声学多普勒计程仪测速误差分析与补偿
2011-01-09 05:23傅菊英吴炳昭
海洋技术学报 2011年2期
傅菊英,吴炳昭
(1.中船重工第七一五研究所,浙江 杭州 310012;2.海司驻天津地区航保军事代表室,天津 300042)
声学多普勒计程仪测速误差分析与补偿
傅菊英1,吴炳昭2
(1.中船重工第七一五研究所,浙江 杭州 310012;2.海司驻天津地区航保军事代表室,天津 300042)
主要分析了声学多普勒计程仪测速误差的主要来源,并针对载体的姿态误差提出有效的补偿方法,对多普勒计程仪的安装偏差、波束方向误差和电路设计误差等固定误差,通过标定试验给出多普勒计程仪的补偿系数,并验证其有效性。
多普勒;计程仪;测速误差;补偿系数
声学多普勒计程仪是利用声学多普勒原理来测量海底相对于载体的速度和深度,其基本原理是利用水声换能器向海底或海水介质发射特定频率的定向声脉冲信号(4个不同方向),并接收从海底或海水中声波散射体上反射的回波信号,通过分析4个波束回波信号的多普勒信息,从而得到海底或海水参考层相对运载器的速度和方向,以及运载器离海底或海水参考层的高度。多普勒计程仪的测速精度直接影响到导航定位精度,因此分析多普勒计程仪测速误差的来源并加以补偿修正是提高测速精度的关键。
声学多普勒计程仪的测速误差来源包括声速误差、安装偏角误差、载体姿态误差、电路设计误差、波束方向误差等等,其中安装偏角误差、电路设计误差和波束方向误差基本为固定误差,可以通过标定试验来确定。本文研究的声学多普勒计程仪的换能器阵为相控换能器阵,采用JANUS结构配置,声速误差的影响降低为二阶小量,通常认为这些误差可以忽略不计,因此本文主要讨论固定误差的标定和载体姿态误差的补偿。
1 多普勒计程仪姿态误差分析和补偿
声学多普勒计程仪是利用声学多普勒原理来测量海底相对于载体速度的,假定水声换能器向海底发射4个不同方向的定向声脉冲信号(JANUS结构),利用声学多普勒原理分析每个波束回波信号的多普勒信息,并计算4个波束分别测量得到的载体速度(v1,v2,v3,v4),对载体速度的计算本文不作赘述,本文主要针对多普勒计程仪的测速误差进行分析与补偿。
由于载体姿态的变化(纵摇、横摇)将导致多普勒计程仪测量的偏差,特别是在载体高速航行时不允许有测量偏差。因为载体姿态的变化相对于声脉冲信号的回波时间是个慢变化,可以认为在同一发射周期内载体姿态保持一致,并通过姿态补偿方法减少多普勒计程仪由姿态变化引起的误差。
假定载体艏向的速度为vx,横向速度为vy,垂向速度为vz,发射波束与垂线的夹角为20°,如图1所示建立坐标系。设1、3波束的连线方向为X方向,2、4波束的连线方向为Y方向。而且X方向为纵摇,补偿角为θ;Y方向为横摇,补偿角为α;纵摇时埋首为负,抬头为正;横摇时向左为负,向右为正。

图1 计程仪测速坐标示意图
由图1可推得:
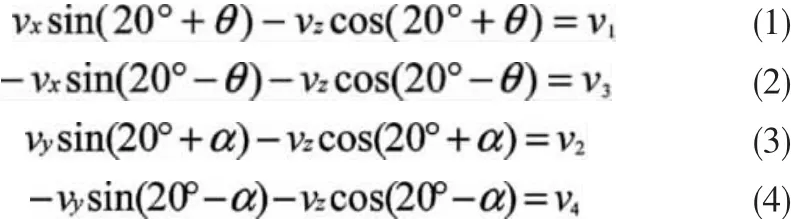
其中,v1、v2、v3、v4为 4 个波束分别测量得到的速度值,联立方程求解得:
在实际应用中,多普勒计程仪内部安装纵横摇传感器,实时采集纵横摇信息,进行姿态误差补偿,对提高测速精度是非常有效的。
2 多普勒计程仪固定误差的修正
由于多普勒计程仪的安装偏差、波束方向误差和电路设计误差等为固定误差,可以通过标定试验来确定并修正。
首先JANUS结构的4个波束之间的夹角理论上为固定值且相等,实际上不可能绝对相等,这个角度偏差会带来一定的系统误差;另外电路设计误差也是不可忽视的,如正交解调信号的相位不一致性,采集信号的零偏等均可能引起系统误差。由实验情况分析可知该系统误差可以与速度成近似比例关系,标定系数为速度的一次方。综合分析标定系数由下式确定:

在标定试验中,通过不同的测量速度对(9)式进行系数标定,标定主要采用与差分GPS的速度比对、航迹拟合的方法,试验中认为由差分GPS所得到的速度为真值。
试验时选取一开阔水域,载体分别以不同的航速进行分段匀速直线航行。在同一航速测量时,载体主机转速应保持不变,在航程线上保持规定的航向,误差不超过±1°,至少要进行3个有效航程的测速试验。在满足测速精度的前提下立方程组解算标定系数,并把所得标定系数装订至多普勒计程仪的内部软件中,作为系统误差的修正。
其次,换能器与船艏向的夹角理论上应为零,而实际安装不可能绝对精确,总有一微小偏角,此微小偏角也能产生测速误差,因此针对每一次安装必须对多普勒计程仪进行角度偏差修正。
在航行试验中,载体在测速线上匀速直航,保持主机转速恒定。通过实时数据采集软件记录多普勒计程仪的速度、差分GPS方位信息、罗经航向信息。由差分GPS的方位信息计算出整个航段的航迹图,并将此轨迹图作为标准航迹图。多普勒计程仪和罗经航向信号解算得到测量航迹图,根据两个航迹图的比较,可以标定出多普勒计程仪的安装偏角。
假设载体航迹向和航向的夹角为α,则

