADOWS系统检测到的管道非常清晰,包括管道本身和管道的阴影都很清楚,检测到的管道宽0.67 m,高0.42 m。图7中,平行管线方向,在离管线15~50 cm的地方,发现直径约为20 cm的电缆管线。
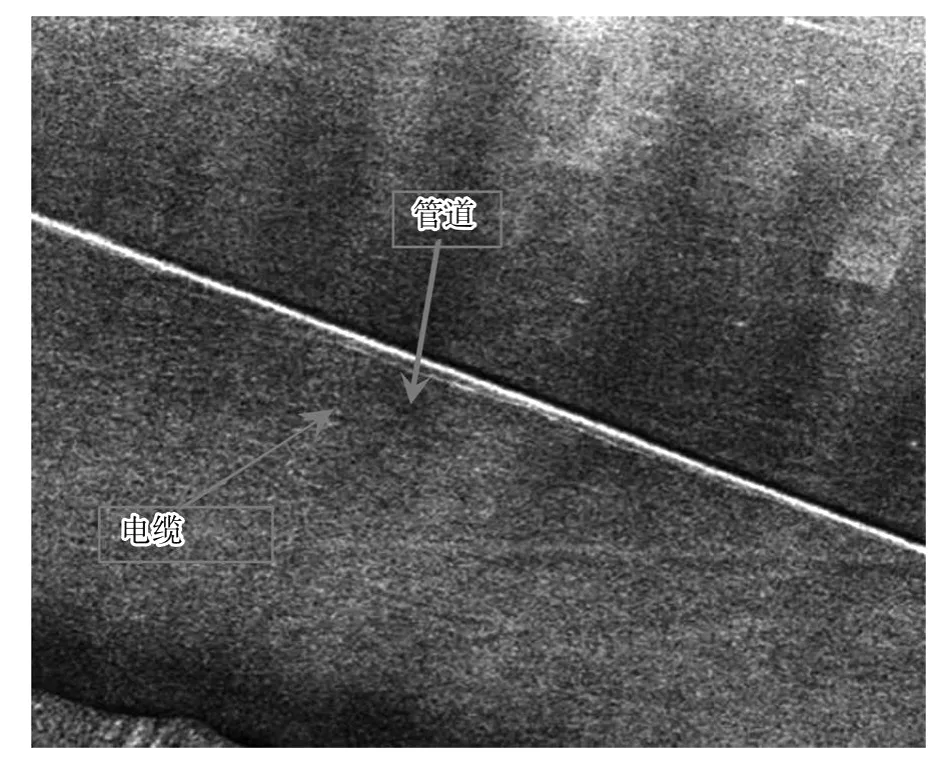
图7 Shadows管道图像截图Fig.7 Shadow s image screenshot

图8 对比侧扫声纳管道图像截图Fig.8 Side scan sonar image screenshot
图8为对比用的侧扫声纳对该管道进行测量后的管道图像,由于当时船只侧风侧浪,摇晃剧烈,对比用的侧扫声纳拖鱼没有姿态传感器,不能进行实时的姿态修正,导致成像失真较大。通过与图7的图像对比,可以看到SHADOWS系统在分辨率和目标物成像的优势非常明显。
同时,通过SHADOWS系统也可以明显看到管道旁的锚痕(见图9)。由图像看来,SHADOWS系统的分辨率比较高(现场15 cm),形成的图像也不存在由于长宽比例不一致而引起的失真现象,对于一般传统的侧扫声纳所形成的图像具有明显的优势。
3.2.5 图像镶嵌叠加效果 由于SHADOWS系统对目标物的定位精度比较高,因此就能保证图像镶嵌叠加出来的效果比较好,在测试区域总共进行了3条测线,经过了对图像数据的后处理,最后对3条测线进行图像镶嵌叠加测试并作透明化处理(见图10)。从整体上来看,在图10中可以看到,通过追踪管道在镶嵌图像上的成像连续性较好,图像没有明显管道跳线而产生镶嵌效果不好的现象。

图9 管道图像截图Fig.9 Pipeline image screen shot
从图10中有线区域图像可以看出,通过3个不同方向的测量追踪管线,其镶嵌图像上的成像结果表明该系统镶嵌效果连续性较好,图像没有明显管道跳线而产生镶嵌效果不佳的现象。
4 结论与建议
4.1 结论
通过本次测试,获取的测试成果结论有:
(1)SHADOWS系统各部分接口准确、工作协调、控制流和信息流畅通;
(2)适装性好,只要具有A型架及能够保持5节航速航行的船只都可以安装使用;
(3)拖体的投放与回收安全可靠;
(4)拖曳航行试验中,系统稳定,水密性能可靠,拖体姿态良好,传感器的数据采集正常,软件操作画面显示清晰;
(5)通过本次测试,IXSEA SHADOWS合成孔径声纳系统成图图像分辨率较高,通过后处理能达到5 cm,另外图像不存在失真现象,对目标物定位精度能达到±2 m以内,在镶嵌图方面,SHADOWS的测试结果也达到了预期效果。
