PMT校频技术在航标灯设计中的应用
2011-01-09 05:22刘世萱
海洋技术学报 2011年2期
赵 力 ,齐 勇 ,刘世萱 ,2,付 晓 ,苗 斌
(1.山东省科学院海洋仪器仪表研究所,山东 青岛266001;2.中国海洋大学计算机科学与技术系,山东 青岛266100)
PMT校频技术在航标灯设计中的应用
赵 力1,齐 勇1,刘世萱1,2,付 晓1,苗 斌1
(1.山东省科学院海洋仪器仪表研究所,山东 青岛266001;2.中国海洋大学计算机科学与技术系,山东 青岛266100)
在航标灯应用研究中,为解决ATmega8L单片机在工作电压上升过程中,系统频率不稳定的问题,提出一种基于单片机电源管理技术(PWM)的校频方法。针对航标灯工作环境光照度变化缓慢的特点,提出过渡时间TINT的概念。利用AVR单片机PMT的空闲模式,结合看门狗唤醒功能,在不改动电路的前提下,实现了单片机系统时钟自动校频的功能。
ATmega8L;过渡时间;PMT;自动校频
航标灯的正常工作是确保海上航行和设备安全的重要因素[1]。在航标灯研究中,由于环境光照度变化是一个缓慢的过程,当光照度降低至电路触发阈值ET时,要求控制电路对单片机工作电压VCC的跃变时间具有极高的控制能力。在光照度逐渐降低的过程中,控制电路CMOS开关管工作在不饱和导通状态。这个过程导致单片机的工作电压由0跃变到VCC,其跃变时间可能远远超过几个机器周期。从理论上讲,VCC低于正常工作电压时,无法保证单片机CPU和Flash正常工作,Flash的内容可能受到破坏。电压太低时有两种情况可以破坏 Flash内容,第一,Flash写过程需要一个最低电压;第二,电压太低时 CPU本身会错误地执行指令[2]。
控制器是航标灯控制电路的核心[3]。为了消除上述问题对电路状态的影响,选用ATmega8L单片机作为控制器。ATmega8L的工作电压VCC标准值为3.3 V。由于采用了ATMEL的高密度非易失性内存技术[2],在电压不稳定时能够保护Flash的内容不受损坏。这一点我们通过实验得到了验证。当ATmega8L单片机工作在低压状态时,Flash的内容不会受到损坏。但其系统时钟ClkCPU却可能发生偏移,并且最大偏移量可达15%。当ClkCPU发生偏移时,指令周期随之发生偏移,虽然CPU执行指令时序逻辑不变,但航标灯闪烁周期发生偏移,即影响灯质信息的表达。一旦ClkCPU发生偏移,即使VCC达到正常值,也可能一直保持在偏移状态。这样航标灯的灯质信息就会发生改变。为解决此问题,传统的办法一般是采用单稳态触发电路[4],例如施密特触发器等。当光照度第一次降至触发阈值ET以后,触发器翻转将主电路锁定在导通状态。当光照度回升到触发阈值ET时,触发器翻转将主电路锁定在截止状态。这个办法从根本上缩短了VCC跃变的时间,但是增加了电路成本。利用ATmega8L单片机自身的电源管理能力,我们提出一种基于电源管理技术(Power Manage Technology,简称PMT)的解决办法。
1 原理分析
在航标灯应用中,CMOS管不饱和导通的情况出现在ET附近。因为在一段时间内,环境光照度会在ET附近上下波动。这段时间对应一个环境光照度范围,我们称这个范围为光照度的过渡区,过渡区对应的环境光照度的变化量,以ΔE表示。假设该阈值光照度上限为ETH,下限为ETL。