式中:α为载体航迹向与航向的夹角;θ为差分GPS定位计算求得的航迹向角;β为罗经测量的航向角。
因此分解航迹向速度v得到载体的纵向速度vx和横向速度vy的标准值为:

对采集的数据进行整理和处理,用3σ原则剔除含粗大误差的数据后,分别计算每个航程上由差分GPS和多普勒计程仪测得的载体纵向速度和横向速度的平均值。

式中:vxci、vyci为每个航程上由差分GPS测得的纵向速度分量和横向速度分量的平均值;vxli、vyli为每个航程上由多普勒计程仪测得的纵向速度分量和横向速度分量的平均值。
然后计算由差分GPS和多普勒计程仪测得的N个航程载体纵向速度和横向速度的平均值。

式中:vxc、vyc分别是由差分GPS测得的N个航程载体的纵向速度和横向速度的平均值;vxl、vyl分别是由多普勒计程仪测得的N个航程载体的纵向速度和横向速度的平均值。
最后计算多普勒计程仪的安装偏角Pi为:

N个航程所得安装偏角的平均值即为安装偏角的修正值。
3 实验数据分析比对
在某次的标定试验中,同时有几套多普勒计程仪进行系数标定和角度修正。下面是其中一套多普勒计程仪误差补偿前后的对比(如图2~图3)。
通过对1#计程仪的测速数据分析,得到标定系数:A=1.043 7,B=0,修正角度α=1.48°。然后代入同一批数据得到以下比对结果,测速精度有了明显提高。
把所得标定系数装订至多普勒计程仪的内部软件中,作为系统误差的修正,然后进行验证试验。以下是验证航行试验时与GPS的航迹比对图(如图4)。
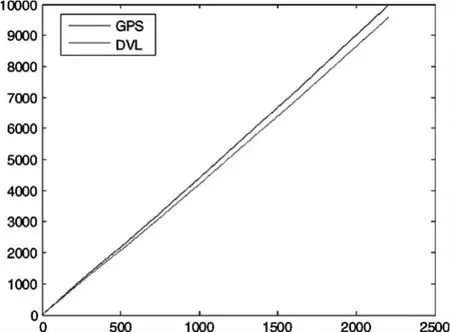
图2 1#计程仪与GPS的航行轨迹比对示意图(标定前)
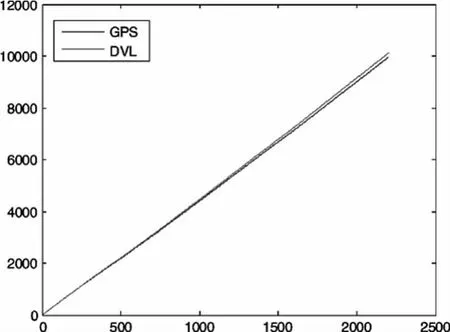
图3 1#计程仪与GPS的航行轨迹比对示意图(标定后)

图4 1#计程仪与GPS的航行轨迹比对示意图(标定后)
4 结束语
在国家高技术研究发展计划(863计划)的支持下,研制成功了用于水下运载器的大深度高精度多普勒计程仪工程样机。高精度多普勒计程仪可应用于水下运载器的导航定位,为导航系统提供精确的速度信息,以修正导航系统由于长时间的速度误差累积,满足远程、长时间航行的导航要求,因此提高多普勒计程仪的测速精度显得尤为重要。本课题研制的高精度多普勒计程仪通过湖上试验和海上试验数据的分析和验证,对多普勒计程仪的固定误差和姿态误差的修正和补偿是非常有效的,大大提高了多普勒计程仪的测速精度。
[1]沈斌坚,唐义政.声学多普勒海流剖面仪的原理和设计[J].声学与电子工程,2005(1):1-3.
[2]丛卫华,沈斌坚.国内相控阵ADCP技术的开发研究[J].声学与电子工程,2001,3:20-22.
[3]R Lee Gordon.Acoustic Doppler Current Profiler Principles of Operation A Practical Primer[M].RD Instruments,1996.
[4]Brumley,et al.System and Method for Measuring Wave Directional Spectrum and Wave Height:USA,6052334[P].2001.
Error Analysis and Compensation of Acoustic Doppler Velocity Log
FU Ju-ying1,WU Bing-zhao2
(1.715 Research Institute of China Shipbuilding Industry Corporation,Hangzhou Zhejiang 310012,China;2.Military Representative Office of Navy Headquarters Navigation Guarantee Department in Tianjin,Tianjin 300042,China)
The main sources of error for the acoustic Doppler Velocity Log(DVL)were analyzed.The effective compensation method was proposed to solve the attitude error of vector.The DVL misalignment,beam direction error and circuit design error etc.were compensated through the calibration tests,which verified the effectiveness.
Doppler;velocity log;speed error;compensation coefficient
TB566
A
1003-2029(2011)02-0091-03
2010-10-16
国家高技术研究发展计划(863计划)资助项目(2006AA09Z225)
猜你喜欢
家庭影院技术(2020年6期)2020-07-27
舰船科学技术(2020年3期)2020-04-22
青年歌声(2019年12期)2019-12-17
通信技术(2019年3期)2019-05-31
家庭影院技术(2019年1期)2019-01-21
家庭影院技术(2018年11期)2019-01-21
家庭影院技术(2018年10期)2018-11-02
北京航空航天大学学报(2017年7期)2017-11-24
声学与电子工程(2017年1期)2017-06-22
北京航空航天大学学报(2016年6期)2016-11-16