(6)通过对比试验表明,IXSEA SHADOWS合成孔径声纳系统相对于传统侧扫声纳,由于技术的优越性,从图像分辨率、成图效果、对目标物定位精度以及图像镶嵌效果等方面都有着明显的优势。
(7)在本次测试中,发现该套系统采集到的原始数据质量受拖鱼在水中航行姿态影响较为明显。在风浪较大,海况超过5级、海浪超过4米,拖曳速度大于5节或者小于3节,拖鱼的横摇和纵摇均超过±10(°),原始图像质量将大幅下降。
4.2 建议
(1)由于这是我国引进的第一套合成孔径声纳系统,所以实际工作中合成孔径声纳系统操作经验非常重要,操作员需要一定的熟练度,建议平时加强训练。
(2)由于该套合成孔径声纳系统没有配置多波束测深探头,所以只能二维成像,同时也不能探测到悬浮在水中的物体;但该系统已经预留了多波束的接口,只要加装多波束探头,就可以实现三维成像,并能探测到悬浮在水中的物体。因此建议加装多波束探头,增强该套系统的探测能力。
(3)该套设备拖体相对较大,组件较多,甲板工作站也相对复杂,对于操作相对也复杂,在风浪较大的海域使用要谨慎、注意安全。
(4)由于该套系统现场采集原始数据质量受拖鱼姿态影响较为明显,建议应用流体力学的理论专门研究拖鱼姿态与航速、海况及流速的关系。
(5)参考国内外合成孔径声纳数据后处理资料,并结合合成孔径雷达的成图处理技术,进一步研究应用快速分块反向传播投影(Fast Facto rized Back Projection,FFBP)成像算法进行后处理以提高图像的分辨率(达到5 cm)。
[1] 钱刚.合成孔径声纳技术研究[D].西安:西北工业大学,2003.
[2] 张春华,刘纪元.合成孔径声纳成像及其研究进展[J].物理,声纳技术及其应用专题,2006,35(5):408-413.
[3] 李军,霍国正,郑一鸣.合成孔径声纳新进展[J].舰船电子工程,2000(6):46-50.
[4] Bucknam J N.Shadow s synthetic aperture sonar system operator manual[M].France:Ixsea,2010.
猜你喜欢
机械工程师(2022年4期)2022-04-28
潍坊学院学报(2021年2期)2021-07-22
安徽工业大学学报(自然科学版)(2020年4期)2020-12-26
考试与评价·八年级版(2020年5期)2020-10-29
装备制造技术(2020年12期)2020-05-22
计算机辅助工程(2019年1期)2019-07-09
家庭影院技术(2018年9期)2018-11-02
制造技术与机床(2017年7期)2018-01-19
自动化学报(2017年5期)2017-05-14
自动化学报(2017年5期)2017-05-14