在环境光照度下降的过程中,光照度从上限值ETH到最后一次经过触发值ET之间的时间称为下降过渡时间,以TINT1表示。在环境光照度上升的过程中,光照度从下限值ETL到最后一次经过触发值ET之间的时间为上升过渡时间,以TINT2表示。在环境光照度上升或下降过程中,光照度从第一次到最后一次经过触发值ET之间的时间为ΔT。为了保证航标灯正常工作,其过渡时间TINT应涵容下降过渡时间TINT1和上升过渡时间TINT2。因此我们只要保证在ΔE之外不发生光照度越过ET的变化,即可保证电路控制的可靠性。如图1所示,当光照度在过渡区上限值ETH之外,CMOS管处于截止区。当光照度达到过渡区上限值ETH时,CMOS管开始导通,处于不饱和导通区。当光照度达到触发值ET时,CMOS管达到饱和导通状态,随着光照度在触发值ET附近摆动,CMOS管工作在不稳定饱和导通状态。直到光照度最后一次摆动越过触发值ET后,CMOS管工作在稳定饱和导通区内。
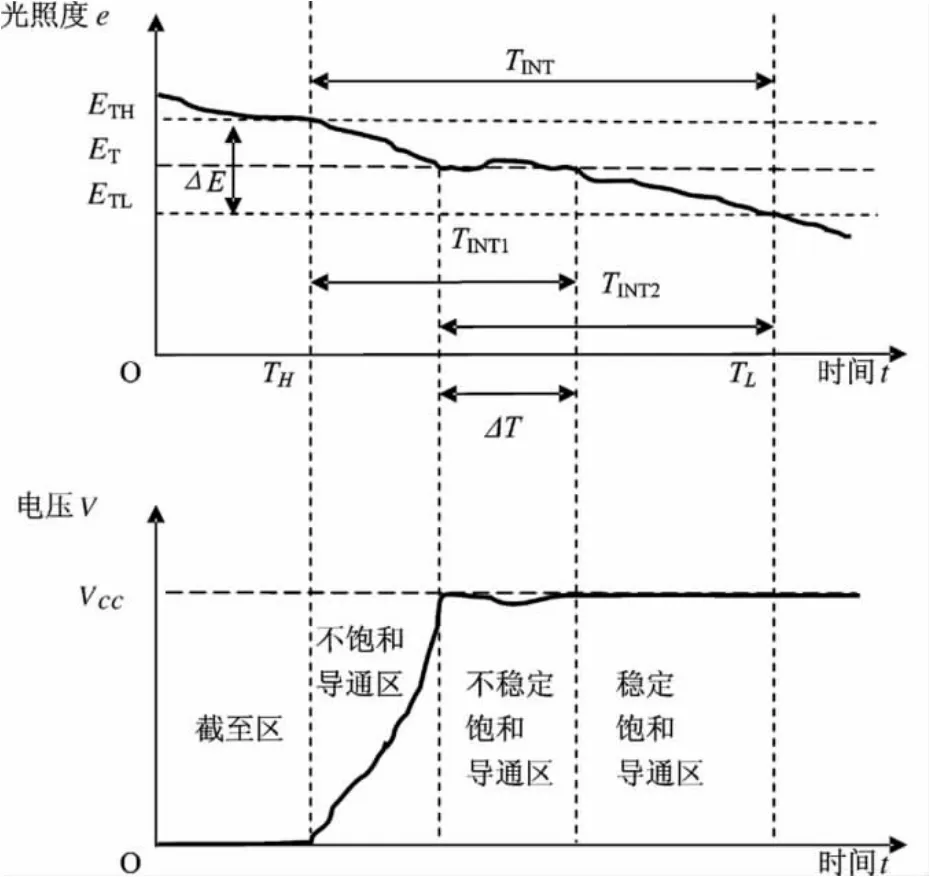
图1 过渡时间和CMOS管导通状态示意图
根据图1,有如下关系:

式中:E表示环境光照度;t表示时间;f表示光照度E和时间t的对应关系;TH表示过渡区光照度上限值ETH对应的时刻;TL表示过渡区下限光照度值ETL对应的时刻。由于在一段极短的时间Δt之内,光照度随时间成单调关系,每一个时刻T对应唯一的光照度值f(T)。由式(2):

根据式(4),可以得到环境光照度达到ETH的时刻TH,表示为:

根据式(5),可以得到环境光照度达到 ETL的时刻TL,表示为:

根据图 1,式(3)与式(4)本质上相同,由式(3)、式(7)、式(8),得:

f-1表示f的反函数。航标灯的光照度传感器可以实时测量环境光照度值。根据式(9),过渡时间TINT可以用环境光照度过渡区阈值上下限对应的时间来计算。在设计程序时,可以实现根据光照度过渡区阈值的大小来设置过渡时间的功能。航标灯每次从开始加电到指令执行完过渡时间TINT,CMOS管进入稳定饱和导通区,单片机电源升至标准值VCC。利用ATmega8L的PMT技术使CPU进入的休眠模式,再使用看门狗唤醒技术自动唤醒MCU。此时,唤醒后的MCU已摆脱频率偏移的影响,航标灯就能够正常工作了。
2 PMT和休眠模式
ATmega8L单片机的电源管理模块可使单片机进入休眠模式。休眠模式意味着在应用程序中关掉MCU中没有使用的模块,从而降低功耗。ATmega8L具有不同的睡眠模式,进入睡眠模式的条件是置位寄存器MCUCR的SE,然后执行SLEEP指令。具体哪一种模式由MCUCR的SM2,SM1和SM0决定,如表1所示。使能的中断可以将进入睡眠模式的MCU唤醒。经过启动时间,外加4个时钟周期后,MCU就可以运行中断例程了。然后返回到SLEEP的下一条指令。唤醒时不会改变寄存器文件和SRAM的内容。如果在睡眠过程中发生了复位,则MCU唤醒后从中断向量开始执行[2]。
MCU控制寄存器MCUCR包含了电源管理的控制位。

其中,SE为休眠使能位。为了使MCU在执行SLEEP指令后进入休眠模式,SE必须置位,同时低四位无效。MCU一旦唤醒立即清除SE。SM2,SM1,SM0为休眠模式选择位。这3位用于选择具体的休眠模式,如表1所示[2]。
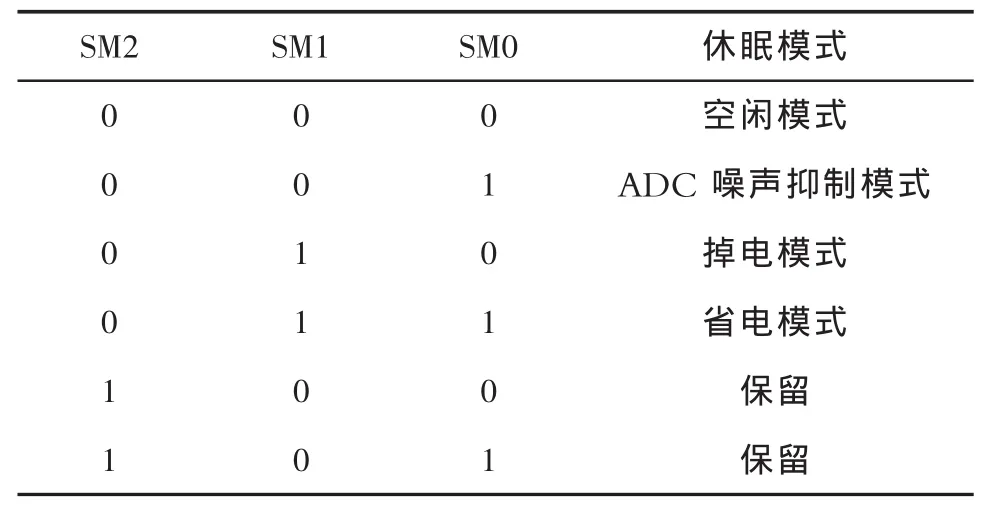
表1 休眠模式选择
在该方法中,我们选择掉电休眠模式。当SM2..0为010时,SLEEP指令将使MCU进入掉电模式。在此模式下,外部晶体停振,而外部中断、两线接口地址匹配及看门狗(如果使能的话)继续工作。只有外部复位、看门狗复位、BOD复位、两线接口地址匹配中断、外部电平中断INT0或INT1,或外部中断INT2可以使MCU脱离掉电模式。这个睡眠模式的优点是停止了所有的时钟,唤醒时系统时钟重新开始工作,可以解决频率偏移的问题。
3 实验过程
根据上述原理分析,从程序着手进行校频实验。我们使用高灵敏度的光敏传感器对环境光照度进行检测,从光照度过渡区上限值ETH开始计时,经过过渡时间TINT后,使单片机进入掉电休眠模式。同时启动看门狗定时器,当看门狗定时器溢出时,利用电源管理模块的看门狗唤醒技术自动唤醒MCU。编程时,编辑熔丝位WTDON,预置看门狗定时器常开。控制程序如下:
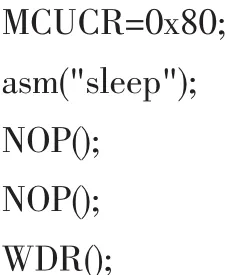
实验中,航标灯使用摩尔斯O码灯质,工作周期为12 s[5]。当发生频率偏移时,通过检测环境光照度的值,当发现光照度达到过渡区的上限值EH时,使MCU执行休眠指令时进入掉电模式,同时启动看门狗定时器。当看门狗定时器溢出时,系统复位。此时保证已经过光照度的过渡区,CMOS开关管完全导通,VCC达到标准值3.3 V,就可以保证MCU时钟正常工作了。指令如下:
经过反复试验,使用上述控制语句很好地解决了系统时钟的频率偏移问题。这证明PMT技术和看门狗唤醒语句实现MCU自动校频功能,不但从原理上是可行的,从实际应用中来看也是可以实现的。
4 结论
本文的方法是一种新的单片机自动校频手段。该方法在软件上通过一条掉电休眠指令和看门狗复位指令,来保证单片机系统频率的稳定性。实验表明,该方法可以很好地解决MEGA8L单片机上电过程中的频率偏移问题。采用软件校频的方法有助于实现航标灯设计简单,低功耗,低成本,高可靠性的目标[6]。另外,该方法既可以单独使用,也可以配合硬件触发器电路一起使用,相当于为单片机的系统时钟上了双保险,从而确保单片机可以持续稳定地工作。
[1]周 奎,张晓川,杜效农.航标灯的自动监控[J].世界海运,2007(2):31-32.
[2]马潮,詹位前,等.ATMEGA8原理及应用手册[M].北京:清华大学出版社,2003.
[3]李月楼.一体化太阳能航标灯技术与应用探讨[J].珠江水运,2005(5):39-40.
[4] 高志,林玉池.航标灯工作状态检测电路设计[J].海洋技术,2006,25(1):45-57.
[5]齐勇,刘世萱,张曙伟,等.基于PWM技术的新型航标灯设计[J].山东科学,2008(3):60-63.
[6]肖必超.基于单片机的航标灯控制电路设计[J].大众科技,2008(8):103-114.
Application of PMT Technique in Pharos Design
ZHAO Li1,QI Yong1,LIU Shi-xuan1,2,FU Xiao1,MIAO Bin1
(1.Institute of Oceanographic Instrumentation,Shandong Academy of Sciences,Qingdao Shandong 266001,China;2.Department of Computer Science and Technology,Ocean University of China,Qingdao Shandong 266100,China)
In the design of pharos,in order to resolve the problem of frequency shaking during the process of rising of working voltage,a new method based on PMT technique is proposed.According to the feature of intensity of illumination in the environment of pharos,the concept of transit time (TINT)is issued.Without any changing of electric circuit,the function of auto frequency adjustment is enforced using the idle mode of ATmega8L based on PMT (power manage technique)and the waking up skill of watchdog.
ATmega8L;transit time;PWM;auto frequency adjustment
U644.4
B
1003-2029(2011)02-0110-03
2011-02-22
国家高技术研究发展计划(863计划)资助项目(2007AA092103)
赵力(1958-),女,高级工程师,主要从事海洋仪器方面研究。
猜你喜欢
传感器世界(2022年7期)2022-10-12
湖北农业科学(2022年12期)2022-07-21
中国海事(2022年2期)2022-03-01
阅读(高年级)(2019年10期)2019-12-13
江苏农业科学(2018年15期)2018-09-10
小学生作文(低年级适用)(2017年11期)2017-12-20
农业工程技术·温室园艺(2016年9期)2017-04-23
教育界·中旬(2017年1期)2017-03-28
群众(2016年8期)2016-08-15
大众科技(2015年11期)2015-11-24